|
|
@@ -0,0 +1,15373 @@
|
|
|
+From 3d7fabf23eeae26b7d739fbb649090aa590dcf3b Mon Sep 17 00:00:00 2001
|
|
|
+From: supperthomas <78900636@qq.com>
|
|
|
+Date: Fri, 6 May 2022 23:06:28 +0800
|
|
|
+Subject: [PATCH 1/4] add the config of RTTHREAD
|
|
|
+
|
|
|
+add the init link file
|
|
|
+---
|
|
|
+ Kconfig | 4 +
|
|
|
+ .../esp_system/ld/esp32c3/sections.ld.in | 26 +++
|
|
|
+ components/freertos/port/port_common.c | 5 +
|
|
|
+ components/freertos/port/port_systick.c | 3 +
|
|
|
+ components/riscv/vectors.S | 220 ++++++++++++++++--
|
|
|
+ 5 files changed, 239 insertions(+), 19 deletions(-)
|
|
|
+
|
|
|
+diff --git a/Kconfig b/Kconfig
|
|
|
+index 928d274106..d368adaa37 100644
|
|
|
+--- a/Kconfig
|
|
|
++++ b/Kconfig
|
|
|
+@@ -61,6 +61,10 @@ mainmenu "Espressif IoT Development Framework Configuration"
|
|
|
+ bool
|
|
|
+ default "y" if IDF_TARGET="linux"
|
|
|
+
|
|
|
++ config IDF_RTOS_RTTHREAD
|
|
|
++ bool "RT-THREAD SELECT"
|
|
|
++ default "n"
|
|
|
++
|
|
|
+ config IDF_FIRMWARE_CHIP_ID
|
|
|
+ hex
|
|
|
+ default 0x0000 if IDF_TARGET_ESP32
|
|
|
+diff --git a/components/esp_system/ld/esp32c3/sections.ld.in b/components/esp_system/ld/esp32c3/sections.ld.in
|
|
|
+index 0ebeda06c1..8215237fff 100644
|
|
|
+--- a/components/esp_system/ld/esp32c3/sections.ld.in
|
|
|
++++ b/components/esp_system/ld/esp32c3/sections.ld.in
|
|
|
+@@ -183,6 +183,32 @@ SECTIONS
|
|
|
+ _noinit_end = ABSOLUTE(.);
|
|
|
+ } > dram0_0_seg
|
|
|
+
|
|
|
++ .stack_dummy (COPY):
|
|
|
++ {
|
|
|
++ . = ALIGN(8);
|
|
|
++ __STACKSIZE__ = 40960;
|
|
|
++ __stack_start__ = .;
|
|
|
++ *(.stack*)
|
|
|
++ . += __STACKSIZE__;
|
|
|
++ __stack_cpu0 = .;
|
|
|
++ __stack_end__ = .;
|
|
|
++ } > dram0_0_seg
|
|
|
++
|
|
|
++ .stack_dummy (COPY):
|
|
|
++ {
|
|
|
++ . = ALIGN(8);
|
|
|
++ __HEAPSIZE__ = 40960;
|
|
|
++ __heap_start__ = .;
|
|
|
++ . += __STACKSIZE__;
|
|
|
++ __heap_end__ = .;
|
|
|
++ /* section information for initial. */
|
|
|
++ . = ALIGN(4);
|
|
|
++ __rt_init_start = .;
|
|
|
++ KEEP(*(SORT(.rti_fn*)))
|
|
|
++ __rt_init_end = .;
|
|
|
++
|
|
|
++ . = ALIGN(4);
|
|
|
++ } > dram0_0_seg
|
|
|
+ /* Shared RAM */
|
|
|
+ .dram0.bss (NOLOAD) :
|
|
|
+ {
|
|
|
+diff --git a/components/freertos/port/port_common.c b/components/freertos/port/port_common.c
|
|
|
+index ffca3d5429..9d8159f588 100644
|
|
|
+--- a/components/freertos/port/port_common.c
|
|
|
++++ b/components/freertos/port/port_common.c
|
|
|
+@@ -74,11 +74,16 @@ void esp_startup_start_app_common(void)
|
|
|
+ esp_gdbstub_init();
|
|
|
+ #endif // CONFIG_ESP_SYSTEM_GDBSTUB_RUNTIME
|
|
|
+
|
|
|
++#ifdef CONFIG_IDF_RTOS_RTTHREAD
|
|
|
++ app_main();
|
|
|
++#else
|
|
|
+ portBASE_TYPE res = xTaskCreatePinnedToCore(&main_task, "main",
|
|
|
+ ESP_TASK_MAIN_STACK, NULL,
|
|
|
+ ESP_TASK_MAIN_PRIO, NULL, ESP_TASK_MAIN_CORE);
|
|
|
+ assert(res == pdTRUE);
|
|
|
+ (void)res;
|
|
|
++#endif
|
|
|
++
|
|
|
+ }
|
|
|
+
|
|
|
+ static void main_task(void* args)
|
|
|
+diff --git a/components/freertos/port/port_systick.c b/components/freertos/port/port_systick.c
|
|
|
+index 0c14a155a1..0fa203574b 100644
|
|
|
+--- a/components/freertos/port/port_systick.c
|
|
|
++++ b/components/freertos/port/port_systick.c
|
|
|
+@@ -116,6 +116,8 @@ void vPortSetupTimer(void)
|
|
|
+ */
|
|
|
+ IRAM_ATTR void SysTickIsrHandler(void *arg)
|
|
|
+ {
|
|
|
++#ifdef CONFIG_IDF_RTOS_RTTHREAD
|
|
|
++#else
|
|
|
+ uint32_t cpuid = xPortGetCoreID();
|
|
|
+ systimer_hal_context_t *systimer_hal = (systimer_hal_context_t *)arg;
|
|
|
+ #ifdef CONFIG_PM_TRACE
|
|
|
+@@ -144,6 +146,7 @@ IRAM_ATTR void SysTickIsrHandler(void *arg)
|
|
|
+ #ifdef CONFIG_PM_TRACE
|
|
|
+ ESP_PM_TRACE_EXIT(TICK, cpuid);
|
|
|
+ #endif
|
|
|
++#endif
|
|
|
+ }
|
|
|
+
|
|
|
+ #endif // CONFIG_FREERTOS_SYSTICK_USES_CCOUNT
|
|
|
+diff --git a/components/riscv/vectors.S b/components/riscv/vectors.S
|
|
|
+index 1006d5bea5..963494fcb3 100644
|
|
|
+--- a/components/riscv/vectors.S
|
|
|
++++ b/components/riscv/vectors.S
|
|
|
+@@ -17,6 +17,9 @@
|
|
|
+ #include "soc/soc_caps.h"
|
|
|
+ #include "sdkconfig.h"
|
|
|
+
|
|
|
++#define STORE sw
|
|
|
++#define LOAD lw
|
|
|
++#define REGBYTES 4
|
|
|
+
|
|
|
+ .equ SAVE_REGS, 32
|
|
|
+ .equ CONTEXT_SIZE, (SAVE_REGS * 4)
|
|
|
+@@ -218,25 +221,27 @@ _call_panic_handler:
|
|
|
+ */
|
|
|
+ .global _interrupt_handler
|
|
|
+ .type _interrupt_handler, @function
|
|
|
++#ifndef CONFIG_IDF_RTOS_RTTHREAD
|
|
|
++
|
|
|
+ _interrupt_handler:
|
|
|
+ /* entry */
|
|
|
+- save_regs
|
|
|
+- save_mepc
|
|
|
++ save_regs /* 保存寄存器 */
|
|
|
++ save_mepc /* 保存MEPC */
|
|
|
+
|
|
|
+ /* Before doing anythig preserve the stack pointer */
|
|
|
+ /* It will be saved in current TCB, if needed */
|
|
|
+- mv a0, sp
|
|
|
++ mv a0, sp /* 保存SP a0 = sp */
|
|
|
+ call rtos_int_enter
|
|
|
+
|
|
|
+ /* Before dispatch c handler, restore interrupt to enable nested intr */
|
|
|
+- csrr s1, mcause
|
|
|
+- csrr s2, mstatus
|
|
|
++ csrr s1, mcause /* 保存mcause s1 = mcause */
|
|
|
++ csrr s2, mstatus /* 保存mstatus s2 = mstatus */
|
|
|
+
|
|
|
+- /* Save the interrupt threshold level */
|
|
|
+- la t0, INTERRUPT_CORE0_CPU_INT_THRESH_REG
|
|
|
+- lw s3, 0(t0)
|
|
|
++ /* Save the interrupt threshold level 保存中断嵌套层数? */
|
|
|
++ la t0, INTERRUPT_CORE0_CPU_INT_THRESH_REG /* 保存mstatus t0 = &INTERRUPT_CORE0_CPU_INT_THRESH_REG */
|
|
|
++ lw s3, 0(t0) /* s3 = mstatus */
|
|
|
+
|
|
|
+- /* Increase interrupt threshold level */
|
|
|
++ /* Increase interrupt threshold level 增加中断嵌套层数*/
|
|
|
+ li t2, 0x7fffffff
|
|
|
+ and t1, s1, t2 /* t1 = mcause & mask */
|
|
|
+ slli t1, t1, 2 /* t1 = mcause * 4 */
|
|
|
+@@ -247,8 +252,8 @@ _interrupt_handler:
|
|
|
+ sw t2, 0(t0) /* INTERRUPT_CORE0_CPU_INT_THRESH_REG = t2 */
|
|
|
+ fence
|
|
|
+
|
|
|
+- li t0, 0x8
|
|
|
+- csrrs t0, mstatus, t0
|
|
|
++ li t0, 0x8 /* t0 = 8 */
|
|
|
++ csrrs t0, mstatus, t0 /*设置状态MIE寄存器,开总中断*/
|
|
|
+
|
|
|
+ #ifdef CONFIG_PM_TRACE
|
|
|
+ li a0, 0 /* = ESP_PM_TRACE_IDLE */
|
|
|
+@@ -269,34 +274,211 @@ _interrupt_handler:
|
|
|
+ /* call the C dispatcher */
|
|
|
+ mv a0, sp /* argument 1, stack pointer */
|
|
|
+ mv a1, s1 /* argument 2, interrupt number (mcause) */
|
|
|
+- /* mask off the interrupt flag of mcause */
|
|
|
++ /* mask off the interrupt flag of mcause 屏幕异常中断*/
|
|
|
+ li t0, 0x7fffffff
|
|
|
+ and a1, a1, t0
|
|
|
+ jal _global_interrupt_handler
|
|
|
+
|
|
|
+- /* After dispatch c handler, disable interrupt to make freertos make context switch */
|
|
|
++ /* After dispatch c handler, disable interrupt to make freertos make context switch
|
|
|
++ 在调用c函数之后,disable 中断让freertos能够做内容切换
|
|
|
++ */
|
|
|
+
|
|
|
+ li t0, 0x8
|
|
|
+- csrrc t0, mstatus, t0
|
|
|
++ csrrc t0, mstatus, t0 /*清状态MIE寄存器 关总中断*/
|
|
|
+
|
|
|
+- /* restore the interrupt threshold level */
|
|
|
++
|
|
|
++ /* restore the interrupt threshold level 中断嵌套 */
|
|
|
+ la t0, INTERRUPT_CORE0_CPU_INT_THRESH_REG
|
|
|
+ sw s3, 0(t0)
|
|
|
+ fence
|
|
|
+
|
|
|
+ /* Yield to the next task is needed: */
|
|
|
+- mv a0, sp
|
|
|
++ mv a0, sp /* a0 = sp*/
|
|
|
+ call rtos_int_exit
|
|
|
+
|
|
|
+ /* The next (or current) stack pointer is returned in a0 */
|
|
|
+- mv sp, a0
|
|
|
++ mv sp, a0 /* sp = a0*/
|
|
|
+
|
|
|
+ /* restore the rest of the registers */
|
|
|
+- csrw mcause, s1
|
|
|
+- csrw mstatus, s2
|
|
|
++ csrw mcause, s1 /* mcause = s1 */
|
|
|
++ csrw mstatus, s2 /* mstatus = s2 */
|
|
|
+ restore_mepc
|
|
|
+ restore_regs
|
|
|
+
|
|
|
+ /* exit, this will also re-enable the interrupts */
|
|
|
+ mret
|
|
|
+ .size _interrupt_handler, .-_interrupt_handler
|
|
|
++#else
|
|
|
++_interrupt_handler:
|
|
|
++ /* 此时CPU的sp = from_thread->sp */
|
|
|
++ /* 注意: 在这里,并没有将mepc的值赋值为from_thread栈中的epc,但后面会赋值 */
|
|
|
++ addi sp, sp, -32 * REGBYTES /* sp = sp - 32 * 4 栈指针向下偏移32个寄存器长度,用来将CPU的寄存器保存到from_thread的栈中*/
|
|
|
++ STORE x1, 1 * REGBYTES(sp) /* 将CPU的x1寄存器,即ra寄存器,保存到from_thread->栈中 */
|
|
|
++
|
|
|
++ li t0, 0x80 /* t0 = 0x80 */
|
|
|
++ STORE t0, 2 * REGBYTES(sp) /* mstatus = t0, 即关闭全局中断 */
|
|
|
++
|
|
|
++ /* 将 CPU 的其他寄存器的值,保存到from_thread的任务栈中 */
|
|
|
++ STORE x4, 4 * REGBYTES(sp)
|
|
|
++ STORE x5, 5 * REGBYTES(sp)
|
|
|
++ STORE x6, 6 * REGBYTES(sp)
|
|
|
++ STORE x7, 7 * REGBYTES(sp)
|
|
|
++ STORE x8, 8 * REGBYTES(sp)
|
|
|
++ STORE x9, 9 * REGBYTES(sp)
|
|
|
++ STORE x10, 10 * REGBYTES(sp)
|
|
|
++ STORE x11, 11 * REGBYTES(sp)
|
|
|
++ STORE x12, 12 * REGBYTES(sp)
|
|
|
++ STORE x13, 13 * REGBYTES(sp)
|
|
|
++ STORE x14, 14 * REGBYTES(sp)
|
|
|
++ STORE x15, 15 * REGBYTES(sp)
|
|
|
++ STORE x16, 16 * REGBYTES(sp)
|
|
|
++ STORE x17, 17 * REGBYTES(sp)
|
|
|
++ STORE x18, 18 * REGBYTES(sp)
|
|
|
++ STORE x19, 19 * REGBYTES(sp)
|
|
|
++ STORE x20, 20 * REGBYTES(sp)
|
|
|
++ STORE x21, 21 * REGBYTES(sp)
|
|
|
++ STORE x22, 22 * REGBYTES(sp)
|
|
|
++ STORE x23, 23 * REGBYTES(sp)
|
|
|
++ STORE x24, 24 * REGBYTES(sp)
|
|
|
++ STORE x25, 25 * REGBYTES(sp)
|
|
|
++ STORE x26, 26 * REGBYTES(sp)
|
|
|
++ STORE x27, 27 * REGBYTES(sp)
|
|
|
++ STORE x28, 28 * REGBYTES(sp)
|
|
|
++ STORE x29, 29 * REGBYTES(sp)
|
|
|
++ STORE x30, 30 * REGBYTES(sp)
|
|
|
++ STORE x31, 31 * REGBYTES(sp)
|
|
|
++
|
|
|
++ /* 备份 CPU 的 sp (这时,CPU的sp其实就是from thread的sp指针) 寄存器的值到 s0 寄存器中,下面会使用s0,恢复 CPU 的寄存器 */
|
|
|
++ move s0, sp /* s0 = sp */
|
|
|
++
|
|
|
++ /* 在中断函数中,中断函数中调用的C函数,需要使用 sp, 这里,在中断函数中,使用的 sp 为,系统的栈资源 */
|
|
|
++ /* switch to interrupt stack */
|
|
|
++ la sp, __stack_end__ /* sp = _sp */
|
|
|
++
|
|
|
++ /* interrupt handle */
|
|
|
++ /* 注意: 在调用C函数之前,比如sp的值为0x30001000, 在执行完C函数后,sp的值还是会变成 0x30001000 */
|
|
|
++ call rt_interrupt_enter /* 执行所有的中断函数前,调用该函数 */
|
|
|
++
|
|
|
++ csrr s1, mcause
|
|
|
++ csrr s2, mstatus
|
|
|
++
|
|
|
++ /* Save the interrupt threshold level */
|
|
|
++ la t0, INTERRUPT_CORE0_CPU_INT_THRESH_REG
|
|
|
++ lw s3, 0(t0)
|
|
|
++
|
|
|
++ li t2, 0x7fffffff
|
|
|
++ and t1, s1, t2 /* t1 = mcause & mask */
|
|
|
++ slli t1, t1, 2 /* t1 = mcause * 4 */
|
|
|
++ la t2, INTC_INT_PRIO_REG(0)
|
|
|
++ add t1, t2, t1 /* t1 = INTC_INT_PRIO_REG + 4 * mcause */
|
|
|
++ lw t2, 0(t1) /* t2 = INTC_INT_PRIO_REG[mcause] */
|
|
|
++ addi t2, t2, 1 /* t2 = t2 +1 */
|
|
|
++ sw t2, 0(t0) /* INTERRUPT_CORE0_CPU_INT_THRESH_REG = t2 */
|
|
|
++ fence
|
|
|
++
|
|
|
++ li t0, 0x8
|
|
|
++ csrrs t0, mstatus, t0
|
|
|
++
|
|
|
++ /* call the C dispatcher */
|
|
|
++ mv a0, sp /* argument 1, stack pointer */
|
|
|
++ mv a1, s1 /* argument 2, interrupt number (mcause) */
|
|
|
++ /* mask off the interrupt flag of mcause */
|
|
|
++ li t0, 0x7fffffff
|
|
|
++ and a1, a1, t0
|
|
|
++ jal _global_interrupt_handler
|
|
|
++
|
|
|
++ li t0, 0x8
|
|
|
++ csrrc t0, mstatus, t0
|
|
|
++
|
|
|
++ /* restore the interrupt threshold level */
|
|
|
++ la t0, INTERRUPT_CORE0_CPU_INT_THRESH_REG
|
|
|
++ sw s3, 0(t0)
|
|
|
++ fence
|
|
|
++
|
|
|
++ call rt_interrupt_leave /* 执行所有的中断函数后,调用该函数 */
|
|
|
++
|
|
|
++ /* 上面,将保存执行中断服务函数之前的CPU的sp寄存器到了s0所指向的位置处,当执行完中断服务函数,需要将之前的CPU寄存器,恢复一下,此时sp又变成了from thread的sp了 */
|
|
|
++ move sp, s0 /* sp = s0 */
|
|
|
++
|
|
|
++ /* 下面两句话,相当于将 rt_thread_switch_interrupt_flag 值,赋值给了s2 */
|
|
|
++ /* 将 rt_thread_switch_interrupt_flag 的地址值,赋值给 s0 寄存器*/
|
|
|
++ la s0, rt_thread_switch_interrupt_flag /* s0 = &rt_thread_switch_interrupt_flag */
|
|
|
++ /* 将 s0 所指向的地址处的内容,取出来,赋值给 s2 寄存器,其实就是将 rt_thread_switch_interrupt_flag 的值,赋值给了 s2 寄存器*/
|
|
|
++ lw s2, 0(s0) /* s2 = *s0 = rt_thread_switch_interrupt_flag */
|
|
|
++
|
|
|
++ /* 如果 s2的值,即 rt_thread_switch_interrupt_flag 值,如果不为0,则需要继续执行下一条指令,如果为0,则需要跳转到 spurious_interrupt 标号处 执行 */
|
|
|
++ /* 如果 s2的值等于0,rt_thread_switch_interrupt_flag等于0, 则不需要在中断处理函数中,进行上下文切换,反之则需要 */
|
|
|
++ /* 如果不需要上下文切换, */
|
|
|
++
|
|
|
++ /* 在这里,跳转到 spurious_interrupt的话,是不会进行上下文切换的,因为,此时CPU的sp指针还是from线程的*/
|
|
|
++ beqz s2, spurious_interrupt /* if (s2 == 0) goto spurious_interrupt; else 执行下一条语句*/
|
|
|
++
|
|
|
++ /* 需要上下文切换: 主要目的是将CPU的sp指针,赋值为to_thread的sp */
|
|
|
++
|
|
|
++ /* 将 s0 所执向的地址的内容设置为0, 也就是,将变量 rt_thread_switch_interrupt_flag 赋值为了 0 */
|
|
|
++ /* s0存放的值是 rt_thread_switch_interrupt_flag 变量的地址*/
|
|
|
++ sw zero, 0(s0) /* *s0 = 0; 也就是 rt_thread_switch_interrupt_flag = 0 */
|
|
|
++ /* 将 mepc 的值,赋值给 a0 寄存器,mepc 的值是,跳转到中断函数执行之前的 PC 指针 */
|
|
|
++ /* 这时的mpec其实,还是from线程,在跳转到中断执行前的一个PC地址 */
|
|
|
++ csrr a0, mepc /* a0 = mepc */
|
|
|
++
|
|
|
++ /* 将 mpec 的值写回到freom thread任务栈中的 epc 中,待后续,恢复from线程时,使用 */
|
|
|
++ STORE a0, 0 * REGBYTES(sp) /* from_thread->sp->epc = a0 ,中断入口处*/
|
|
|
++
|
|
|
++ /* 将from_thread的sp指针,赋值为CPU的sp指针 */
|
|
|
++ la s0, rt_interrupt_from_thread /* s0 = &rt_interrupt_from_thread 注意: rt_interrupt_from_thread = &(from_thread->sp) */
|
|
|
++ LOAD s1, 0(s0) /* s1 = rt_interrupt_from_thread,也就是s1 = &(from_thread->sp) */
|
|
|
++ STORE sp, 0(s1) /* from_thread->sp = sp*/
|
|
|
++
|
|
|
++ /* 接下来,需要开始恢复CPU的sp为to_thread的sp了 */
|
|
|
++ la s0, rt_interrupt_to_thread /* s0 = &rt_interrupt_to_thread 注意: rt_interrupt_to_thread = &(to_thred->sp)*/
|
|
|
++ LOAD s1, 0(s0) /* s1 = rt_interrupt_to_thread, 也就是s1 = &(to_thred->sp) */
|
|
|
++ LOAD sp, 0(s1) /* sp = (to_thred->sp)*/
|
|
|
++
|
|
|
++ /* 将CPU的 mepc设置为to_thred的mepc,待中断退出,执行mret指令后,将从该地址开始执行 */
|
|
|
++ LOAD a0, 0 * REGBYTES(sp) /* a0 = to_thread的mepc的值*/
|
|
|
++ csrw mepc, a0 /* mepc = a0 */
|
|
|
++
|
|
|
++
|
|
|
++spurious_interrupt:
|
|
|
++ LOAD x1, 1 * REGBYTES(sp)
|
|
|
++
|
|
|
++ /* Remain in M-mode after mret */
|
|
|
++ li t0, 0x00001800
|
|
|
++ csrs mstatus, t0
|
|
|
++ LOAD t0, 2 * REGBYTES(sp)
|
|
|
++ csrs mstatus, t0
|
|
|
++
|
|
|
++ LOAD x4, 4 * REGBYTES(sp)
|
|
|
++ LOAD x5, 5 * REGBYTES(sp)
|
|
|
++ LOAD x6, 6 * REGBYTES(sp)
|
|
|
++ LOAD x7, 7 * REGBYTES(sp)
|
|
|
++ LOAD x8, 8 * REGBYTES(sp)
|
|
|
++ LOAD x9, 9 * REGBYTES(sp)
|
|
|
++ LOAD x10, 10 * REGBYTES(sp)
|
|
|
++ LOAD x11, 11 * REGBYTES(sp)
|
|
|
++ LOAD x12, 12 * REGBYTES(sp)
|
|
|
++ LOAD x13, 13 * REGBYTES(sp)
|
|
|
++ LOAD x14, 14 * REGBYTES(sp)
|
|
|
++ LOAD x15, 15 * REGBYTES(sp)
|
|
|
++ LOAD x16, 16 * REGBYTES(sp)
|
|
|
++ LOAD x17, 17 * REGBYTES(sp)
|
|
|
++ LOAD x18, 18 * REGBYTES(sp)
|
|
|
++ LOAD x19, 19 * REGBYTES(sp)
|
|
|
++ LOAD x20, 20 * REGBYTES(sp)
|
|
|
++ LOAD x21, 21 * REGBYTES(sp)
|
|
|
++ LOAD x22, 22 * REGBYTES(sp)
|
|
|
++ LOAD x23, 23 * REGBYTES(sp)
|
|
|
++ LOAD x24, 24 * REGBYTES(sp)
|
|
|
++ LOAD x25, 25 * REGBYTES(sp)
|
|
|
++ LOAD x26, 26 * REGBYTES(sp)
|
|
|
++ LOAD x27, 27 * REGBYTES(sp)
|
|
|
++ LOAD x28, 28 * REGBYTES(sp)
|
|
|
++ LOAD x29, 29 * REGBYTES(sp)
|
|
|
++ LOAD x30, 30 * REGBYTES(sp)
|
|
|
++ LOAD x31, 31 * REGBYTES(sp)
|
|
|
++
|
|
|
++ addi sp, sp, 32 * REGBYTES
|
|
|
++ mret
|
|
|
++ .size _interrupt_handler, .-_interrupt_handler
|
|
|
++#endif
|
|
|
+--
|
|
|
+2.32.0 (Apple Git-132)
|
|
|
+
|
|
|
+
|
|
|
+From d0d1f625543282df462af56cc18abaa5a47d4f40 Mon Sep 17 00:00:00 2001
|
|
|
+From: supperthomas <78900636@qq.com>
|
|
|
+Date: Sat, 9 Jul 2022 21:37:53 +0800
|
|
|
+Subject: [PATCH 2/4] remove submodule
|
|
|
+
|
|
|
+remove submodule
|
|
|
+---
|
|
|
+ .gitmodules | 111 ----------------------------------------------------
|
|
|
+ 1 file changed, 111 deletions(-)
|
|
|
+
|
|
|
+diff --git a/.gitmodules b/.gitmodules
|
|
|
+index 49edc68e10..8b13789179 100644
|
|
|
+--- a/.gitmodules
|
|
|
++++ b/.gitmodules
|
|
|
+@@ -1,112 +1 @@
|
|
|
+-#
|
|
|
+-# All the relative URL paths are intended to be GitHub ones
|
|
|
+-# For Espressif's public projects please use '../../espressif/proj', not a '../proj'
|
|
|
+-#
|
|
|
+
|
|
|
+-[submodule "components/esptool_py/esptool"]
|
|
|
+- path = components/esptool_py/esptool
|
|
|
+- url = ../../espressif/esptool.git
|
|
|
+-
|
|
|
+-[submodule "components/bt/controller/lib_esp32"]
|
|
|
+- path = components/bt/controller/lib_esp32
|
|
|
+- url = ../../espressif/esp32-bt-lib.git
|
|
|
+-
|
|
|
+-[submodule "components/bootloader/subproject/components/micro-ecc/micro-ecc"]
|
|
|
+- path = components/bootloader/subproject/components/micro-ecc/micro-ecc
|
|
|
+- url = ../../kmackay/micro-ecc.git
|
|
|
+-
|
|
|
+-[submodule "components/coap/libcoap"]
|
|
|
+- path = components/coap/libcoap
|
|
|
+- url = ../../obgm/libcoap.git
|
|
|
+-
|
|
|
+-[submodule "components/nghttp/nghttp2"]
|
|
|
+- path = components/nghttp/nghttp2
|
|
|
+- url = ../../nghttp2/nghttp2.git
|
|
|
+-
|
|
|
+-[submodule "components/libsodium/libsodium"]
|
|
|
+- path = components/libsodium/libsodium
|
|
|
+- url = ../../jedisct1/libsodium.git
|
|
|
+-
|
|
|
+-[submodule "components/spiffs/spiffs"]
|
|
|
+- path = components/spiffs/spiffs
|
|
|
+- url = ../../pellepl/spiffs.git
|
|
|
+-
|
|
|
+-[submodule "components/json/cJSON"]
|
|
|
+- path = components/json/cJSON
|
|
|
+- url = ../../DaveGamble/cJSON.git
|
|
|
+-
|
|
|
+-[submodule "components/mbedtls/mbedtls"]
|
|
|
+- path = components/mbedtls/mbedtls
|
|
|
+- url = ../../espressif/mbedtls.git
|
|
|
+-
|
|
|
+-[submodule "components/asio/asio"]
|
|
|
+- path = components/asio/asio
|
|
|
+- url = ../../espressif/asio.git
|
|
|
+-
|
|
|
+-[submodule "components/expat/expat"]
|
|
|
+- path = components/expat/expat
|
|
|
+- url = ../../libexpat/libexpat.git
|
|
|
+-
|
|
|
+-[submodule "components/lwip/lwip"]
|
|
|
+- path = components/lwip/lwip
|
|
|
+- url = ../../espressif/esp-lwip.git
|
|
|
+-
|
|
|
+-[submodule "components/mqtt/esp-mqtt"]
|
|
|
+- path = components/mqtt/esp-mqtt
|
|
|
+- url = ../../espressif/esp-mqtt.git
|
|
|
+-
|
|
|
+-[submodule "components/protobuf-c/protobuf-c"]
|
|
|
+- path = components/protobuf-c/protobuf-c
|
|
|
+- url = ../../protobuf-c/protobuf-c.git
|
|
|
+-
|
|
|
+-[submodule "components/unity/unity"]
|
|
|
+- path = components/unity/unity
|
|
|
+- url = ../../ThrowTheSwitch/Unity.git
|
|
|
+-
|
|
|
+-[submodule "examples/build_system/cmake/import_lib/main/lib/tinyxml2"]
|
|
|
+- path = examples/build_system/cmake/import_lib/main/lib/tinyxml2
|
|
|
+- url = ../../leethomason/tinyxml2.git
|
|
|
+-
|
|
|
+-[submodule "components/bt/host/nimble/nimble"]
|
|
|
+- path = components/bt/host/nimble/nimble
|
|
|
+- url = ../../espressif/esp-nimble.git
|
|
|
+-
|
|
|
+-[submodule "components/cbor/tinycbor"]
|
|
|
+- path = components/cbor/tinycbor
|
|
|
+- url = ../../intel/tinycbor.git
|
|
|
+-
|
|
|
+-[submodule "components/esp_wifi/lib"]
|
|
|
+- path = components/esp_wifi/lib
|
|
|
+- url = ../../espressif/esp32-wifi-lib.git
|
|
|
+-
|
|
|
+-[submodule "components/tinyusb/tinyusb"]
|
|
|
+- path = components/tinyusb/tinyusb
|
|
|
+- url = ../../espressif/tinyusb.git
|
|
|
+-
|
|
|
+-[submodule "examples/peripherals/secure_element/atecc608_ecdsa/components/esp-cryptoauthlib"]
|
|
|
+- path = examples/peripherals/secure_element/atecc608_ecdsa/components/esp-cryptoauthlib
|
|
|
+- url = ../../espressif/esp-cryptoauthlib.git
|
|
|
+-
|
|
|
+-[submodule "components/cmock/CMock"]
|
|
|
+- path = components/cmock/CMock
|
|
|
+- url = ../../ThrowTheSwitch/CMock.git
|
|
|
+-
|
|
|
+-[submodule "components/openthread/openthread"]
|
|
|
+- path = components/openthread/openthread
|
|
|
+- url = ../../espressif/openthread.git
|
|
|
+-
|
|
|
+-[submodule "components/bt/controller/lib_esp32c3_family"]
|
|
|
+- path = components/bt/controller/lib_esp32c3_family
|
|
|
+- url = ../../espressif/esp32c3-bt-lib.git
|
|
|
+-
|
|
|
+-[submodule "components/esp_phy/lib"]
|
|
|
+- path = components/esp_phy/lib
|
|
|
+- url = ../../espressif/esp-phy-lib.git
|
|
|
+-
|
|
|
+-[submodule "components/openthread/lib"]
|
|
|
+- path = components/openthread/lib
|
|
|
+- url = ../../espressif/esp-thread-lib.git
|
|
|
+-
|
|
|
+-[submodule "components/ieee802154/lib"]
|
|
|
+- path = components/ieee802154/lib
|
|
|
+- url = ../../espressif/esp-ieee802154-lib.git
|
|
|
+--
|
|
|
+2.32.0 (Apple Git-132)
|
|
|
+
|
|
|
+
|
|
|
+From 29b9d1ebe7fe1c817428b856e208561ae0dc574b Mon Sep 17 00:00:00 2001
|
|
|
+From: tangzz98 <tangz98@outlook.com>
|
|
|
+Date: Sat, 30 Jul 2022 15:08:12 +0800
|
|
|
+Subject: [PATCH 3/4] Add FreeRTOS wrapper
|
|
|
+
|
|
|
+---
|
|
|
+ .../include/esp_serial_slave_link/essl.h | 2 +-
|
|
|
+ .../port/arch/riscv/expression_with_stack.c | 6 +
|
|
|
+ components/esp_system/startup.c | 12 +
|
|
|
+ components/freertos/CMakeLists.txt | 73 +-
|
|
|
+ .../FreeRTOS/esp_additions/task_snapshot.c | 212 ++
|
|
|
+ .../FreeRTOS/event_groups.c | 225 ++
|
|
|
+ .../FreeRTOS/freertos_v8_compat.c | 33 +
|
|
|
+ .../esp_additions/freertos/FreeRTOSConfig.h | 326 +++
|
|
|
+ .../esp_additions/freertos/task_snapshot.h | 90 +
|
|
|
+ .../FreeRTOS/include/freertos/FreeRTOS.h | 1198 +++++++++
|
|
|
+ .../FreeRTOS/include/freertos/event_groups.h | 621 +++++
|
|
|
+ .../FreeRTOS/include/freertos/list.h | 416 +++
|
|
|
+ .../FreeRTOS/include/freertos/portable.h | 141 +
|
|
|
+ .../FreeRTOS/include/freertos/projdefs.h | 64 +
|
|
|
+ .../FreeRTOS/include/freertos/queue.h | 1188 +++++++++
|
|
|
+ .../FreeRTOS/include/freertos/semphr.h | 1188 +++++++++
|
|
|
+ .../FreeRTOS/include/freertos/task.h | 2265 +++++++++++++++++
|
|
|
+ .../FreeRTOS/include/freertos/timers.h | 1185 +++++++++
|
|
|
+ .../FreeRTOS/list.c | 213 ++
|
|
|
+ .../FreeRTOS/port/MemMang/heap_1.c | 145 ++
|
|
|
+ .../FreeRTOS/port/MemMang/heap_2.c | 277 ++
|
|
|
+ .../FreeRTOS/port/MemMang/heap_3.c | 78 +
|
|
|
+ .../FreeRTOS/port/MemMang/heap_4.c | 447 ++++
|
|
|
+ .../FreeRTOS/port/MemMang/heap_5.c | 506 ++++
|
|
|
+ .../FreeRTOS/port/port_common.c | 203 ++
|
|
|
+ .../include/freertos/FreeRTOSConfig_arch.h | 105 +
|
|
|
+ .../rt-thread/include/freertos/portmacro.h | 107 +
|
|
|
+ .../include/freertos/portmacro_deprecated.h | 94 +
|
|
|
+ .../include/freertos/portmacro_esp32c3.h | 424 +++
|
|
|
+ .../FreeRTOS/port/rt-thread/port.c | 44 +
|
|
|
+ .../FreeRTOS/port/rt-thread/port_esp32c3.c | 197 ++
|
|
|
+ .../FreeRTOS/queue.c | 787 ++++++
|
|
|
+ .../FreeRTOS/tasks.c | 1254 +++++++++
|
|
|
+ .../FreeRTOS/timers.c | 328 +++
|
|
|
+ .../RT-Thread-wrapper-of-FreeRTOS/readme.md | 3 +
|
|
|
+ 35 files changed, 14436 insertions(+), 21 deletions(-)
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/esp_additions/task_snapshot.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/event_groups.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/freertos_v8_compat.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/FreeRTOSConfig.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/task_snapshot.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/FreeRTOS.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/event_groups.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/list.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/portable.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/projdefs.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/queue.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/semphr.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/task.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/timers.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/list.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_1.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_2.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_3.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_4.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_5.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/port_common.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/FreeRTOSConfig_arch.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_deprecated.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_esp32c3.h
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port_esp32c3.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/queue.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/tasks.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/timers.c
|
|
|
+ create mode 100644 components/freertos/RT-Thread-wrapper-of-FreeRTOS/readme.md
|
|
|
+
|
|
|
+diff --git a/components/esp_serial_slave_link/include/esp_serial_slave_link/essl.h b/components/esp_serial_slave_link/include/esp_serial_slave_link/essl.h
|
|
|
+index f03274a401..e9bc4939c0 100644
|
|
|
+--- a/components/esp_serial_slave_link/include/esp_serial_slave_link/essl.h
|
|
|
++++ b/components/esp_serial_slave_link/include/esp_serial_slave_link/essl.h
|
|
|
+@@ -160,7 +160,7 @@ esp_err_t essl_read_reg(essl_handle_t handle, uint8_t add, uint8_t *value_o, uin
|
|
|
+ * - ESP_ERR_NOT_SUPPORTED: Current device does not support this function.
|
|
|
+ * - ESP_ERR_TIMEOUT: No interrupts before timeout.
|
|
|
+ */
|
|
|
+-esp_err_t essl_wait_int(essl_handle_t handle, uint32_t wait_ms);
|
|
|
++esp_err_t essl_wait_int(essl_handle_t handle, TickType_t wait_ms);
|
|
|
+
|
|
|
+ /** Clear interrupt bits of ESSL slave. All the bits set in the mask will be cleared, while other bits will stay the same.
|
|
|
+ *
|
|
|
+diff --git a/components/esp_system/port/arch/riscv/expression_with_stack.c b/components/esp_system/port/arch/riscv/expression_with_stack.c
|
|
|
+index 07d22bf3aa..64c1e0689d 100644
|
|
|
+--- a/components/esp_system/port/arch/riscv/expression_with_stack.c
|
|
|
++++ b/components/esp_system/port/arch/riscv/expression_with_stack.c
|
|
|
+@@ -18,6 +18,7 @@
|
|
|
+ #include "freertos/FreeRTOS.h"
|
|
|
+ #include "freertos/portmacro.h"
|
|
|
+
|
|
|
++#if !defined CONFIG_IDF_RTOS_RTTHREAD
|
|
|
+ static portMUX_TYPE shared_stack_spinlock = portMUX_INITIALIZER_UNLOCKED;
|
|
|
+ static void *current_task_stack = NULL;
|
|
|
+
|
|
|
+@@ -45,10 +46,12 @@ static StackType_t *esp_switch_stack_setup(StackType_t *stack, size_t stack_size
|
|
|
+ #endif
|
|
|
+ return ((StackType_t *)adjusted_top_of_stack);
|
|
|
+ }
|
|
|
++#endif
|
|
|
+
|
|
|
+
|
|
|
+ void esp_execute_shared_stack_function(SemaphoreHandle_t lock, void *stack, size_t stack_size, shared_stack_function function)
|
|
|
+ {
|
|
|
++#if !defined CONFIG_IDF_RTOS_RTTHREAD
|
|
|
+ assert(lock);
|
|
|
+ assert(stack);
|
|
|
+ assert(stack_size > 0 && stack_size >= CONFIG_ESP_MINIMAL_SHARED_STACK_SIZE);
|
|
|
+@@ -70,4 +73,7 @@ void esp_execute_shared_stack_function(SemaphoreHandle_t lock, void *stack, size
|
|
|
+ portEXIT_CRITICAL(&shared_stack_spinlock);
|
|
|
+
|
|
|
+ xSemaphoreGive(lock);
|
|
|
++#else
|
|
|
++ function();
|
|
|
++#endif
|
|
|
+ }
|
|
|
+diff --git a/components/esp_system/startup.c b/components/esp_system/startup.c
|
|
|
+index 139ae8b6a2..6c6acdf575 100644
|
|
|
+--- a/components/esp_system/startup.c
|
|
|
++++ b/components/esp_system/startup.c
|
|
|
+@@ -56,6 +56,10 @@
|
|
|
+
|
|
|
+ #include "esp_rom_sys.h"
|
|
|
+
|
|
|
++#if CONFIG_IDF_RTOS_RTTHREAD
|
|
|
++#include "rtthread.h"
|
|
|
++#endif
|
|
|
++
|
|
|
+ // [refactor-todo] make this file completely target-independent
|
|
|
+ #if CONFIG_IDF_TARGET_ESP32
|
|
|
+ #include "esp32/clk.h"
|
|
|
+@@ -235,6 +239,14 @@ static void do_core_init(void)
|
|
|
+ app CPU, and when that is not up yet, the memory will be inaccessible and heap_caps_init may
|
|
|
+ fail initializing it properly. */
|
|
|
+ heap_caps_init();
|
|
|
++#if CONFIG_IDF_RTOS_RTTHREAD
|
|
|
++#if defined RT_USING_HEAP
|
|
|
++ extern int __heap_start__;
|
|
|
++ extern int __heap_end__;
|
|
|
++ rt_system_heap_init((void *)&__heap_start__, (void *)&__heap_end__);
|
|
|
++#endif
|
|
|
++ rt_system_scheduler_init();
|
|
|
++#endif
|
|
|
+
|
|
|
+ // When apptrace module is enabled, there will be SEGGER_SYSVIEW calls in the newlib init.
|
|
|
+ // SEGGER_SYSVIEW relies on apptrace module
|
|
|
+diff --git a/components/freertos/CMakeLists.txt b/components/freertos/CMakeLists.txt
|
|
|
+index bd5acf5a2f..8db7883df6 100644
|
|
|
+--- a/components/freertos/CMakeLists.txt
|
|
|
++++ b/components/freertos/CMakeLists.txt
|
|
|
+@@ -6,7 +6,29 @@ endif()
|
|
|
+
|
|
|
+ idf_build_get_property(target IDF_TARGET)
|
|
|
+
|
|
|
+-if(CONFIG_IDF_TARGET_ARCH_XTENSA)
|
|
|
++if(CONFIG_IDF_RTOS_RTTHREAD)
|
|
|
++ set(freertos_root "RT-Thread-wrapper-of-FreeRTOS/FreeRTOS")
|
|
|
++else()
|
|
|
++ set(freertos_root ".")
|
|
|
++endif()
|
|
|
++
|
|
|
++if(CONFIG_IDF_RTOS_RTTHREAD)
|
|
|
++ set(srcs
|
|
|
++ "${freertos_root}/port/rt-thread/port.c"
|
|
|
++ "${freertos_root}/port/rt-thread/port_esp32c3.c")
|
|
|
++
|
|
|
++ set(include_dirs
|
|
|
++ "${freertos_root}/include"
|
|
|
++ "${freertos_root}/include/esp_additions/freertos" # For files with #include "FreeRTOSConfig.h"
|
|
|
++ "${freertos_root}/port/rt-thread/include" # For including arch-specific FreeRTOSConfig_arch.h in port/<arch>/include
|
|
|
++ "${freertos_root}/include/esp_additions") # For files with #include "freertos/FreeRTOSConfig.h"
|
|
|
++
|
|
|
++ set(private_include_dirs
|
|
|
++ "${freertos_root}/port/rt-thread/include/freertos"
|
|
|
++ "${freertos_root}/port/rt-thread"
|
|
|
++ "${freertos_root}")
|
|
|
++
|
|
|
++elseif(CONFIG_IDF_TARGET_ARCH_XTENSA)
|
|
|
+ set(srcs
|
|
|
+ "port/xtensa/port.c"
|
|
|
+ "port/xtensa/portasm.S"
|
|
|
+@@ -48,21 +70,25 @@ elseif(CONFIG_IDF_TARGET_ARCH_RISCV)
|
|
|
+ endif()
|
|
|
+
|
|
|
+ list(APPEND srcs
|
|
|
+- "esp_additions/task_snapshot.c"
|
|
|
+- "port/port_common.c"
|
|
|
+- "port/port_systick.c"
|
|
|
+- "croutine.c"
|
|
|
+- "event_groups.c"
|
|
|
+- "list.c"
|
|
|
+- "queue.c"
|
|
|
+- "tasks.c"
|
|
|
+- "timers.c"
|
|
|
+- "stream_buffer.c"
|
|
|
+- "FreeRTOS-openocd.c"
|
|
|
+- "freertos_v8_compat.c")
|
|
|
++ "${freertos_root}/port/port_common.c"
|
|
|
++ "${freertos_root}/event_groups.c"
|
|
|
++ "${freertos_root}/queue.c"
|
|
|
++ "${freertos_root}/tasks.c"
|
|
|
++ "${freertos_root}/timers.c"
|
|
|
++ "${freertos_root}/list.c"
|
|
|
++ "${freertos_root}/freertos_v8_compat.c"
|
|
|
++ "${freertos_root}/esp_additions/task_snapshot.c")
|
|
|
++
|
|
|
++if(NOT CONFIG_IDF_RTOS_RTTHREAD)
|
|
|
++ list(APPEND srcs
|
|
|
++ "port/port_systick.c"
|
|
|
++ "croutine.c"
|
|
|
++ "stream_buffer.c"
|
|
|
++ "freertos_v8_compat.c")
|
|
|
++endif()
|
|
|
+
|
|
|
+ list(APPEND private_include_dirs
|
|
|
+- "include/freertos")
|
|
|
++ "${freertos_root}/include/freertos")
|
|
|
+
|
|
|
+ if(CONFIG_ESP32_IRAM_AS_8BIT_ACCESSIBLE_MEMORY)
|
|
|
+ list(APPEND srcs "port/xtensa/xtensa_loadstore_handler.S")
|
|
|
+@@ -71,7 +97,7 @@ endif()
|
|
|
+ # esp_timer is required by FreeRTOS because we use esp_tiemr_get_time() to do profiling
|
|
|
+ # app_trace is required by FreeRTOS headers only when CONFIG_APPTRACE_SV_ENABLE=y,
|
|
|
+ # REQUIRES can't depend on config options, so always require it.
|
|
|
+-set(required_components app_trace esp_timer)
|
|
|
++set(required_components app_trace esp_timer main)
|
|
|
+
|
|
|
+ idf_component_register(SRCS "${srcs}"
|
|
|
+ INCLUDE_DIRS ${include_dirs}
|
|
|
+@@ -88,15 +114,22 @@ if(CONFIG_FREERTOS_DEBUG_OCDAWARE)
|
|
|
+ endif()
|
|
|
+
|
|
|
+ set_source_files_properties(
|
|
|
+- tasks.c
|
|
|
+- event_groups.c
|
|
|
+- timers.c
|
|
|
+- queue.c
|
|
|
+- stream_buffer.c
|
|
|
++ "${freertos_root}/tasks.c"
|
|
|
++ "${freertos_root}/event_groups.c"
|
|
|
++ "${freertos_root}/timers.c"
|
|
|
++ "${freertos_root}/queue.c"
|
|
|
+ PROPERTIES COMPILE_DEFINITIONS
|
|
|
+ _ESP_FREERTOS_INTERNAL
|
|
|
+ )
|
|
|
+
|
|
|
++if(NOT CONFIG_IDF_RTOS_RTTHREAD)
|
|
|
++ set_source_files_properties(
|
|
|
++ stream_buffer.c
|
|
|
++ PROPERTIES COMPILE_DEFINITIONS
|
|
|
++ _ESP_FREERTOS_INTERNAL
|
|
|
++ )
|
|
|
++endif()
|
|
|
++
|
|
|
+ # The freertos component provides the `start_app` and `start_app_other_cores`
|
|
|
+ # if it is included in the build. It then calls `app_main`
|
|
|
+ # from the main task created, which must be provided by the user.
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/esp_additions/task_snapshot.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/esp_additions/task_snapshot.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..1244118b60
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/esp_additions/task_snapshot.c
|
|
|
+@@ -0,0 +1,212 @@
|
|
|
++/*
|
|
|
++ * SPDX-FileCopyrightText: 2017-2021 Espressif Systems (Shanghai) CO LTD
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: Apache-2.0
|
|
|
++ */
|
|
|
++
|
|
|
++#include "freertos/FreeRTOS.h"
|
|
|
++#include "freertos/task_snapshot.h"
|
|
|
++
|
|
|
++#ifndef DIM
|
|
|
++#define DIM(t) (sizeof(t)/ sizeof(*(t)))
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( configENABLE_TASK_SNAPSHOT == 1 )
|
|
|
++
|
|
|
++ static void prvTaskGetSnapshot( TaskSnapshot_t *pxTaskSnapshotArray, UBaseType_t *uxTask, void *pxTCB )
|
|
|
++ {
|
|
|
++ if (pxTCB == NULL) {
|
|
|
++ return;
|
|
|
++ }
|
|
|
++ pxTaskSnapshotArray[ *uxTask ].pxTCB = pxTCB;
|
|
|
++ pxTaskSnapshotArray[ *uxTask ].pxTopOfStack = (StackType_t *) pxTCBGetTopOfStack(pxTCB);
|
|
|
++ #if( portSTACK_GROWTH < 0 )
|
|
|
++ {
|
|
|
++ pxTaskSnapshotArray[ *uxTask ].pxEndOfStack = pxTCBGetEndOfStack(pxTCB);
|
|
|
++ }
|
|
|
++ #else
|
|
|
++ {
|
|
|
++ pxTaskSnapshotArray[ *uxTask ].pxEndOfStack = pxTCBGetStartOfStack(pxTCB);
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++ (*uxTask)++;
|
|
|
++ }
|
|
|
++
|
|
|
++ static void prvTaskGetSnapshotsFromList( TaskSnapshot_t *pxTaskSnapshotArray, UBaseType_t *uxTask, const UBaseType_t uxArraySize, List_t *pxList )
|
|
|
++ {
|
|
|
++ void *pxNextTCB = NULL;
|
|
|
++ void *pxFirstTCB = NULL;
|
|
|
++
|
|
|
++ if( listCURRENT_LIST_LENGTH( pxList ) > ( UBaseType_t ) 0 )
|
|
|
++ {
|
|
|
++ listGET_OWNER_OF_NEXT_ENTRY( pxFirstTCB, pxList );
|
|
|
++ do
|
|
|
++ {
|
|
|
++ if( *uxTask >= uxArraySize ) {
|
|
|
++ break;
|
|
|
++ }
|
|
|
++
|
|
|
++ listGET_OWNER_OF_NEXT_ENTRY( pxNextTCB, pxList );
|
|
|
++ prvTaskGetSnapshot( pxTaskSnapshotArray, uxTask, pxNextTCB );
|
|
|
++ } while( pxNextTCB != pxFirstTCB );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ mtCOVERAGE_TEST_MARKER();
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ UBaseType_t uxTaskGetSnapshotAll( TaskSnapshot_t * const pxTaskSnapshotArray, const UBaseType_t uxArraySize, UBaseType_t * const pxTcbSz )
|
|
|
++ {
|
|
|
++ UBaseType_t uxTask = 0;
|
|
|
++ UBaseType_t i = 0;
|
|
|
++
|
|
|
++
|
|
|
++ *pxTcbSz = pxTCBGetSize();
|
|
|
++ /* Fill in an TaskStatus_t structure with information on each
|
|
|
++ task in the Ready state. */
|
|
|
++ i = configMAX_PRIORITIES;
|
|
|
++ do
|
|
|
++ {
|
|
|
++ i--;
|
|
|
++ prvTaskGetSnapshotsFromList( pxTaskSnapshotArray, &uxTask, uxArraySize, pxListGetReadyTask(i) );
|
|
|
++ } while( i > ( UBaseType_t ) tskIDLE_PRIORITY ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
|
|
|
++
|
|
|
++ /* Fill in an TaskStatus_t structure with information on each
|
|
|
++ task in the Blocked state. */
|
|
|
++ prvTaskGetSnapshotsFromList( pxTaskSnapshotArray, &uxTask, uxArraySize, pxGetDelayedTaskList() );
|
|
|
++ prvTaskGetSnapshotsFromList( pxTaskSnapshotArray, &uxTask, uxArraySize, pxGetOverflowDelayedTaskList() );
|
|
|
++ for (i = 0; i < configNUM_CORES; i++) {
|
|
|
++ if( uxTask >= uxArraySize ) {
|
|
|
++ break;
|
|
|
++ }
|
|
|
++ prvTaskGetSnapshotsFromList( pxTaskSnapshotArray, &uxTask, uxArraySize, pxListGetReadyPendingTask(i) );
|
|
|
++ }
|
|
|
++
|
|
|
++ #if( INCLUDE_vTaskDelete == 1 )
|
|
|
++ {
|
|
|
++ prvTaskGetSnapshotsFromList( pxTaskSnapshotArray, &uxTask, uxArraySize, pxGetTasksWaitingTermination() );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ #if ( INCLUDE_vTaskSuspend == 1 )
|
|
|
++ {
|
|
|
++ prvTaskGetSnapshotsFromList( pxTaskSnapshotArray, &uxTask, uxArraySize, pxGetSuspendedTaskList() );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++ return uxTask;
|
|
|
++ }
|
|
|
++
|
|
|
++ static void *prvFirstTaskGet( List_t *pxList )
|
|
|
++ {
|
|
|
++ ListItem_t *pxListItem = listGET_HEAD_ENTRY( pxList );
|
|
|
++ if( pxListItem != listGET_END_MARKER( pxList ) ) {
|
|
|
++ return listGET_LIST_ITEM_OWNER( pxListItem );
|
|
|
++ }
|
|
|
++ return NULL;
|
|
|
++ }
|
|
|
++
|
|
|
++ static void *prvNextTaskGet( void *pxTCB )
|
|
|
++ {
|
|
|
++ List_t *pxList = listLIST_ITEM_CONTAINER( pxTCBGetStateListItem(pxTCB) );
|
|
|
++ ListItem_t *pxListItem = listGET_NEXT( pxTCBGetStateListItem(pxTCB) );
|
|
|
++ if( pxListItem != listGET_END_MARKER( pxList ) ) {
|
|
|
++ return listGET_LIST_ITEM_OWNER( pxListItem );
|
|
|
++ }
|
|
|
++ return NULL;
|
|
|
++ }
|
|
|
++
|
|
|
++ void vTaskGetSnapshot( TaskHandle_t pxTask, TaskSnapshot_t *pxTaskSnapshot )
|
|
|
++ {
|
|
|
++ configASSERT( portVALID_TCB_MEM(pxTask) );
|
|
|
++ configASSERT( pxTaskSnapshot != NULL );
|
|
|
++ pxTaskSnapshot->pxTCB = (void*) pxTask;
|
|
|
++ pxTaskSnapshot->pxTopOfStack = pxTCBGetTopOfStack((void*) pxTask);
|
|
|
++ pxTaskSnapshot->pxEndOfStack = pxTCBGetEndOfStack((void*) pxTask);
|
|
|
++ }
|
|
|
++
|
|
|
++ TaskHandle_t pxTaskGetNext( TaskHandle_t pxTask )
|
|
|
++ {
|
|
|
++ void *pxTCB = pxTask;
|
|
|
++ List_t *pxTaskList = NULL;
|
|
|
++ UBaseType_t i = configMAX_PRIORITIES;
|
|
|
++ UBaseType_t bCurTaskListFound = pdFALSE;
|
|
|
++ List_t *task_lists[] = {
|
|
|
++ pxGetDelayedTaskList(),
|
|
|
++ pxGetOverflowDelayedTaskList(),
|
|
|
++ #if( INCLUDE_vTaskDelete == 1 )
|
|
|
++ pxGetTasksWaitingTermination(),
|
|
|
++ #endif
|
|
|
++ #if( INCLUDE_vTaskSuspend == 1 )
|
|
|
++ pxGetSuspendedTaskList()
|
|
|
++ #endif
|
|
|
++ };
|
|
|
++
|
|
|
++ if( pxTask != NULL && !portVALID_TCB_MEM(pxTask) ) {
|
|
|
++ return NULL;
|
|
|
++ }
|
|
|
++
|
|
|
++ if( pxTCB != NULL ) {
|
|
|
++ pxTCB = prvNextTaskGet( pxTCB );
|
|
|
++ if( pxTCB != NULL ) {
|
|
|
++ // take care not to return garbage
|
|
|
++ return portVALID_TCB_MEM(pxTCB) ? pxTCB : NULL;
|
|
|
++ }
|
|
|
++ pxTaskList = listLIST_ITEM_CONTAINER( pxTCBGetStateListItem(pxTask) );
|
|
|
++ }
|
|
|
++ /* ready tasks lists */
|
|
|
++ do
|
|
|
++ {
|
|
|
++ i--;
|
|
|
++ List_t *pxList = pxListGetReadyTask(i);
|
|
|
++ if( bCurTaskListFound == pdFALSE && pxTaskList != NULL ) {
|
|
|
++ /* need to find list the current task item from */
|
|
|
++ if( pxTaskList == pxList ) {
|
|
|
++ bCurTaskListFound = pdTRUE;
|
|
|
++ }
|
|
|
++ continue; /* go to the next 'ready list' */
|
|
|
++ }
|
|
|
++ pxTCB = prvFirstTaskGet( pxList );
|
|
|
++ if( pxTCB != NULL ) {
|
|
|
++ // take care not to return garbage
|
|
|
++ return portVALID_TCB_MEM(pxTCB) ? pxTCB : NULL;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ while( i > tskIDLE_PRIORITY );
|
|
|
++ /* pending ready tasks lists */
|
|
|
++ for (i = 0; i < configNUM_CORES; i++) {
|
|
|
++ List_t *pxList = pxListGetReadyPendingTask(i);
|
|
|
++ if( bCurTaskListFound == pdFALSE && pxTaskList != NULL ) {
|
|
|
++ /* need to find list the current task item from */
|
|
|
++ if( pxTaskList == pxList ) {
|
|
|
++ bCurTaskListFound = pdTRUE;
|
|
|
++ }
|
|
|
++ continue; /* go to the next 'ready list' */
|
|
|
++ }
|
|
|
++ pxTCB = prvFirstTaskGet( pxList );
|
|
|
++ if( pxTCB != NULL ) {
|
|
|
++ // take care not to return garbage
|
|
|
++ return portVALID_TCB_MEM(pxTCB) ? pxTCB : NULL;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ /* other tasks lists */
|
|
|
++ for (i = 0; i < DIM(task_lists); i++) {
|
|
|
++ List_t *pxList = task_lists[ i ];
|
|
|
++ if( bCurTaskListFound == pdFALSE && pxTaskList != NULL ) {
|
|
|
++ /* need to find list the current task item from */
|
|
|
++ if( pxTaskList == pxList ) {
|
|
|
++ bCurTaskListFound = pdTRUE;
|
|
|
++ }
|
|
|
++ continue; /* go to the next 'ready list' */
|
|
|
++ }
|
|
|
++ pxTCB = prvFirstTaskGet( pxList );
|
|
|
++ if( pxTCB != NULL ) {
|
|
|
++ // take care not to return garbage
|
|
|
++ return portVALID_TCB_MEM(pxTCB) ? pxTCB : NULL;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ return NULL;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/event_groups.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/event_groups.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..1b708564ed
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/event_groups.c
|
|
|
+@@ -0,0 +1,225 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/* Standard includes. */
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++/* FreeRTOS includes. */
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++#include "event_groups.h"
|
|
|
++
|
|
|
++typedef struct EventGroupDef_t
|
|
|
++{
|
|
|
++ struct rt_event event;
|
|
|
++} EventGroup_t;
|
|
|
++
|
|
|
++static volatile rt_uint8_t event_index = 0;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ EventGroupHandle_t xEventGroupCreateStatic( StaticEventGroup_t * pxEventGroupBuffer )
|
|
|
++ {
|
|
|
++ char name[RT_NAME_MAX] = {0};
|
|
|
++
|
|
|
++ /* A StaticEventGroup_t object must be provided. */
|
|
|
++ configASSERT( pxEventGroupBuffer );
|
|
|
++
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "event%02d", event_index++ );
|
|
|
++ rt_event_init( ( rt_event_t ) pxEventGroupBuffer, name, RT_IPC_FLAG_PRIO );
|
|
|
++
|
|
|
++ return ( EventGroupHandle_t ) pxEventGroupBuffer;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ EventGroupHandle_t xEventGroupCreate( void )
|
|
|
++ {
|
|
|
++ EventGroup_t * pxEventBits;
|
|
|
++ char name[RT_NAME_MAX] = {0};
|
|
|
++
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "event%02d", event_index++ );
|
|
|
++ pxEventBits = ( EventGroup_t * ) rt_event_create( name, RT_IPC_FLAG_PRIO );
|
|
|
++
|
|
|
++ return pxEventBits;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configSUPPORT_DYNAMIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToWaitFor,
|
|
|
++ const BaseType_t xClearOnExit,
|
|
|
++ const BaseType_t xWaitForAllBits,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++{
|
|
|
++ rt_event_t event = ( rt_event_t ) xEventGroup;
|
|
|
++ rt_uint8_t option = 0;
|
|
|
++ rt_uint32_t recved;
|
|
|
++ rt_base_t level;
|
|
|
++ rt_err_t err;
|
|
|
++
|
|
|
++ /* Check the user is not attempting to wait on the bits used by the kernel
|
|
|
++ * itself, and that at least one bit is being requested. */
|
|
|
++ configASSERT( xEventGroup );
|
|
|
++ configASSERT( uxBitsToWaitFor != 0 );
|
|
|
++ #if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
|
|
|
++ {
|
|
|
++ configASSERT( !( ( xTaskGetSchedulerState() == taskSCHEDULER_SUSPENDED ) && ( xTicksToWait != 0 ) ) );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ if ( xWaitForAllBits != pdFALSE )
|
|
|
++ {
|
|
|
++ option |= RT_EVENT_FLAG_AND;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ option |= RT_EVENT_FLAG_OR;
|
|
|
++ }
|
|
|
++ if ( xClearOnExit != pdFALSE )
|
|
|
++ {
|
|
|
++ option |= RT_EVENT_FLAG_CLEAR;
|
|
|
++ }
|
|
|
++ err = rt_event_recv( event, ( rt_uint32_t ) uxBitsToWaitFor, option, ( rt_int32_t ) xTicksToWait, &recved );
|
|
|
++
|
|
|
++ if ( err != RT_EOK )
|
|
|
++ {
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ recved = event->set;
|
|
|
++ rt_hw_interrupt_enable(level);
|
|
|
++ }
|
|
|
++
|
|
|
++ return ( EventBits_t ) recved;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++EventBits_t xEventGroupClearBits( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToClear )
|
|
|
++{
|
|
|
++ rt_event_t event = ( rt_event_t ) xEventGroup;
|
|
|
++ EventBits_t uxReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xEventGroup );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ uxReturn = ( EventBits_t ) event->set;
|
|
|
++ event->set &= ~( ( rt_uint32_t ) uxBitsToClear );
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xEventGroupClearBitsFromISR( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToClear )
|
|
|
++{
|
|
|
++ return xEventGroupClearBits( xEventGroup, uxBitsToClear );
|
|
|
++}
|
|
|
++
|
|
|
++EventBits_t xEventGroupGetBitsFromISR( EventGroupHandle_t xEventGroup )
|
|
|
++{
|
|
|
++ rt_event_t event = ( rt_event_t ) xEventGroup;
|
|
|
++ EventBits_t uxReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ uxReturn = ( EventBits_t ) event->set;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToSet )
|
|
|
++{
|
|
|
++ rt_event_t event = ( rt_event_t ) xEventGroup;
|
|
|
++ rt_base_t level;
|
|
|
++ EventBits_t uxReturn;
|
|
|
++
|
|
|
++ configASSERT( xEventGroup );
|
|
|
++
|
|
|
++ rt_event_send( event, ( rt_uint32_t ) uxBitsToSet);
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ uxReturn = ( EventBits_t ) event->set;
|
|
|
++ rt_hw_interrupt_enable(level);
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vEventGroupDelete( EventGroupHandle_t xEventGroup )
|
|
|
++{
|
|
|
++ rt_event_t event = ( rt_event_t ) xEventGroup;
|
|
|
++
|
|
|
++ configASSERT( xEventGroup );
|
|
|
++
|
|
|
++#if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ if ( rt_object_is_systemobject( ( rt_object_t ) event ) )
|
|
|
++#endif
|
|
|
++ {
|
|
|
++ #if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ rt_event_detach( event );
|
|
|
++ #endif
|
|
|
++#if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++#endif
|
|
|
++ #if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ rt_event_delete( event );
|
|
|
++ #endif
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_TRACE_FACILITY == 1 ) && ( INCLUDE_xTimerPendFunctionCall == 1 ) && ( configUSE_TIMERS == 1 ) )
|
|
|
++
|
|
|
++ BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToSet,
|
|
|
++ BaseType_t * pxHigherPriorityTaskWoken )
|
|
|
++ {
|
|
|
++ xEventGroupSetBits( xEventGroup, uxBitsToSet );
|
|
|
++ if ( pxHigherPriorityTaskWoken != NULL)
|
|
|
++ {
|
|
|
++ pxHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return pdPASS;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* if ( ( configUSE_TRACE_FACILITY == 1 ) && ( INCLUDE_xTimerPendFunctionCall == 1 ) && ( configUSE_TIMERS == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/freertos_v8_compat.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/freertos_v8_compat.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..fe8d689125
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/freertos_v8_compat.c
|
|
|
+@@ -0,0 +1,33 @@
|
|
|
++// Copyright 2020 Espressif Systems (Shanghai) Co., Ltd.
|
|
|
++//
|
|
|
++// Licensed under the Apache License, Version 2.0 (the "License");
|
|
|
++// you may not use this file except in compliance with the License.
|
|
|
++// You may obtain a copy of the License at
|
|
|
++//
|
|
|
++// http://www.apache.org/licenses/LICENSE-2.0
|
|
|
++//
|
|
|
++// Unless required by applicable law or agreed to in writing, software
|
|
|
++// distributed under the License is distributed on an "AS IS" BASIS,
|
|
|
++// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
|
|
++// See the License for the specific language governing permissions and
|
|
|
++// limitations under the License.
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "queue.h"
|
|
|
++#include "semphr.h"
|
|
|
++
|
|
|
++/* This API is kept for backward ABI compatibility with prebuilt libraries against FreeRTOS v8/v9 in ESP-IDF */
|
|
|
++BaseType_t xQueueGenericReceive( QueueHandle_t xQueue, void * const pvBuffer, TickType_t xTicksToWait, const BaseType_t xPeek )
|
|
|
++{
|
|
|
++ if ( xPeek == pdTRUE )
|
|
|
++ {
|
|
|
++ return xQueuePeek( xQueue, pvBuffer, xTicksToWait );
|
|
|
++ }
|
|
|
++
|
|
|
++ if ( pvBuffer == NULL )
|
|
|
++ {
|
|
|
++ return xQueueSemaphoreTake( xQueue, xTicksToWait );
|
|
|
++ }
|
|
|
++
|
|
|
++ return xQueueReceive( xQueue, pvBuffer, xTicksToWait );
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/FreeRTOSConfig.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/FreeRTOSConfig.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..8a4739a3a5
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/FreeRTOSConfig.h
|
|
|
+@@ -0,0 +1,326 @@
|
|
|
++/*
|
|
|
++ FreeRTOS V10 - Copyright (C) 2021 Real Time Engineers Ltd.
|
|
|
++ All rights reserved
|
|
|
++
|
|
|
++ VISIT http://www.FreeRTOS.org TO ENSURE YOU ARE USING THE LATEST VERSION.
|
|
|
++
|
|
|
++ This file is part of the FreeRTOS distribution.
|
|
|
++
|
|
|
++ FreeRTOS is free software; you can redistribute it and/or modify it under
|
|
|
++ the terms of the GNU General Public License (version 2) as published by the
|
|
|
++ Free Software Foundation >>!AND MODIFIED BY!<< the FreeRTOS exception.
|
|
|
++
|
|
|
++ ***************************************************************************
|
|
|
++ >>! NOTE: The modification to the GPL is included to allow you to !<<
|
|
|
++ >>! distribute a combined work that includes FreeRTOS without being !<<
|
|
|
++ >>! obliged to provide the source code for proprietary components !<<
|
|
|
++ >>! outside of the FreeRTOS kernel. !<<
|
|
|
++ ***************************************************************************
|
|
|
++
|
|
|
++ FreeRTOS is distributed in the hope that it will be useful, but WITHOUT ANY
|
|
|
++ WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS
|
|
|
++ FOR A PARTICULAR PURPOSE. Full license text is available on the following
|
|
|
++ link: http://www.freertos.org/a00114.html
|
|
|
++
|
|
|
++ ***************************************************************************
|
|
|
++ * *
|
|
|
++ * FreeRTOS provides completely free yet professionally developed, *
|
|
|
++ * robust, strictly quality controlled, supported, and cross *
|
|
|
++ * platform software that is more than just the market leader, it *
|
|
|
++ * is the industry's de facto standard. *
|
|
|
++ * *
|
|
|
++ * Help yourself get started quickly while simultaneously helping *
|
|
|
++ * to support the FreeRTOS project by purchasing a FreeRTOS *
|
|
|
++ * tutorial book, reference manual, or both: *
|
|
|
++ * http://www.FreeRTOS.org/Documentation *
|
|
|
++ * *
|
|
|
++ ***************************************************************************
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/FAQHelp.html - Having a problem? Start by reading
|
|
|
++ the FAQ page "My application does not run, what could be wrong?". Have you
|
|
|
++ defined configASSERT()?
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/support - In return for receiving this top quality
|
|
|
++ embedded software for free we request you assist our global community by
|
|
|
++ participating in the support forum.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/training - Investing in training allows your team to
|
|
|
++ be as productive as possible as early as possible. Now you can receive
|
|
|
++ FreeRTOS training directly from Richard Barry, CEO of Real Time Engineers
|
|
|
++ Ltd, and the world's leading authority on the world's leading RTOS.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,
|
|
|
++ including FreeRTOS+Trace - an indispensable productivity tool, a DOS
|
|
|
++ compatible FAT file system, and our tiny thread aware UDP/IP stack.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.
|
|
|
++ Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.
|
|
|
++
|
|
|
++ http://www.OpenRTOS.com - Real Time Engineers ltd. license FreeRTOS to High
|
|
|
++ Integrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOS
|
|
|
++ licenses offer ticketed support, indemnification and commercial middleware.
|
|
|
++
|
|
|
++ http://www.SafeRTOS.com - High Integrity Systems also provide a safety
|
|
|
++ engineered and independently SIL3 certified version for use in safety and
|
|
|
++ mission critical applications that require provable dependability.
|
|
|
++
|
|
|
++ 1 tab == 4 spaces!
|
|
|
++*/
|
|
|
++
|
|
|
++#ifndef FREERTOS_CONFIG_H
|
|
|
++#define FREERTOS_CONFIG_H
|
|
|
++
|
|
|
++#include "sdkconfig.h"
|
|
|
++
|
|
|
++/* for likely and unlikely */
|
|
|
++#include "esp_compiler.h"
|
|
|
++
|
|
|
++// The arch-specific FreeRTOSConfig_arch.h in port/<arch>/include.
|
|
|
++#include "freertos/FreeRTOSConfig_arch.h"
|
|
|
++
|
|
|
++#if !(defined(FREERTOS_CONFIG_XTENSA_H) \
|
|
|
++ || defined(FREERTOS_CONFIG_RISCV_H) \
|
|
|
++ || defined(FREERTOS_CONFIG_LINUX_H))
|
|
|
++#error "Needs architecture-speific FreeRTOSConfig.h!"
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef CONFIG_FREERTOS_UNICORE
|
|
|
++#define portNUM_PROCESSORS 2
|
|
|
++#else
|
|
|
++#define portNUM_PROCESSORS 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#define portUSING_MPU_WRAPPERS 0
|
|
|
++#define configUSE_MUTEX 1
|
|
|
++
|
|
|
++#define configNUM_THREAD_LOCAL_STORAGE_POINTERS CONFIG_FREERTOS_THREAD_LOCAL_STORAGE_POINTERS
|
|
|
++#define configTHREAD_LOCAL_STORAGE_DELETE_CALLBACKS 1
|
|
|
++
|
|
|
++/* configASSERT behaviour */
|
|
|
++#ifndef __ASSEMBLER__
|
|
|
++#include <assert.h>
|
|
|
++
|
|
|
++// If CONFIG_FREERTOS_ASSERT_DISABLE is set then configASSERT is defined empty later in FreeRTOS.h and the macro
|
|
|
++// configASSERT_DEFINED remains unset (meaning some warnings are avoided)
|
|
|
++
|
|
|
++#if defined(CONFIG_FREERTOS_ASSERT_FAIL_PRINT_CONTINUE)
|
|
|
++#define configASSERT(a) if (unlikely(!(a))) { \
|
|
|
++ esp_rom_printf("%s:%d (%s)- assert failed!\n", __FILE__, __LINE__, \
|
|
|
++ __FUNCTION__); \
|
|
|
++ }
|
|
|
++#elif defined(CONFIG_FREERTOS_ASSERT_FAIL_ABORT)
|
|
|
++#define configASSERT(a) assert(a)
|
|
|
++#endif
|
|
|
++
|
|
|
++#if CONFIG_FREERTOS_ASSERT_ON_UNTESTED_FUNCTION
|
|
|
++#define UNTESTED_FUNCTION() { esp_rom_printf("Untested FreeRTOS function %s\r\n", __FUNCTION__); configASSERT(false); } while(0)
|
|
|
++#else
|
|
|
++#define UNTESTED_FUNCTION()
|
|
|
++#endif
|
|
|
++
|
|
|
++#endif /* def __ASSEMBLER__ */
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++ * Application specific definitions.
|
|
|
++ *
|
|
|
++ * These definitions should be adjusted for your particular hardware and
|
|
|
++ * application requirements.
|
|
|
++ *
|
|
|
++ * Note that the default heap size is deliberately kept small so that
|
|
|
++ * the build is more likely to succeed for configurations with limited
|
|
|
++ * memory.
|
|
|
++ *
|
|
|
++ * THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
|
|
|
++ * FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
|
|
|
++ *----------------------------------------------------------*/
|
|
|
++
|
|
|
++#define configUSE_PREEMPTION 1
|
|
|
++#define configUSE_IDLE_HOOK 1
|
|
|
++#define configUSE_TICK_HOOK 1
|
|
|
++#define configRECORD_STACK_HIGH_ADDRESS 1
|
|
|
++#define configTICK_RATE_HZ ( CONFIG_FREERTOS_HZ )
|
|
|
++
|
|
|
++/* This has impact on speed of search for highest priority */
|
|
|
++#define configMAX_PRIORITIES ( 32 )
|
|
|
++
|
|
|
++/* Various things that impact minimum stack sizes */
|
|
|
++
|
|
|
++/* Higher stack checker modes cause overhead on each function call */
|
|
|
++#if CONFIG_STACK_CHECK_ALL || CONFIG_STACK_CHECK_STRONG
|
|
|
++#define configSTACK_OVERHEAD_CHECKER 256
|
|
|
++#else
|
|
|
++#define configSTACK_OVERHEAD_CHECKER 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* with optimizations disabled, scheduler uses additional stack */
|
|
|
++#if CONFIG_COMPILER_OPTIMIZATION_NONE
|
|
|
++#define configSTACK_OVERHEAD_OPTIMIZATION 320
|
|
|
++#else
|
|
|
++#define configSTACK_OVERHEAD_OPTIMIZATION 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* apptrace mdule increases minimum stack usage */
|
|
|
++#if CONFIG_APPTRACE_ENABLE
|
|
|
++#define configSTACK_OVERHEAD_APPTRACE 1280
|
|
|
++#else
|
|
|
++#define configSTACK_OVERHEAD_APPTRACE 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Stack watchpoint decreases minimum usable stack size by up to 60 bytes.
|
|
|
++ See FreeRTOS FREERTOS_WATCHPOINT_END_OF_STACK option in Kconfig. */
|
|
|
++#if CONFIG_FREERTOS_WATCHPOINT_END_OF_STACK
|
|
|
++#define configSTACK_OVERHEAD_WATCHPOINT 60
|
|
|
++#else
|
|
|
++#define configSTACK_OVERHEAD_WATCHPOINT 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#define configSTACK_OVERHEAD_TOTAL ( \
|
|
|
++ configSTACK_OVERHEAD_CHECKER + \
|
|
|
++ configSTACK_OVERHEAD_OPTIMIZATION + \
|
|
|
++ configSTACK_OVERHEAD_APPTRACE + \
|
|
|
++ configSTACK_OVERHEAD_WATCHPOINT \
|
|
|
++ )
|
|
|
++
|
|
|
++#define configMINIMAL_STACK_SIZE (768 + configSTACK_OVERHEAD_TOTAL)
|
|
|
++
|
|
|
++#ifndef configIDLE_TASK_STACK_SIZE
|
|
|
++#define configIDLE_TASK_STACK_SIZE CONFIG_FREERTOS_IDLE_TASK_STACKSIZE
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Minimal heap size to make sure examples can run on memory limited
|
|
|
++ configs. Adjust this to suit your system. */
|
|
|
++
|
|
|
++
|
|
|
++//We define the heap to span all of the non-statically-allocated shared RAM. ToDo: Make sure there
|
|
|
++//is some space left for the app and main cpu when running outside of a thread.
|
|
|
++#define configAPPLICATION_ALLOCATED_HEAP 1
|
|
|
++#define configTOTAL_HEAP_SIZE (&_heap_end - &_heap_start)//( ( size_t ) (64 * 1024) )
|
|
|
++
|
|
|
++#define configMAX_TASK_NAME_LEN ( CONFIG_FREERTOS_MAX_TASK_NAME_LEN )
|
|
|
++
|
|
|
++#ifdef CONFIG_FREERTOS_USE_TRACE_FACILITY
|
|
|
++#define configUSE_TRACE_FACILITY 1 /* Used by uxTaskGetSystemState(), and other trace facility functions */
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef CONFIG_FREERTOS_USE_STATS_FORMATTING_FUNCTIONS
|
|
|
++#define configUSE_STATS_FORMATTING_FUNCTIONS 1 /* Used by vTaskList() */
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef CONFIG_FREERTOS_VTASKLIST_INCLUDE_COREID
|
|
|
++#define configTASKLIST_INCLUDE_COREID 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef CONFIG_FREERTOS_GENERATE_RUN_TIME_STATS
|
|
|
++#define configGENERATE_RUN_TIME_STATS 1 /* Used by vTaskGetRunTimeStats() */
|
|
|
++#endif
|
|
|
++
|
|
|
++#define configBENCHMARK 0
|
|
|
++#define configUSE_16_BIT_TICKS 0
|
|
|
++#define configIDLE_SHOULD_YIELD 0
|
|
|
++#define configQUEUE_REGISTRY_SIZE CONFIG_FREERTOS_QUEUE_REGISTRY_SIZE
|
|
|
++
|
|
|
++#define configUSE_MUTEXES 1
|
|
|
++#define configUSE_RECURSIVE_MUTEXES 1
|
|
|
++#define configUSE_COUNTING_SEMAPHORES 1
|
|
|
++
|
|
|
++#if CONFIG_FREERTOS_CHECK_STACKOVERFLOW_NONE
|
|
|
++#define configCHECK_FOR_STACK_OVERFLOW 0
|
|
|
++#elif CONFIG_FREERTOS_CHECK_STACKOVERFLOW_PTRVAL
|
|
|
++#define configCHECK_FOR_STACK_OVERFLOW 1
|
|
|
++#elif CONFIG_FREERTOS_CHECK_STACKOVERFLOW_CANARY
|
|
|
++#define configCHECK_FOR_STACK_OVERFLOW 2
|
|
|
++#endif
|
|
|
++
|
|
|
++
|
|
|
++/* Co-routine definitions. */
|
|
|
++#define configUSE_CO_ROUTINES 0
|
|
|
++#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
|
|
|
++
|
|
|
++/* Set the following definitions to 1 to include the API function, or zero
|
|
|
++ to exclude the API function. */
|
|
|
++
|
|
|
++#define INCLUDE_vTaskPrioritySet 1
|
|
|
++#define INCLUDE_uxTaskPriorityGet 1
|
|
|
++#define INCLUDE_vTaskDelete 1
|
|
|
++#define INCLUDE_vTaskCleanUpResources 0
|
|
|
++#define INCLUDE_vTaskSuspend 1
|
|
|
++#define INCLUDE_vTaskDelayUntil 1
|
|
|
++#define INCLUDE_vTaskDelay 1
|
|
|
++#define INCLUDE_uxTaskGetStackHighWaterMark 1
|
|
|
++#define INCLUDE_pcTaskGetTaskName 1
|
|
|
++#define INCLUDE_xTaskGetIdleTaskHandle 1
|
|
|
++#define INCLUDE_pxTaskGetStackStart 1
|
|
|
++#define INCLUDE_eTaskGetState 1
|
|
|
++#define INCLUDE_xTaskAbortDelay 1
|
|
|
++#define INCLUDE_xTaskGetHandle 1
|
|
|
++#define INCLUDE_xSemaphoreGetMutexHolder 1
|
|
|
++#define INCLUDE_xTimerPendFunctionCall 1
|
|
|
++#define INCLUDE_xTimerGetTimerDaemonTaskHandle 0 //Currently there is no need for this API
|
|
|
++
|
|
|
++/* The priority at which the tick interrupt runs. This should probably be
|
|
|
++ kept at 1. */
|
|
|
++#define configKERNEL_INTERRUPT_PRIORITY 1
|
|
|
++
|
|
|
++#if !CONFIG_IDF_TARGET_LINUX
|
|
|
++#define configUSE_NEWLIB_REENTRANT 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#define configSUPPORT_DYNAMIC_ALLOCATION 1
|
|
|
++#define configSUPPORT_STATIC_ALLOCATION 1
|
|
|
++
|
|
|
++#ifndef __ASSEMBLER__
|
|
|
++#if CONFIG_FREERTOS_ENABLE_STATIC_TASK_CLEAN_UP
|
|
|
++extern void vPortCleanUpTCB ( void *pxTCB );
|
|
|
++#define portCLEAN_UP_TCB( pxTCB ) vPortCleanUpTCB( pxTCB )
|
|
|
++#endif
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Test FreeRTOS timers (with timer task) and more. */
|
|
|
++/* Some files don't compile if this flag is disabled */
|
|
|
++#define configUSE_TIMERS 1
|
|
|
++#define configTIMER_TASK_PRIORITY CONFIG_FREERTOS_TIMER_TASK_PRIORITY
|
|
|
++#define configTIMER_QUEUE_LENGTH CONFIG_FREERTOS_TIMER_QUEUE_LENGTH
|
|
|
++#define configTIMER_TASK_STACK_DEPTH CONFIG_FREERTOS_TIMER_TASK_STACK_DEPTH
|
|
|
++
|
|
|
++#define configUSE_QUEUE_SETS 1
|
|
|
++
|
|
|
++#define configUSE_TICKLESS_IDLE CONFIG_FREERTOS_USE_TICKLESS_IDLE
|
|
|
++#if configUSE_TICKLESS_IDLE
|
|
|
++#define configEXPECTED_IDLE_TIME_BEFORE_SLEEP CONFIG_FREERTOS_IDLE_TIME_BEFORE_SLEEP
|
|
|
++#endif //configUSE_TICKLESS_IDLE
|
|
|
++
|
|
|
++
|
|
|
++#if CONFIG_FREERTOS_ENABLE_TASK_SNAPSHOT
|
|
|
++#define configENABLE_TASK_SNAPSHOT 1
|
|
|
++#endif
|
|
|
++#ifndef configENABLE_TASK_SNAPSHOT
|
|
|
++#define configENABLE_TASK_SNAPSHOT 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#if CONFIG_SYSVIEW_ENABLE
|
|
|
++#ifndef __ASSEMBLER__
|
|
|
++#include "SEGGER_SYSVIEW_FreeRTOS.h"
|
|
|
++#undef INLINE // to avoid redefinition
|
|
|
++#endif /* def __ASSEMBLER__ */
|
|
|
++#endif
|
|
|
++
|
|
|
++#if CONFIG_FREERTOS_CHECK_MUTEX_GIVEN_BY_OWNER
|
|
|
++#define configCHECK_MUTEX_GIVEN_BY_OWNER 1
|
|
|
++#else
|
|
|
++#define configCHECK_MUTEX_GIVEN_BY_OWNER 0
|
|
|
++#endif
|
|
|
++
|
|
|
++
|
|
|
++#define configINCLUDE_FREERTOS_TASK_C_ADDITIONS_H 1
|
|
|
++
|
|
|
++#define configTASK_NOTIFICATION_ARRAY_ENTRIES 1
|
|
|
++
|
|
|
++// backward compatibility for 4.4
|
|
|
++#define xTaskRemoveFromUnorderedEventList vTaskRemoveFromUnorderedEventList
|
|
|
++
|
|
|
++#define configNUM_CORES portNUM_PROCESSORS
|
|
|
++
|
|
|
++/* RT-Thread wrapper */
|
|
|
++#define INCLUDE_xTaskGetCurrentTaskHandle 1
|
|
|
++
|
|
|
++#endif /* FREERTOS_CONFIG_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/task_snapshot.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/task_snapshot.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..1ad04cce69
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/esp_additions/freertos/task_snapshot.h
|
|
|
+@@ -0,0 +1,90 @@
|
|
|
++// Copyright 2015-2021 Espressif Systems (Shanghai) PTE LTD
|
|
|
++//
|
|
|
++// Licensed under the Apache License, Version 2.0 (the "License");
|
|
|
++// you may not use this file except in compliance with the License.
|
|
|
++// You may obtain a copy of the License at
|
|
|
++//
|
|
|
++// http://www.apache.org/licenses/LICENSE-2.0
|
|
|
++//
|
|
|
++// Unless required by applicable law or agreed to in writing, software
|
|
|
++// distributed under the License is distributed on an "AS IS" BASIS,
|
|
|
++// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
|
|
++// See the License for the specific language governing permissions and
|
|
|
++// limitations under the License.
|
|
|
++
|
|
|
++#pragma once
|
|
|
++
|
|
|
++#include "freertos/FreeRTOS.h"
|
|
|
++#include "freertos/task.h"
|
|
|
++
|
|
|
++#if ( configENABLE_TASK_SNAPSHOT == 1 )
|
|
|
++
|
|
|
++#ifdef __cplusplus
|
|
|
++extern "C" {
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * Check `freertos_tasks_c_additions.h` file for more info
|
|
|
++ * about these functions declaration.
|
|
|
++ */
|
|
|
++UBaseType_t pxTCBGetSize ( void );
|
|
|
++ListItem_t* pxTCBGetStateListItem ( void *pxTCB );
|
|
|
++StackType_t* pxTCBGetStartOfStack ( void *pxTCB );
|
|
|
++StackType_t* pxTCBGetTopOfStack ( void *pxTCB );
|
|
|
++StackType_t* pxTCBGetEndOfStack ( void *pxTCB );
|
|
|
++List_t* pxListGetReadyTask ( UBaseType_t idx );
|
|
|
++List_t* pxListGetReadyPendingTask ( UBaseType_t idx );
|
|
|
++List_t* pxGetDelayedTaskList ( void );
|
|
|
++List_t* pxGetOverflowDelayedTaskList ( void );
|
|
|
++List_t* pxGetTasksWaitingTermination ( void );
|
|
|
++List_t* pxGetSuspendedTaskList ( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * Used with the uxTaskGetSnapshotAll() function to save memory snapshot of each task in the system.
|
|
|
++ * We need this struct because TCB_t is defined (hidden) in tasks.c.
|
|
|
++ */
|
|
|
++typedef struct xTASK_SNAPSHOT
|
|
|
++{
|
|
|
++ void *pxTCB; /*!< Address of task control block. */
|
|
|
++ StackType_t *pxTopOfStack; /*!< Points to the location of the last item placed on the tasks stack. */
|
|
|
++ StackType_t *pxEndOfStack; /*!< Points to the end of the stack. pxTopOfStack < pxEndOfStack, stack grows hi2lo
|
|
|
++ pxTopOfStack > pxEndOfStack, stack grows lo2hi*/
|
|
|
++} TaskSnapshot_t;
|
|
|
++
|
|
|
++
|
|
|
++/*
|
|
|
++ * This function fills array with TaskSnapshot_t structures for every task in the system.
|
|
|
++ * Used by panic handling code to get snapshots of all tasks in the system.
|
|
|
++ * Only available when configENABLE_TASK_SNAPSHOT is set to 1.
|
|
|
++ * @param pxTaskSnapshotArray Pointer to array of TaskSnapshot_t structures to store tasks snapshot data.
|
|
|
++ * @param uxArraySize Size of tasks snapshots array.
|
|
|
++ * @param pxTcbSz Pointer to store size of TCB.
|
|
|
++ * @return Number of elements stored in array.
|
|
|
++ */
|
|
|
++UBaseType_t uxTaskGetSnapshotAll( TaskSnapshot_t * const pxTaskSnapshotArray, const UBaseType_t uxArraySize, UBaseType_t * const pxTcbSz );
|
|
|
++
|
|
|
++/*
|
|
|
++ * This function iterates over all tasks in the system.
|
|
|
++ * Used by panic handling code to iterate over tasks in the system.
|
|
|
++ * Only available when configENABLE_TASK_SNAPSHOT is set to 1.
|
|
|
++ * @note This function should not be used while FreeRTOS is running (as it doesn't acquire any locks).
|
|
|
++ * @param pxTask task handle.
|
|
|
++ * @return Handle for the next task. If pxTask is NULL, returns hadnle for the first task.
|
|
|
++ */
|
|
|
++TaskHandle_t pxTaskGetNext( TaskHandle_t pxTask );
|
|
|
++
|
|
|
++/*
|
|
|
++ * This function fills TaskSnapshot_t structure for specified task.
|
|
|
++ * Used by panic handling code to get snapshot of a task.
|
|
|
++ * Only available when configENABLE_TASK_SNAPSHOT is set to 1.
|
|
|
++ * @note This function should not be used while FreeRTOS is running (as it doesn't acquire any locks).
|
|
|
++ * @param pxTask task handle.
|
|
|
++ * @param pxTaskSnapshot address of TaskSnapshot_t structure to fill.
|
|
|
++ */
|
|
|
++void vTaskGetSnapshot( TaskHandle_t pxTask, TaskSnapshot_t *pxTaskSnapshot );
|
|
|
++
|
|
|
++#ifdef __cplusplus
|
|
|
++}
|
|
|
++#endif
|
|
|
++
|
|
|
++#endif
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/FreeRTOS.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/FreeRTOS.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..b3efa13f20
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/FreeRTOS.h
|
|
|
+@@ -0,0 +1,1198 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef INC_FREERTOS_H
|
|
|
++#define INC_FREERTOS_H
|
|
|
++
|
|
|
++/*
|
|
|
++ * Include the generic headers required for the FreeRTOS port being used.
|
|
|
++ */
|
|
|
++#include <stddef.h>
|
|
|
++
|
|
|
++/*
|
|
|
++ * If stdint.h cannot be located then:
|
|
|
++ * + If using GCC ensure the -nostdint options is *not* being used.
|
|
|
++ * + Ensure the project's include path includes the directory in which your
|
|
|
++ * compiler stores stdint.h.
|
|
|
++ * + Set any compiler options necessary for it to support C99, as technically
|
|
|
++ * stdint.h is only mandatory with C99 (FreeRTOS does not require C99 in any
|
|
|
++ * other way).
|
|
|
++ * + The FreeRTOS download includes a simple stdint.h definition that can be
|
|
|
++ * used in cases where none is provided by the compiler. The files only
|
|
|
++ * contains the typedefs required to build FreeRTOS. Read the instructions
|
|
|
++ * in FreeRTOS/source/stdint.readme for more information.
|
|
|
++ */
|
|
|
++#include <stdint.h> /* READ COMMENT ABOVE. */
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#include <rtthread.h>
|
|
|
++#include <rthw.h>
|
|
|
++
|
|
|
++/* Application specific configuration options. */
|
|
|
++#include "FreeRTOSConfig.h"
|
|
|
++
|
|
|
++/* Basic FreeRTOS definitions. */
|
|
|
++#include "projdefs.h"
|
|
|
++
|
|
|
++/* Definitions specific to the port being used. */
|
|
|
++#include "portable.h"
|
|
|
++
|
|
|
++/* Must be defaulted before configUSE_NEWLIB_REENTRANT is used below. */
|
|
|
++#ifndef configUSE_NEWLIB_REENTRANT
|
|
|
++ #define configUSE_NEWLIB_REENTRANT 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Required if struct _reent is used. */
|
|
|
++#if ( configUSE_NEWLIB_REENTRANT == 1 )
|
|
|
++ #include <reent.h>
|
|
|
++#endif
|
|
|
++
|
|
|
++/*
|
|
|
++ * Check all the required application specific macros have been defined.
|
|
|
++ * These macros are application specific and (as downloaded) are defined
|
|
|
++ * within FreeRTOSConfig.h.
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef configMINIMAL_STACK_SIZE
|
|
|
++ #error Missing definition: configMINIMAL_STACK_SIZE must be defined in FreeRTOSConfig.h. configMINIMAL_STACK_SIZE defines the size (in words) of the stack allocated to the idle task. Refer to the demo project provided for your port for a suitable value.
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configMAX_PRIORITIES
|
|
|
++ #error Missing definition: configMAX_PRIORITIES must be defined in FreeRTOSConfig.h. See the Configuration section of the FreeRTOS API documentation for details.
|
|
|
++#endif
|
|
|
++
|
|
|
++#if configMAX_PRIORITIES < 1
|
|
|
++ #error configMAX_PRIORITIES must be defined to be greater than or equal to 1.
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_PREEMPTION
|
|
|
++ #error Missing definition: configUSE_PREEMPTION must be defined in FreeRTOSConfig.h as either 1 or 0. See the Configuration section of the FreeRTOS API documentation for details.
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_IDLE_HOOK
|
|
|
++ #error Missing definition: configUSE_IDLE_HOOK must be defined in FreeRTOSConfig.h as either 1 or 0. See the Configuration section of the FreeRTOS API documentation for details.
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_TICK_HOOK
|
|
|
++ #error Missing definition: configUSE_TICK_HOOK must be defined in FreeRTOSConfig.h as either 1 or 0. See the Configuration section of the FreeRTOS API documentation for details.
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_16_BIT_TICKS
|
|
|
++ #error Missing definition: configUSE_16_BIT_TICKS must be defined in FreeRTOSConfig.h as either 1 or 0. See the Configuration section of the FreeRTOS API documentation for details.
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_CO_ROUTINES
|
|
|
++ #define configUSE_CO_ROUTINES 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_vTaskPrioritySet
|
|
|
++ #define INCLUDE_vTaskPrioritySet 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_uxTaskPriorityGet
|
|
|
++ #define INCLUDE_uxTaskPriorityGet 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_vTaskDelete
|
|
|
++ #define INCLUDE_vTaskDelete 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_vTaskSuspend
|
|
|
++ #define INCLUDE_vTaskSuspend 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef INCLUDE_xTaskDelayUntil
|
|
|
++ #ifdef INCLUDE_vTaskDelayUntil
|
|
|
++
|
|
|
++/* INCLUDE_vTaskDelayUntil was replaced by INCLUDE_xTaskDelayUntil. Backward
|
|
|
++ * compatibility is maintained if only one or the other is defined, but
|
|
|
++ * there is a conflict if both are defined. */
|
|
|
++ #error INCLUDE_vTaskDelayUntil and INCLUDE_xTaskDelayUntil are both defined. INCLUDE_vTaskDelayUntil is no longer required and should be removed
|
|
|
++ #endif
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskDelayUntil
|
|
|
++ #ifdef INCLUDE_vTaskDelayUntil
|
|
|
++
|
|
|
++/* If INCLUDE_vTaskDelayUntil is set but INCLUDE_xTaskDelayUntil is not then
|
|
|
++ * the project's FreeRTOSConfig.h probably pre-dates the introduction of
|
|
|
++ * xTaskDelayUntil and setting INCLUDE_xTaskDelayUntil to whatever
|
|
|
++ * INCLUDE_vTaskDelayUntil is set to will ensure backward compatibility.
|
|
|
++ */
|
|
|
++ #define INCLUDE_xTaskDelayUntil INCLUDE_vTaskDelayUntil
|
|
|
++ #endif
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskDelayUntil
|
|
|
++ #define INCLUDE_xTaskDelayUntil 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_vTaskDelay
|
|
|
++ #define INCLUDE_vTaskDelay 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskGetIdleTaskHandle
|
|
|
++ #define INCLUDE_xTaskGetIdleTaskHandle 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskAbortDelay
|
|
|
++ #define INCLUDE_xTaskAbortDelay 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xQueueGetMutexHolder
|
|
|
++ #define INCLUDE_xQueueGetMutexHolder 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xSemaphoreGetMutexHolder
|
|
|
++ #define INCLUDE_xSemaphoreGetMutexHolder INCLUDE_xQueueGetMutexHolder
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskGetHandle
|
|
|
++ #define INCLUDE_xTaskGetHandle 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_uxTaskGetStackHighWaterMark
|
|
|
++ #define INCLUDE_uxTaskGetStackHighWaterMark 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_uxTaskGetStackHighWaterMark2
|
|
|
++ #define INCLUDE_uxTaskGetStackHighWaterMark2 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_eTaskGetState
|
|
|
++ #define INCLUDE_eTaskGetState 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskResumeFromISR
|
|
|
++ #define INCLUDE_xTaskResumeFromISR 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTimerPendFunctionCall
|
|
|
++ #define INCLUDE_xTimerPendFunctionCall 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskGetSchedulerState
|
|
|
++ #define INCLUDE_xTaskGetSchedulerState 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef INCLUDE_xTaskGetCurrentTaskHandle
|
|
|
++ #define INCLUDE_xTaskGetCurrentTaskHandle 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#if configUSE_CO_ROUTINES != 0
|
|
|
++ #ifndef configMAX_CO_ROUTINE_PRIORITIES
|
|
|
++ #error configMAX_CO_ROUTINE_PRIORITIES must be greater than or equal to 1.
|
|
|
++ #endif
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_DAEMON_TASK_STARTUP_HOOK
|
|
|
++ #define configUSE_DAEMON_TASK_STARTUP_HOOK 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_APPLICATION_TASK_TAG
|
|
|
++ #define configUSE_APPLICATION_TASK_TAG 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configNUM_THREAD_LOCAL_STORAGE_POINTERS
|
|
|
++ #define configNUM_THREAD_LOCAL_STORAGE_POINTERS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_RECURSIVE_MUTEXES
|
|
|
++ #define configUSE_RECURSIVE_MUTEXES 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_MUTEXES
|
|
|
++ #define configUSE_MUTEXES 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_TIMERS
|
|
|
++ #define configUSE_TIMERS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_COUNTING_SEMAPHORES
|
|
|
++ #define configUSE_COUNTING_SEMAPHORES 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_ALTERNATIVE_API
|
|
|
++ #define configUSE_ALTERNATIVE_API 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portCRITICAL_NESTING_IN_TCB
|
|
|
++ #define portCRITICAL_NESTING_IN_TCB 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configMAX_TASK_NAME_LEN
|
|
|
++ #define configMAX_TASK_NAME_LEN 16
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configIDLE_SHOULD_YIELD
|
|
|
++ #define configIDLE_SHOULD_YIELD 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#if configMAX_TASK_NAME_LEN < 1
|
|
|
++ #error configMAX_TASK_NAME_LEN must be set to a minimum of 1 in FreeRTOSConfig.h
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configASSERT
|
|
|
++ #define configASSERT( x )
|
|
|
++ #define configASSERT_DEFINED 0
|
|
|
++#else
|
|
|
++ #define configASSERT_DEFINED 1
|
|
|
++#endif
|
|
|
++
|
|
|
++/* configPRECONDITION should be defined as configASSERT.
|
|
|
++ * The CBMC proofs need a way to track assumptions and assertions.
|
|
|
++ * A configPRECONDITION statement should express an implicit invariant or
|
|
|
++ * assumption made. A configASSERT statement should express an invariant that must
|
|
|
++ * hold explicit before calling the code. */
|
|
|
++#ifndef configPRECONDITION
|
|
|
++ #define configPRECONDITION( X ) configASSERT( X )
|
|
|
++ #define configPRECONDITION_DEFINED 0
|
|
|
++#else
|
|
|
++ #define configPRECONDITION_DEFINED 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portMEMORY_BARRIER
|
|
|
++ #define portMEMORY_BARRIER()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portSOFTWARE_BARRIER
|
|
|
++ #define portSOFTWARE_BARRIER()
|
|
|
++#endif
|
|
|
++
|
|
|
++/* The timers module relies on xTaskGetSchedulerState(). */
|
|
|
++#if configUSE_TIMERS == 1
|
|
|
++
|
|
|
++ #ifndef configTIMER_TASK_PRIORITY
|
|
|
++ #error If configUSE_TIMERS is set to 1 then configTIMER_TASK_PRIORITY must also be defined.
|
|
|
++ #endif /* configTIMER_TASK_PRIORITY */
|
|
|
++
|
|
|
++ #ifndef configTIMER_QUEUE_LENGTH
|
|
|
++ #error If configUSE_TIMERS is set to 1 then configTIMER_QUEUE_LENGTH must also be defined.
|
|
|
++ #endif /* configTIMER_QUEUE_LENGTH */
|
|
|
++
|
|
|
++ #ifndef configTIMER_TASK_STACK_DEPTH
|
|
|
++ #error If configUSE_TIMERS is set to 1 then configTIMER_TASK_STACK_DEPTH must also be defined.
|
|
|
++ #endif /* configTIMER_TASK_STACK_DEPTH */
|
|
|
++
|
|
|
++#endif /* configUSE_TIMERS */
|
|
|
++
|
|
|
++#ifndef portSET_INTERRUPT_MASK_FROM_ISR
|
|
|
++ #define portSET_INTERRUPT_MASK_FROM_ISR() 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portCLEAR_INTERRUPT_MASK_FROM_ISR
|
|
|
++ #define portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedStatusValue ) ( void ) uxSavedStatusValue
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portCLEAN_UP_TCB
|
|
|
++ #define portCLEAN_UP_TCB( pxTCB ) ( void ) pxTCB
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portPRE_TASK_DELETE_HOOK
|
|
|
++ #define portPRE_TASK_DELETE_HOOK( pvTaskToDelete, pxYieldPending )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portSETUP_TCB
|
|
|
++ #define portSETUP_TCB( pxTCB ) ( void ) pxTCB
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configQUEUE_REGISTRY_SIZE
|
|
|
++ #define configQUEUE_REGISTRY_SIZE 0U
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( configQUEUE_REGISTRY_SIZE < 1 )
|
|
|
++ #define vQueueAddToRegistry( xQueue, pcName )
|
|
|
++ #define vQueueUnregisterQueue( xQueue )
|
|
|
++ #define pcQueueGetName( xQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portPOINTER_SIZE_TYPE
|
|
|
++ #define portPOINTER_SIZE_TYPE uint32_t
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Remove any unused trace macros. */
|
|
|
++#ifndef traceSTART
|
|
|
++
|
|
|
++/* Used to perform any necessary initialisation - for example, open a file
|
|
|
++ * into which trace is to be written. */
|
|
|
++ #define traceSTART()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEND
|
|
|
++
|
|
|
++/* Use to close a trace, for example close a file into which trace has been
|
|
|
++ * written. */
|
|
|
++ #define traceEND()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_SWITCHED_IN
|
|
|
++
|
|
|
++/* Called after a task has been selected to run. pxCurrentTCB holds a pointer
|
|
|
++ * to the task control block of the selected task. */
|
|
|
++ #define traceTASK_SWITCHED_IN()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceINCREASE_TICK_COUNT
|
|
|
++
|
|
|
++/* Called before stepping the tick count after waking from tickless idle
|
|
|
++ * sleep. */
|
|
|
++ #define traceINCREASE_TICK_COUNT( x )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceLOW_POWER_IDLE_BEGIN
|
|
|
++ /* Called immediately before entering tickless idle. */
|
|
|
++ #define traceLOW_POWER_IDLE_BEGIN()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceLOW_POWER_IDLE_END
|
|
|
++ /* Called when returning to the Idle task after a tickless idle. */
|
|
|
++ #define traceLOW_POWER_IDLE_END()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_SWITCHED_OUT
|
|
|
++
|
|
|
++/* Called before a task has been selected to run. pxCurrentTCB holds a pointer
|
|
|
++ * to the task control block of the task being switched out. */
|
|
|
++ #define traceTASK_SWITCHED_OUT()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_PRIORITY_INHERIT
|
|
|
++
|
|
|
++/* Called when a task attempts to take a mutex that is already held by a
|
|
|
++ * lower priority task. pxTCBOfMutexHolder is a pointer to the TCB of the task
|
|
|
++ * that holds the mutex. uxInheritedPriority is the priority the mutex holder
|
|
|
++ * will inherit (the priority of the task that is attempting to obtain the
|
|
|
++ * muted. */
|
|
|
++ #define traceTASK_PRIORITY_INHERIT( pxTCBOfMutexHolder, uxInheritedPriority )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_PRIORITY_DISINHERIT
|
|
|
++
|
|
|
++/* Called when a task releases a mutex, the holding of which had resulted in
|
|
|
++ * the task inheriting the priority of a higher priority task.
|
|
|
++ * pxTCBOfMutexHolder is a pointer to the TCB of the task that is releasing the
|
|
|
++ * mutex. uxOriginalPriority is the task's configured (base) priority. */
|
|
|
++ #define traceTASK_PRIORITY_DISINHERIT( pxTCBOfMutexHolder, uxOriginalPriority )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceBLOCKING_ON_QUEUE_RECEIVE
|
|
|
++
|
|
|
++/* Task is about to block because it cannot read from a
|
|
|
++ * queue/mutex/semaphore. pxQueue is a pointer to the queue/mutex/semaphore
|
|
|
++ * upon which the read was attempted. pxCurrentTCB points to the TCB of the
|
|
|
++ * task that attempted the read. */
|
|
|
++ #define traceBLOCKING_ON_QUEUE_RECEIVE( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceBLOCKING_ON_QUEUE_PEEK
|
|
|
++
|
|
|
++/* Task is about to block because it cannot read from a
|
|
|
++ * queue/mutex/semaphore. pxQueue is a pointer to the queue/mutex/semaphore
|
|
|
++ * upon which the read was attempted. pxCurrentTCB points to the TCB of the
|
|
|
++ * task that attempted the read. */
|
|
|
++ #define traceBLOCKING_ON_QUEUE_PEEK( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceBLOCKING_ON_QUEUE_SEND
|
|
|
++
|
|
|
++/* Task is about to block because it cannot write to a
|
|
|
++ * queue/mutex/semaphore. pxQueue is a pointer to the queue/mutex/semaphore
|
|
|
++ * upon which the write was attempted. pxCurrentTCB points to the TCB of the
|
|
|
++ * task that attempted the write. */
|
|
|
++ #define traceBLOCKING_ON_QUEUE_SEND( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configCHECK_FOR_STACK_OVERFLOW
|
|
|
++ #define configCHECK_FOR_STACK_OVERFLOW 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configRECORD_STACK_HIGH_ADDRESS
|
|
|
++ #define configRECORD_STACK_HIGH_ADDRESS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configINCLUDE_FREERTOS_TASK_C_ADDITIONS_H
|
|
|
++ #define configINCLUDE_FREERTOS_TASK_C_ADDITIONS_H 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* The following event macros are embedded in the kernel API calls. */
|
|
|
++
|
|
|
++#ifndef traceMOVED_TASK_TO_READY_STATE
|
|
|
++ #define traceMOVED_TASK_TO_READY_STATE( pxTCB )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef tracePOST_MOVED_TASK_TO_READY_STATE
|
|
|
++ #define tracePOST_MOVED_TASK_TO_READY_STATE( pxTCB )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_CREATE
|
|
|
++ #define traceQUEUE_CREATE( pxNewQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_CREATE_FAILED
|
|
|
++ #define traceQUEUE_CREATE_FAILED( ucQueueType )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceCREATE_MUTEX
|
|
|
++ #define traceCREATE_MUTEX( pxNewQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceCREATE_MUTEX_FAILED
|
|
|
++ #define traceCREATE_MUTEX_FAILED()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceGIVE_MUTEX_RECURSIVE
|
|
|
++ #define traceGIVE_MUTEX_RECURSIVE( pxMutex )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceGIVE_MUTEX_RECURSIVE_FAILED
|
|
|
++ #define traceGIVE_MUTEX_RECURSIVE_FAILED( pxMutex )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTAKE_MUTEX_RECURSIVE
|
|
|
++ #define traceTAKE_MUTEX_RECURSIVE( pxMutex )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTAKE_MUTEX_RECURSIVE_FAILED
|
|
|
++ #define traceTAKE_MUTEX_RECURSIVE_FAILED( pxMutex )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceCREATE_COUNTING_SEMAPHORE
|
|
|
++ #define traceCREATE_COUNTING_SEMAPHORE()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceCREATE_COUNTING_SEMAPHORE_FAILED
|
|
|
++ #define traceCREATE_COUNTING_SEMAPHORE_FAILED()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_SET_SEND
|
|
|
++ #define traceQUEUE_SET_SEND traceQUEUE_SEND
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_SEND
|
|
|
++ #define traceQUEUE_SEND( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_SEND_FAILED
|
|
|
++ #define traceQUEUE_SEND_FAILED( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_RECEIVE
|
|
|
++ #define traceQUEUE_RECEIVE( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_PEEK
|
|
|
++ #define traceQUEUE_PEEK( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_PEEK_FAILED
|
|
|
++ #define traceQUEUE_PEEK_FAILED( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_PEEK_FROM_ISR
|
|
|
++ #define traceQUEUE_PEEK_FROM_ISR( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_RECEIVE_FAILED
|
|
|
++ #define traceQUEUE_RECEIVE_FAILED( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_SEND_FROM_ISR
|
|
|
++ #define traceQUEUE_SEND_FROM_ISR( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_SEND_FROM_ISR_FAILED
|
|
|
++ #define traceQUEUE_SEND_FROM_ISR_FAILED( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_RECEIVE_FROM_ISR
|
|
|
++ #define traceQUEUE_RECEIVE_FROM_ISR( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_RECEIVE_FROM_ISR_FAILED
|
|
|
++ #define traceQUEUE_RECEIVE_FROM_ISR_FAILED( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_PEEK_FROM_ISR_FAILED
|
|
|
++ #define traceQUEUE_PEEK_FROM_ISR_FAILED( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_DELETE
|
|
|
++ #define traceQUEUE_DELETE( pxQueue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_CREATE
|
|
|
++ #define traceTASK_CREATE( pxNewTCB )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_CREATE_FAILED
|
|
|
++ #define traceTASK_CREATE_FAILED()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_DELETE
|
|
|
++ #define traceTASK_DELETE( pxTaskToDelete )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_DELAY_UNTIL
|
|
|
++ #define traceTASK_DELAY_UNTIL( x )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_DELAY
|
|
|
++ #define traceTASK_DELAY()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_PRIORITY_SET
|
|
|
++ #define traceTASK_PRIORITY_SET( pxTask, uxNewPriority )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_SUSPEND
|
|
|
++ #define traceTASK_SUSPEND( pxTaskToSuspend )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_RESUME
|
|
|
++ #define traceTASK_RESUME( pxTaskToResume )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_RESUME_FROM_ISR
|
|
|
++ #define traceTASK_RESUME_FROM_ISR( pxTaskToResume )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_INCREMENT_TICK
|
|
|
++ #define traceTASK_INCREMENT_TICK( xTickCount )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTIMER_CREATE
|
|
|
++ #define traceTIMER_CREATE( pxNewTimer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTIMER_CREATE_FAILED
|
|
|
++ #define traceTIMER_CREATE_FAILED()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTIMER_COMMAND_SEND
|
|
|
++ #define traceTIMER_COMMAND_SEND( xTimer, xMessageID, xMessageValueValue, xReturn )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTIMER_EXPIRED
|
|
|
++ #define traceTIMER_EXPIRED( pxTimer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTIMER_COMMAND_RECEIVED
|
|
|
++ #define traceTIMER_COMMAND_RECEIVED( pxTimer, xMessageID, xMessageValue )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceMALLOC
|
|
|
++ #define traceMALLOC( pvAddress, uiSize )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceFREE
|
|
|
++ #define traceFREE( pvAddress, uiSize )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_CREATE
|
|
|
++ #define traceEVENT_GROUP_CREATE( xEventGroup )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_CREATE_FAILED
|
|
|
++ #define traceEVENT_GROUP_CREATE_FAILED()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_SYNC_BLOCK
|
|
|
++ #define traceEVENT_GROUP_SYNC_BLOCK( xEventGroup, uxBitsToSet, uxBitsToWaitFor )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_SYNC_END
|
|
|
++ #define traceEVENT_GROUP_SYNC_END( xEventGroup, uxBitsToSet, uxBitsToWaitFor, xTimeoutOccurred ) ( void ) xTimeoutOccurred
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_WAIT_BITS_BLOCK
|
|
|
++ #define traceEVENT_GROUP_WAIT_BITS_BLOCK( xEventGroup, uxBitsToWaitFor )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_WAIT_BITS_END
|
|
|
++ #define traceEVENT_GROUP_WAIT_BITS_END( xEventGroup, uxBitsToWaitFor, xTimeoutOccurred ) ( void ) xTimeoutOccurred
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_CLEAR_BITS
|
|
|
++ #define traceEVENT_GROUP_CLEAR_BITS( xEventGroup, uxBitsToClear )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_CLEAR_BITS_FROM_ISR
|
|
|
++ #define traceEVENT_GROUP_CLEAR_BITS_FROM_ISR( xEventGroup, uxBitsToClear )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_SET_BITS
|
|
|
++ #define traceEVENT_GROUP_SET_BITS( xEventGroup, uxBitsToSet )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_SET_BITS_FROM_ISR
|
|
|
++ #define traceEVENT_GROUP_SET_BITS_FROM_ISR( xEventGroup, uxBitsToSet )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceEVENT_GROUP_DELETE
|
|
|
++ #define traceEVENT_GROUP_DELETE( xEventGroup )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef tracePEND_FUNC_CALL
|
|
|
++ #define tracePEND_FUNC_CALL( xFunctionToPend, pvParameter1, ulParameter2, ret )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef tracePEND_FUNC_CALL_FROM_ISR
|
|
|
++ #define tracePEND_FUNC_CALL_FROM_ISR( xFunctionToPend, pvParameter1, ulParameter2, ret )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceQUEUE_REGISTRY_ADD
|
|
|
++ #define traceQUEUE_REGISTRY_ADD( xQueue, pcQueueName )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY_TAKE_BLOCK
|
|
|
++ #define traceTASK_NOTIFY_TAKE_BLOCK( uxIndexToWait )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY_TAKE
|
|
|
++ #define traceTASK_NOTIFY_TAKE( uxIndexToWait )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY_WAIT_BLOCK
|
|
|
++ #define traceTASK_NOTIFY_WAIT_BLOCK( uxIndexToWait )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY_WAIT
|
|
|
++ #define traceTASK_NOTIFY_WAIT( uxIndexToWait )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY
|
|
|
++ #define traceTASK_NOTIFY( uxIndexToNotify )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY_FROM_ISR
|
|
|
++ #define traceTASK_NOTIFY_FROM_ISR( uxIndexToNotify )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceTASK_NOTIFY_GIVE_FROM_ISR
|
|
|
++ #define traceTASK_NOTIFY_GIVE_FROM_ISR( uxIndexToNotify )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_CREATE_FAILED
|
|
|
++ #define traceSTREAM_BUFFER_CREATE_FAILED( xIsMessageBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_CREATE_STATIC_FAILED
|
|
|
++ #define traceSTREAM_BUFFER_CREATE_STATIC_FAILED( xReturn, xIsMessageBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_CREATE
|
|
|
++ #define traceSTREAM_BUFFER_CREATE( pxStreamBuffer, xIsMessageBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_DELETE
|
|
|
++ #define traceSTREAM_BUFFER_DELETE( xStreamBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_RESET
|
|
|
++ #define traceSTREAM_BUFFER_RESET( xStreamBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceBLOCKING_ON_STREAM_BUFFER_SEND
|
|
|
++ #define traceBLOCKING_ON_STREAM_BUFFER_SEND( xStreamBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_SEND
|
|
|
++ #define traceSTREAM_BUFFER_SEND( xStreamBuffer, xBytesSent )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_SEND_FAILED
|
|
|
++ #define traceSTREAM_BUFFER_SEND_FAILED( xStreamBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_SEND_FROM_ISR
|
|
|
++ #define traceSTREAM_BUFFER_SEND_FROM_ISR( xStreamBuffer, xBytesSent )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceBLOCKING_ON_STREAM_BUFFER_RECEIVE
|
|
|
++ #define traceBLOCKING_ON_STREAM_BUFFER_RECEIVE( xStreamBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_RECEIVE
|
|
|
++ #define traceSTREAM_BUFFER_RECEIVE( xStreamBuffer, xReceivedLength )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_RECEIVE_FAILED
|
|
|
++ #define traceSTREAM_BUFFER_RECEIVE_FAILED( xStreamBuffer )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceSTREAM_BUFFER_RECEIVE_FROM_ISR
|
|
|
++ #define traceSTREAM_BUFFER_RECEIVE_FROM_ISR( xStreamBuffer, xReceivedLength )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef ESP_PLATFORM
|
|
|
++#ifndef traceISR_EXIT_TO_SCHEDULER
|
|
|
++ #define traceISR_EXIT_TO_SCHEDULER()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceISR_EXIT
|
|
|
++ #define traceISR_EXIT()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef traceISR_ENTER
|
|
|
++ #define traceISR_ENTER(_n_)
|
|
|
++#endif
|
|
|
++#endif // ESP_PLATFORM
|
|
|
++
|
|
|
++#ifndef configGENERATE_RUN_TIME_STATS
|
|
|
++ #define configGENERATE_RUN_TIME_STATS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( configGENERATE_RUN_TIME_STATS == 1 )
|
|
|
++
|
|
|
++ #ifndef portCONFIGURE_TIMER_FOR_RUN_TIME_STATS
|
|
|
++ #error If configGENERATE_RUN_TIME_STATS is defined then portCONFIGURE_TIMER_FOR_RUN_TIME_STATS must also be defined. portCONFIGURE_TIMER_FOR_RUN_TIME_STATS should call a port layer function to setup a peripheral timer/counter that can then be used as the run time counter time base.
|
|
|
++ #endif /* portCONFIGURE_TIMER_FOR_RUN_TIME_STATS */
|
|
|
++
|
|
|
++ #ifndef portGET_RUN_TIME_COUNTER_VALUE
|
|
|
++ #ifndef portALT_GET_RUN_TIME_COUNTER_VALUE
|
|
|
++ #error If configGENERATE_RUN_TIME_STATS is defined then either portGET_RUN_TIME_COUNTER_VALUE or portALT_GET_RUN_TIME_COUNTER_VALUE must also be defined. See the examples provided and the FreeRTOS web site for more information.
|
|
|
++ #endif /* portALT_GET_RUN_TIME_COUNTER_VALUE */
|
|
|
++ #endif /* portGET_RUN_TIME_COUNTER_VALUE */
|
|
|
++
|
|
|
++#endif /* configGENERATE_RUN_TIME_STATS */
|
|
|
++
|
|
|
++#ifndef portCONFIGURE_TIMER_FOR_RUN_TIME_STATS
|
|
|
++ #define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_MALLOC_FAILED_HOOK
|
|
|
++ #define configUSE_MALLOC_FAILED_HOOK 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portPRIVILEGE_BIT
|
|
|
++ #define portPRIVILEGE_BIT ( ( UBaseType_t ) 0x00 )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portYIELD_WITHIN_API
|
|
|
++ #define portYIELD_WITHIN_API portYIELD
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portSUPPRESS_TICKS_AND_SLEEP
|
|
|
++ #define portSUPPRESS_TICKS_AND_SLEEP( xExpectedIdleTime )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configEXPECTED_IDLE_TIME_BEFORE_SLEEP
|
|
|
++ #define configEXPECTED_IDLE_TIME_BEFORE_SLEEP 2
|
|
|
++#endif
|
|
|
++
|
|
|
++#if configEXPECTED_IDLE_TIME_BEFORE_SLEEP < 2
|
|
|
++ #error configEXPECTED_IDLE_TIME_BEFORE_SLEEP must not be less than 2
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_TICKLESS_IDLE
|
|
|
++ #define configUSE_TICKLESS_IDLE 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configPRE_SUPPRESS_TICKS_AND_SLEEP_PROCESSING
|
|
|
++ #define configPRE_SUPPRESS_TICKS_AND_SLEEP_PROCESSING( x )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configPRE_SLEEP_PROCESSING
|
|
|
++ #define configPRE_SLEEP_PROCESSING( x )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configPOST_SLEEP_PROCESSING
|
|
|
++ #define configPOST_SLEEP_PROCESSING( x )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_QUEUE_SETS
|
|
|
++ #define configUSE_QUEUE_SETS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portTASK_USES_FLOATING_POINT
|
|
|
++ #define portTASK_USES_FLOATING_POINT()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portALLOCATE_SECURE_CONTEXT
|
|
|
++ #define portALLOCATE_SECURE_CONTEXT( ulSecureStackSize )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portDONT_DISCARD
|
|
|
++ #define portDONT_DISCARD
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_TIME_SLICING
|
|
|
++ #define configUSE_TIME_SLICING 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS
|
|
|
++ #define configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_STATS_FORMATTING_FUNCTIONS
|
|
|
++ #define configUSE_STATS_FORMATTING_FUNCTIONS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portASSERT_IF_INTERRUPT_PRIORITY_INVALID
|
|
|
++ #define portASSERT_IF_INTERRUPT_PRIORITY_INVALID()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_TRACE_FACILITY
|
|
|
++ #define configUSE_TRACE_FACILITY 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef mtCOVERAGE_TEST_MARKER
|
|
|
++ #define mtCOVERAGE_TEST_MARKER()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef mtCOVERAGE_TEST_DELAY
|
|
|
++ #define mtCOVERAGE_TEST_DELAY()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portASSERT_IF_IN_ISR
|
|
|
++ #define portASSERT_IF_IN_ISR()
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_PORT_OPTIMISED_TASK_SELECTION
|
|
|
++ #define configUSE_PORT_OPTIMISED_TASK_SELECTION 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configAPPLICATION_ALLOCATED_HEAP
|
|
|
++ #define configAPPLICATION_ALLOCATED_HEAP 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_TASK_NOTIFICATIONS
|
|
|
++ #define configUSE_TASK_NOTIFICATIONS 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configTASK_NOTIFICATION_ARRAY_ENTRIES
|
|
|
++ #define configTASK_NOTIFICATION_ARRAY_ENTRIES 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#if configTASK_NOTIFICATION_ARRAY_ENTRIES < 1
|
|
|
++ #error configTASK_NOTIFICATION_ARRAY_ENTRIES must be at least 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configUSE_POSIX_ERRNO
|
|
|
++ #define configUSE_POSIX_ERRNO 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef portTICK_TYPE_IS_ATOMIC
|
|
|
++ #define portTICK_TYPE_IS_ATOMIC 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configSUPPORT_STATIC_ALLOCATION
|
|
|
++ /* Defaults to 0 for backward compatibility. */
|
|
|
++ #define configSUPPORT_STATIC_ALLOCATION 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configSUPPORT_DYNAMIC_ALLOCATION
|
|
|
++ /* Defaults to 1 for backward compatibility. */
|
|
|
++ #define configSUPPORT_DYNAMIC_ALLOCATION 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configSTACK_DEPTH_TYPE
|
|
|
++
|
|
|
++/* Defaults to uint16_t for backward compatibility, but can be overridden
|
|
|
++ * in FreeRTOSConfig.h if uint16_t is too restrictive. */
|
|
|
++ #define configSTACK_DEPTH_TYPE uint16_t
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configRUN_TIME_COUNTER_TYPE
|
|
|
++
|
|
|
++/* Defaults to uint32_t for backward compatibility, but can be overridden in
|
|
|
++ * FreeRTOSConfig.h if uint32_t is too restrictive. */
|
|
|
++
|
|
|
++ #define configRUN_TIME_COUNTER_TYPE uint32_t
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configMESSAGE_BUFFER_LENGTH_TYPE
|
|
|
++
|
|
|
++/* Defaults to size_t for backward compatibility, but can be overridden
|
|
|
++ * in FreeRTOSConfig.h if lengths will always be less than the number of bytes
|
|
|
++ * in a size_t. */
|
|
|
++ #define configMESSAGE_BUFFER_LENGTH_TYPE size_t
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Sanity check the configuration. */
|
|
|
++#if ( configUSE_TICKLESS_IDLE != 0 )
|
|
|
++ #if ( INCLUDE_vTaskSuspend != 1 )
|
|
|
++ #error INCLUDE_vTaskSuspend must be set to 1 if configUSE_TICKLESS_IDLE is not set to 0
|
|
|
++ #endif /* INCLUDE_vTaskSuspend */
|
|
|
++#endif /* configUSE_TICKLESS_IDLE */
|
|
|
++
|
|
|
++#if ( ( configSUPPORT_STATIC_ALLOCATION == 0 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 0 ) )
|
|
|
++ #error configSUPPORT_STATIC_ALLOCATION and configSUPPORT_DYNAMIC_ALLOCATION cannot both be 0, but can both be 1.
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( ( configUSE_RECURSIVE_MUTEXES == 1 ) && ( configUSE_MUTEXES != 1 ) )
|
|
|
++ #error configUSE_MUTEXES must be set to 1 to use recursive mutexes
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configINITIAL_TICK_COUNT
|
|
|
++ #define configINITIAL_TICK_COUNT 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( portTICK_TYPE_IS_ATOMIC == 0 )
|
|
|
++
|
|
|
++/* Either variables of tick type cannot be read atomically, or
|
|
|
++ * portTICK_TYPE_IS_ATOMIC was not set - map the critical sections used when
|
|
|
++ * the tick count is returned to the standard critical section macros. */
|
|
|
++ #define portTICK_TYPE_ENTER_CRITICAL() portENTER_CRITICAL()
|
|
|
++ #define portTICK_TYPE_EXIT_CRITICAL() portEXIT_CRITICAL()
|
|
|
++ #define portTICK_TYPE_SET_INTERRUPT_MASK_FROM_ISR() portSET_INTERRUPT_MASK_FROM_ISR()
|
|
|
++ #define portTICK_TYPE_CLEAR_INTERRUPT_MASK_FROM_ISR( x ) portCLEAR_INTERRUPT_MASK_FROM_ISR( ( x ) )
|
|
|
++#else
|
|
|
++
|
|
|
++/* The tick type can be read atomically, so critical sections used when the
|
|
|
++ * tick count is returned can be defined away. */
|
|
|
++ #define portTICK_TYPE_ENTER_CRITICAL()
|
|
|
++ #define portTICK_TYPE_EXIT_CRITICAL()
|
|
|
++ #define portTICK_TYPE_SET_INTERRUPT_MASK_FROM_ISR() 0
|
|
|
++ #define portTICK_TYPE_CLEAR_INTERRUPT_MASK_FROM_ISR( x ) ( void ) x
|
|
|
++#endif /* if ( portTICK_TYPE_IS_ATOMIC == 0 ) */
|
|
|
++
|
|
|
++/* Definitions to allow backward compatibility with FreeRTOS versions prior to
|
|
|
++ * V8 if desired. */
|
|
|
++#ifndef configENABLE_BACKWARD_COMPATIBILITY
|
|
|
++ #define configENABLE_BACKWARD_COMPATIBILITY 1
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configPRINTF
|
|
|
++
|
|
|
++/* configPRINTF() was not defined, so define it away to nothing. To use
|
|
|
++ * configPRINTF() then define it as follows (where MyPrintFunction() is
|
|
|
++ * provided by the application writer):
|
|
|
++ *
|
|
|
++ * void MyPrintFunction(const char *pcFormat, ... );
|
|
|
++ #define configPRINTF( X ) MyPrintFunction X
|
|
|
++ *
|
|
|
++ * Then call like a standard printf() function, but placing brackets around
|
|
|
++ * all parameters so they are passed as a single parameter. For example:
|
|
|
++ * configPRINTF( ("Value = %d", MyVariable) ); */
|
|
|
++ #define configPRINTF( X )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configMAX
|
|
|
++
|
|
|
++/* The application writer has not provided their own MAX macro, so define
|
|
|
++ * the following generic implementation. */
|
|
|
++ #define configMAX( a, b ) ( ( ( a ) > ( b ) ) ? ( a ) : ( b ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configMIN
|
|
|
++
|
|
|
++/* The application writer has not provided their own MIN macro, so define
|
|
|
++ * the following generic implementation. */
|
|
|
++ #define configMIN( a, b ) ( ( ( a ) < ( b ) ) ? ( a ) : ( b ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++#if configENABLE_BACKWARD_COMPATIBILITY == 1
|
|
|
++ #define eTaskStateGet eTaskGetState
|
|
|
++ #define portTickType TickType_t
|
|
|
++ #define xTaskHandle TaskHandle_t
|
|
|
++ #define xQueueHandle QueueHandle_t
|
|
|
++ #define xSemaphoreHandle SemaphoreHandle_t
|
|
|
++ #define xQueueSetHandle QueueSetHandle_t
|
|
|
++ #define xQueueSetMemberHandle QueueSetMemberHandle_t
|
|
|
++ #define xTimeOutType TimeOut_t
|
|
|
++ #define xMemoryRegion MemoryRegion_t
|
|
|
++ #define xTaskParameters TaskParameters_t
|
|
|
++ #define xTaskStatusType TaskStatus_t
|
|
|
++ #define xTimerHandle TimerHandle_t
|
|
|
++ #define xCoRoutineHandle CoRoutineHandle_t
|
|
|
++ #define pdTASK_HOOK_CODE TaskHookFunction_t
|
|
|
++ #define portTICK_RATE_MS portTICK_PERIOD_MS
|
|
|
++ #define pcTaskGetTaskName pcTaskGetName
|
|
|
++ #define pcTimerGetTimerName pcTimerGetName
|
|
|
++ #define pcQueueGetQueueName pcQueueGetName
|
|
|
++ #define vTaskGetTaskInfo vTaskGetInfo
|
|
|
++ #define xTaskGetIdleRunTimeCounter ulTaskGetIdleRunTimeCounter
|
|
|
++
|
|
|
++/* Backward compatibility within the scheduler code only - these definitions
|
|
|
++ * are not really required but are included for completeness. */
|
|
|
++ #define tmrTIMER_CALLBACK TimerCallbackFunction_t
|
|
|
++ #define pdTASK_CODE TaskFunction_t
|
|
|
++ #define xListItem ListItem_t
|
|
|
++ #define xList List_t
|
|
|
++
|
|
|
++/* For libraries that break the list data hiding, and access list structure
|
|
|
++ * members directly (which is not supposed to be done). */
|
|
|
++ #define pxContainer pvContainer
|
|
|
++#endif /* configENABLE_BACKWARD_COMPATIBILITY */
|
|
|
++
|
|
|
++#if ( configUSE_ALTERNATIVE_API != 0 )
|
|
|
++ #error The alternative API was deprecated some time ago, and was removed in FreeRTOS V9.0 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Set configUSE_TASK_FPU_SUPPORT to 0 to omit floating point support even
|
|
|
++ * if floating point hardware is otherwise supported by the FreeRTOS port in use.
|
|
|
++ * This constant is not supported by all FreeRTOS ports that include floating
|
|
|
++ * point support. */
|
|
|
++#ifndef configUSE_TASK_FPU_SUPPORT
|
|
|
++ #define configUSE_TASK_FPU_SUPPORT 1
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Set configENABLE_MPU to 1 to enable MPU support and 0 to disable it. This is
|
|
|
++ * currently used in ARMv8M ports. */
|
|
|
++#ifndef configENABLE_MPU
|
|
|
++ #define configENABLE_MPU 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Set configENABLE_FPU to 1 to enable FPU support and 0 to disable it. This is
|
|
|
++ * currently used in ARMv8M ports. */
|
|
|
++#ifndef configENABLE_FPU
|
|
|
++ #define configENABLE_FPU 1
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Set configENABLE_TRUSTZONE to 1 enable TrustZone support and 0 to disable it.
|
|
|
++ * This is currently used in ARMv8M ports. */
|
|
|
++#ifndef configENABLE_TRUSTZONE
|
|
|
++ #define configENABLE_TRUSTZONE 1
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Set configRUN_FREERTOS_SECURE_ONLY to 1 to run the FreeRTOS ARMv8M port on
|
|
|
++ * the Secure Side only. */
|
|
|
++#ifndef configRUN_FREERTOS_SECURE_ONLY
|
|
|
++ #define configRUN_FREERTOS_SECURE_ONLY 0
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef configRUN_ADDITIONAL_TESTS
|
|
|
++ #define configRUN_ADDITIONAL_TESTS 0
|
|
|
++#endif
|
|
|
++
|
|
|
++
|
|
|
++/* Sometimes the FreeRTOSConfig.h settings only allow a task to be created using
|
|
|
++ * dynamically allocated RAM, in which case when any task is deleted it is known
|
|
|
++ * that both the task's stack and TCB need to be freed. Sometimes the
|
|
|
++ * FreeRTOSConfig.h settings only allow a task to be created using statically
|
|
|
++ * allocated RAM, in which case when any task is deleted it is known that neither
|
|
|
++ * the task's stack or TCB should be freed. Sometimes the FreeRTOSConfig.h
|
|
|
++ * settings allow a task to be created using either statically or dynamically
|
|
|
++ * allocated RAM, in which case a member of the TCB is used to record whether the
|
|
|
++ * stack and/or TCB were allocated statically or dynamically, so when a task is
|
|
|
++ * deleted the RAM that was allocated dynamically is freed again and no attempt is
|
|
|
++ * made to free the RAM that was allocated statically.
|
|
|
++ * tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE is only true if it is possible for a
|
|
|
++ * task to be created using either statically or dynamically allocated RAM. Note
|
|
|
++ * that if portUSING_MPU_WRAPPERS is 1 then a protected task can be created with
|
|
|
++ * a statically allocated stack and a dynamically allocated TCB.
|
|
|
++ *
|
|
|
++ * The following table lists various combinations of portUSING_MPU_WRAPPERS,
|
|
|
++ * configSUPPORT_DYNAMIC_ALLOCATION and configSUPPORT_STATIC_ALLOCATION and
|
|
|
++ * when it is possible to have both static and dynamic allocation:
|
|
|
++ * +-----+---------+--------+-----------------------------+-----------------------------------+------------------+-----------+
|
|
|
++ * | MPU | Dynamic | Static | Available Functions | Possible Allocations | Both Dynamic and | Need Free |
|
|
|
++ * | | | | | | Static Possible | |
|
|
|
++ * +-----+---------+--------+-----------------------------+-----------------------------------+------------------+-----------+
|
|
|
++ * | 0 | 0 | 1 | xTaskCreateStatic | TCB - Static, Stack - Static | No | No |
|
|
|
++ * +-----|---------|--------|-----------------------------|-----------------------------------|------------------|-----------|
|
|
|
++ * | 0 | 1 | 0 | xTaskCreate | TCB - Dynamic, Stack - Dynamic | No | Yes |
|
|
|
++ * +-----|---------|--------|-----------------------------|-----------------------------------|------------------|-----------|
|
|
|
++ * | 0 | 1 | 1 | xTaskCreate, | 1. TCB - Dynamic, Stack - Dynamic | Yes | Yes |
|
|
|
++ * | | | | xTaskCreateStatic | 2. TCB - Static, Stack - Static | | |
|
|
|
++ * +-----|---------|--------|-----------------------------|-----------------------------------|------------------|-----------|
|
|
|
++ * | 1 | 0 | 1 | xTaskCreateStatic, | TCB - Static, Stack - Static | No | No |
|
|
|
++ * | | | | xTaskCreateRestrictedStatic | | | |
|
|
|
++ * +-----|---------|--------|-----------------------------|-----------------------------------|------------------|-----------|
|
|
|
++ * | 1 | 1 | 0 | xTaskCreate, | 1. TCB - Dynamic, Stack - Dynamic | Yes | Yes |
|
|
|
++ * | | | | xTaskCreateRestricted | 2. TCB - Dynamic, Stack - Static | | |
|
|
|
++ * +-----|---------|--------|-----------------------------|-----------------------------------|------------------|-----------|
|
|
|
++ * | 1 | 1 | 1 | xTaskCreate, | 1. TCB - Dynamic, Stack - Dynamic | Yes | Yes |
|
|
|
++ * | | | | xTaskCreateStatic, | 2. TCB - Dynamic, Stack - Static | | |
|
|
|
++ * | | | | xTaskCreateRestricted, | 3. TCB - Static, Stack - Static | | |
|
|
|
++ * | | | | xTaskCreateRestrictedStatic | | | |
|
|
|
++ * +-----+---------+--------+-----------------------------+-----------------------------------+------------------+-----------+
|
|
|
++ */
|
|
|
++#define tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE \
|
|
|
++ ( ( ( portUSING_MPU_WRAPPERS == 0 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) ) || \
|
|
|
++ ( ( portUSING_MPU_WRAPPERS == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) ) )
|
|
|
++
|
|
|
++/*
|
|
|
++ * In line with software engineering best practice, especially when supplying a
|
|
|
++ * library that is likely to change in future versions, FreeRTOS implements a
|
|
|
++ * strict data hiding policy. This means the Task structure used internally by
|
|
|
++ * FreeRTOS is not accessible to application code. However, if the application
|
|
|
++ * writer wants to statically allocate the memory required to create a task then
|
|
|
++ * the size of the task object needs to be known. The StaticTask_t structure
|
|
|
++ * below is provided for this purpose. Its sizes and alignment requirements are
|
|
|
++ * guaranteed to match those of the genuine structure, no matter which
|
|
|
++ * architecture is being used, and no matter how the values in FreeRTOSConfig.h
|
|
|
++ * are set. Its contents are somewhat obfuscated in the hope users will
|
|
|
++ * recognise that it would be unwise to make direct use of the structure members.
|
|
|
++ */
|
|
|
++typedef struct xSTATIC_TCB
|
|
|
++{
|
|
|
++ struct rt_thread thread;
|
|
|
++ #if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++ void * pxTaskTag;
|
|
|
++ #endif
|
|
|
++ #if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++ uint32_t ulNotifiedValue[ configTASK_NOTIFICATION_ARRAY_ENTRIES ];
|
|
|
++ uint8_t ucNotifyState[ configTASK_NOTIFICATION_ARRAY_ENTRIES ];
|
|
|
++ #endif
|
|
|
++ #if ( INCLUDE_xTaskAbortDelay == 1 )
|
|
|
++ uint8_t ucDelayAborted;
|
|
|
++ #endif
|
|
|
++} StaticTask_t;
|
|
|
++
|
|
|
++typedef struct
|
|
|
++{
|
|
|
++ struct rt_ipc_object *rt_ipc;
|
|
|
++ struct rt_messagequeue ipc_obj;
|
|
|
++} StaticQueue_t;
|
|
|
++
|
|
|
++typedef struct
|
|
|
++{
|
|
|
++ struct rt_ipc_object *rt_ipc;
|
|
|
++ union
|
|
|
++ {
|
|
|
++ struct rt_semaphore_wrapper semaphore;
|
|
|
++ struct rt_mutex mutex;
|
|
|
++ } ipc_obj;
|
|
|
++} StaticSemaphore_t;
|
|
|
++
|
|
|
++typedef struct xSTATIC_EVENT_GROUP
|
|
|
++{
|
|
|
++ struct rt_event event;
|
|
|
++} StaticEventGroup_t;
|
|
|
++
|
|
|
++typedef struct xSTATIC_TIMER
|
|
|
++{
|
|
|
++ struct rt_timer timer;
|
|
|
++ void * pvTimerID;
|
|
|
++} StaticTimer_t;
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#endif /* INC_FREERTOS_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/event_groups.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/event_groups.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..591814d37f
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/event_groups.h
|
|
|
+@@ -0,0 +1,621 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef EVENT_GROUPS_H
|
|
|
++#define EVENT_GROUPS_H
|
|
|
++
|
|
|
++#ifndef INC_FREERTOS_H
|
|
|
++ #error "include FreeRTOS.h" must appear in source files before "include event_groups.h"
|
|
|
++#endif
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++/**
|
|
|
++ * An event group is a collection of bits to which an application can assign a
|
|
|
++ * meaning. For example, an application may create an event group to convey
|
|
|
++ * the status of various CAN bus related events in which bit 0 might mean "A CAN
|
|
|
++ * message has been received and is ready for processing", bit 1 might mean "The
|
|
|
++ * application has queued a message that is ready for sending onto the CAN
|
|
|
++ * network", and bit 2 might mean "It is time to send a SYNC message onto the
|
|
|
++ * CAN network" etc. A task can then test the bit values to see which events
|
|
|
++ * are active, and optionally enter the Blocked state to wait for a specified
|
|
|
++ * bit or a group of specified bits to be active. To continue the CAN bus
|
|
|
++ * example, a CAN controlling task can enter the Blocked state (and therefore
|
|
|
++ * not consume any processing time) until either bit 0, bit 1 or bit 2 are
|
|
|
++ * active, at which time the bit that was actually active would inform the task
|
|
|
++ * which action it had to take (process a received message, send a message, or
|
|
|
++ * send a SYNC).
|
|
|
++ *
|
|
|
++ * The event groups implementation contains intelligence to avoid race
|
|
|
++ * conditions that would otherwise occur were an application to use a simple
|
|
|
++ * variable for the same purpose. This is particularly important with respect
|
|
|
++ * to when a bit within an event group is to be cleared, and when bits have to
|
|
|
++ * be set and then tested atomically - as is the case where event groups are
|
|
|
++ * used to create a synchronisation point between multiple tasks (a
|
|
|
++ * 'rendezvous').
|
|
|
++ *
|
|
|
++ * \defgroup EventGroup
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ *
|
|
|
++ * Type by which event groups are referenced. For example, a call to
|
|
|
++ * xEventGroupCreate() returns an EventGroupHandle_t variable that can then
|
|
|
++ * be used as a parameter to other event group functions.
|
|
|
++ *
|
|
|
++ * \defgroup EventGroupHandle_t EventGroupHandle_t
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++struct EventGroupDef_t;
|
|
|
++typedef struct EventGroupDef_t * EventGroupHandle_t;
|
|
|
++
|
|
|
++/*
|
|
|
++ * The type that holds event bits always matches TickType_t - therefore the
|
|
|
++ * number of bits it holds is set by configUSE_16_BIT_TICKS (16 bits if set to 1,
|
|
|
++ * 32 bits if set to 0.
|
|
|
++ *
|
|
|
++ * \defgroup EventBits_t EventBits_t
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++typedef TickType_t EventBits_t;
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventGroupHandle_t xEventGroupCreate( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Create a new event group.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, event groups use a [small]
|
|
|
++ * block of memory, in which the event group's structure is stored. If an event
|
|
|
++ * groups is created using xEventGroupCreate() then the required memory is
|
|
|
++ * automatically dynamically allocated inside the xEventGroupCreate() function.
|
|
|
++ * (see https://www.FreeRTOS.org/a00111.html). If an event group is created
|
|
|
++ * using xEventGroupCreateStatic() then the application writer must instead
|
|
|
++ * provide the memory that will get used by the event group.
|
|
|
++ * xEventGroupCreateStatic() therefore allows an event group to be created
|
|
|
++ * without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Although event groups are not related to ticks, for internal implementation
|
|
|
++ * reasons the number of bits available for use in an event group is dependent
|
|
|
++ * on the configUSE_16_BIT_TICKS setting in FreeRTOSConfig.h. If
|
|
|
++ * configUSE_16_BIT_TICKS is 1 then each event group contains 8 usable bits (bit
|
|
|
++ * 0 to bit 7). If configUSE_16_BIT_TICKS is set to 0 then each event group has
|
|
|
++ * 24 usable bits (bit 0 to bit 23). The EventBits_t type is used to store
|
|
|
++ * event bits within an event group.
|
|
|
++ *
|
|
|
++ * @return If the event group was created then a handle to the event group is
|
|
|
++ * returned. If there was insufficient FreeRTOS heap available to create the
|
|
|
++ * event group then NULL is returned. See https://www.FreeRTOS.org/a00111.html
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * // Declare a variable to hold the created event group.
|
|
|
++ * EventGroupHandle_t xCreatedEventGroup;
|
|
|
++ *
|
|
|
++ * // Attempt to create the event group.
|
|
|
++ * xCreatedEventGroup = xEventGroupCreate();
|
|
|
++ *
|
|
|
++ * // Was the event group created successfully?
|
|
|
++ * if( xCreatedEventGroup == NULL )
|
|
|
++ * {
|
|
|
++ * // The event group was not created because there was insufficient
|
|
|
++ * // FreeRTOS heap available.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // The event group was created.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xEventGroupCreate xEventGroupCreate
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ EventGroupHandle_t xEventGroupCreate( void );
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventGroupHandle_t xEventGroupCreateStatic( EventGroupHandle_t * pxEventGroupBuffer );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Create a new event group.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, event groups use a [small]
|
|
|
++ * block of memory, in which the event group's structure is stored. If an event
|
|
|
++ * groups is created using xEventGroupCreate() then the required memory is
|
|
|
++ * automatically dynamically allocated inside the xEventGroupCreate() function.
|
|
|
++ * (see https://www.FreeRTOS.org/a00111.html). If an event group is created
|
|
|
++ * using xEventGroupCreateStatic() then the application writer must instead
|
|
|
++ * provide the memory that will get used by the event group.
|
|
|
++ * xEventGroupCreateStatic() therefore allows an event group to be created
|
|
|
++ * without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Although event groups are not related to ticks, for internal implementation
|
|
|
++ * reasons the number of bits available for use in an event group is dependent
|
|
|
++ * on the configUSE_16_BIT_TICKS setting in FreeRTOSConfig.h. If
|
|
|
++ * configUSE_16_BIT_TICKS is 1 then each event group contains 8 usable bits (bit
|
|
|
++ * 0 to bit 7). If configUSE_16_BIT_TICKS is set to 0 then each event group has
|
|
|
++ * 24 usable bits (bit 0 to bit 23). The EventBits_t type is used to store
|
|
|
++ * event bits within an event group.
|
|
|
++ *
|
|
|
++ * @param pxEventGroupBuffer pxEventGroupBuffer must point to a variable of type
|
|
|
++ * StaticEventGroup_t, which will be then be used to hold the event group's data
|
|
|
++ * structures, removing the need for the memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If the event group was created then a handle to the event group is
|
|
|
++ * returned. If pxEventGroupBuffer was NULL then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * // StaticEventGroup_t is a publicly accessible structure that has the same
|
|
|
++ * // size and alignment requirements as the real event group structure. It is
|
|
|
++ * // provided as a mechanism for applications to know the size of the event
|
|
|
++ * // group (which is dependent on the architecture and configuration file
|
|
|
++ * // settings) without breaking the strict data hiding policy by exposing the
|
|
|
++ * // real event group internals. This StaticEventGroup_t variable is passed
|
|
|
++ * // into the xSemaphoreCreateEventGroupStatic() function and is used to store
|
|
|
++ * // the event group's data structures
|
|
|
++ * StaticEventGroup_t xEventGroupBuffer;
|
|
|
++ *
|
|
|
++ * // Create the event group without dynamically allocating any memory.
|
|
|
++ * xEventGroup = xEventGroupCreateStatic( &xEventGroupBuffer );
|
|
|
++ * @endcode
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ EventGroupHandle_t xEventGroupCreateStatic( StaticEventGroup_t * pxEventGroupBuffer );
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
|
|
|
++ * const EventBits_t uxBitsToWaitFor,
|
|
|
++ * const BaseType_t xClearOnExit,
|
|
|
++ * const BaseType_t xWaitForAllBits,
|
|
|
++ * const TickType_t xTicksToWait );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * [Potentially] block to wait for one or more bits to be set within a
|
|
|
++ * previously created event group.
|
|
|
++ *
|
|
|
++ * This function cannot be called from an interrupt.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group in which the bits are being tested. The
|
|
|
++ * event group must have previously been created using a call to
|
|
|
++ * xEventGroupCreate().
|
|
|
++ *
|
|
|
++ * @param uxBitsToWaitFor A bitwise value that indicates the bit or bits to test
|
|
|
++ * inside the event group. For example, to wait for bit 0 and/or bit 2 set
|
|
|
++ * uxBitsToWaitFor to 0x05. To wait for bits 0 and/or bit 1 and/or bit 2 set
|
|
|
++ * uxBitsToWaitFor to 0x07. Etc.
|
|
|
++ *
|
|
|
++ * @param xClearOnExit If xClearOnExit is set to pdTRUE then any bits within
|
|
|
++ * uxBitsToWaitFor that are set within the event group will be cleared before
|
|
|
++ * xEventGroupWaitBits() returns if the wait condition was met (if the function
|
|
|
++ * returns for a reason other than a timeout). If xClearOnExit is set to
|
|
|
++ * pdFALSE then the bits set in the event group are not altered when the call to
|
|
|
++ * xEventGroupWaitBits() returns.
|
|
|
++ *
|
|
|
++ * @param xWaitForAllBits If xWaitForAllBits is set to pdTRUE then
|
|
|
++ * xEventGroupWaitBits() will return when either all the bits in uxBitsToWaitFor
|
|
|
++ * are set or the specified block time expires. If xWaitForAllBits is set to
|
|
|
++ * pdFALSE then xEventGroupWaitBits() will return when any one of the bits set
|
|
|
++ * in uxBitsToWaitFor is set or the specified block time expires. The block
|
|
|
++ * time is specified by the xTicksToWait parameter.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time (specified in 'ticks') to wait
|
|
|
++ * for one/all (depending on the xWaitForAllBits value) of the bits specified by
|
|
|
++ * uxBitsToWaitFor to become set.
|
|
|
++ *
|
|
|
++ * @return The value of the event group at the time either the bits being waited
|
|
|
++ * for became set, or the block time expired. Test the return value to know
|
|
|
++ * which bits were set. If xEventGroupWaitBits() returned because its timeout
|
|
|
++ * expired then not all the bits being waited for will be set. If
|
|
|
++ * xEventGroupWaitBits() returned because the bits it was waiting for were set
|
|
|
++ * then the returned value is the event group value before any bits were
|
|
|
++ * automatically cleared in the case that xClearOnExit parameter was set to
|
|
|
++ * pdTRUE.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * #define BIT_0 ( 1 << 0 )
|
|
|
++ * #define BIT_4 ( 1 << 4 )
|
|
|
++ *
|
|
|
++ * void aFunction( EventGroupHandle_t xEventGroup )
|
|
|
++ * {
|
|
|
++ * EventBits_t uxBits;
|
|
|
++ * const TickType_t xTicksToWait = 100 / portTICK_PERIOD_MS;
|
|
|
++ *
|
|
|
++ * // Wait a maximum of 100ms for either bit 0 or bit 4 to be set within
|
|
|
++ * // the event group. Clear the bits before exiting.
|
|
|
++ * uxBits = xEventGroupWaitBits(
|
|
|
++ * xEventGroup, // The event group being tested.
|
|
|
++ * BIT_0 | BIT_4, // The bits within the event group to wait for.
|
|
|
++ * pdTRUE, // BIT_0 and BIT_4 should be cleared before returning.
|
|
|
++ * pdFALSE, // Don't wait for both bits, either bit will do.
|
|
|
++ * xTicksToWait ); // Wait a maximum of 100ms for either bit to be set.
|
|
|
++ *
|
|
|
++ * if( ( uxBits & ( BIT_0 | BIT_4 ) ) == ( BIT_0 | BIT_4 ) )
|
|
|
++ * {
|
|
|
++ * // xEventGroupWaitBits() returned because both bits were set.
|
|
|
++ * }
|
|
|
++ * else if( ( uxBits & BIT_0 ) != 0 )
|
|
|
++ * {
|
|
|
++ * // xEventGroupWaitBits() returned because just BIT_0 was set.
|
|
|
++ * }
|
|
|
++ * else if( ( uxBits & BIT_4 ) != 0 )
|
|
|
++ * {
|
|
|
++ * // xEventGroupWaitBits() returned because just BIT_4 was set.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // xEventGroupWaitBits() returned because xTicksToWait ticks passed
|
|
|
++ * // without either BIT_0 or BIT_4 becoming set.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xEventGroupWaitBits xEventGroupWaitBits
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToWaitFor,
|
|
|
++ const BaseType_t xClearOnExit,
|
|
|
++ const BaseType_t xWaitForAllBits,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventBits_t xEventGroupClearBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToClear );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Clear bits within an event group. This function cannot be called from an
|
|
|
++ * interrupt.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group in which the bits are to be cleared.
|
|
|
++ *
|
|
|
++ * @param uxBitsToClear A bitwise value that indicates the bit or bits to clear
|
|
|
++ * in the event group. For example, to clear bit 3 only, set uxBitsToClear to
|
|
|
++ * 0x08. To clear bit 3 and bit 0 set uxBitsToClear to 0x09.
|
|
|
++ *
|
|
|
++ * @return The value of the event group before the specified bits were cleared.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * #define BIT_0 ( 1 << 0 )
|
|
|
++ * #define BIT_4 ( 1 << 4 )
|
|
|
++ *
|
|
|
++ * void aFunction( EventGroupHandle_t xEventGroup )
|
|
|
++ * {
|
|
|
++ * EventBits_t uxBits;
|
|
|
++ *
|
|
|
++ * // Clear bit 0 and bit 4 in xEventGroup.
|
|
|
++ * uxBits = xEventGroupClearBits(
|
|
|
++ * xEventGroup, // The event group being updated.
|
|
|
++ * BIT_0 | BIT_4 );// The bits being cleared.
|
|
|
++ *
|
|
|
++ * if( ( uxBits & ( BIT_0 | BIT_4 ) ) == ( BIT_0 | BIT_4 ) )
|
|
|
++ * {
|
|
|
++ * // Both bit 0 and bit 4 were set before xEventGroupClearBits() was
|
|
|
++ * // called. Both will now be clear (not set).
|
|
|
++ * }
|
|
|
++ * else if( ( uxBits & BIT_0 ) != 0 )
|
|
|
++ * {
|
|
|
++ * // Bit 0 was set before xEventGroupClearBits() was called. It will
|
|
|
++ * // now be clear.
|
|
|
++ * }
|
|
|
++ * else if( ( uxBits & BIT_4 ) != 0 )
|
|
|
++ * {
|
|
|
++ * // Bit 4 was set before xEventGroupClearBits() was called. It will
|
|
|
++ * // now be clear.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // Neither bit 0 nor bit 4 were set in the first place.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xEventGroupClearBits xEventGroupClearBits
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++EventBits_t xEventGroupClearBits( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToClear );
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xEventGroupClearBitsFromISR( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * A version of xEventGroupClearBits() that can be called from an interrupt.
|
|
|
++ *
|
|
|
++ * Setting bits in an event group is not a deterministic operation because there
|
|
|
++ * are an unknown number of tasks that may be waiting for the bit or bits being
|
|
|
++ * set. FreeRTOS does not allow nondeterministic operations to be performed
|
|
|
++ * while interrupts are disabled, so protects event groups that are accessed
|
|
|
++ * from tasks by suspending the scheduler rather than disabling interrupts. As
|
|
|
++ * a result event groups cannot be accessed directly from an interrupt service
|
|
|
++ * routine. Therefore xEventGroupClearBitsFromISR() sends a message to the
|
|
|
++ * timer task to have the clear operation performed in the context of the timer
|
|
|
++ * task.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group in which the bits are to be cleared.
|
|
|
++ *
|
|
|
++ * @param uxBitsToClear A bitwise value that indicates the bit or bits to clear.
|
|
|
++ * For example, to clear bit 3 only, set uxBitsToClear to 0x08. To clear bit 3
|
|
|
++ * and bit 0 set uxBitsToClear to 0x09.
|
|
|
++ *
|
|
|
++ * @return If the request to execute the function was posted successfully then
|
|
|
++ * pdPASS is returned, otherwise pdFALSE is returned. pdFALSE will be returned
|
|
|
++ * if the timer service queue was full.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * #define BIT_0 ( 1 << 0 )
|
|
|
++ * #define BIT_4 ( 1 << 4 )
|
|
|
++ *
|
|
|
++ * // An event group which it is assumed has already been created by a call to
|
|
|
++ * // xEventGroupCreate().
|
|
|
++ * EventGroupHandle_t xEventGroup;
|
|
|
++ *
|
|
|
++ * void anInterruptHandler( void )
|
|
|
++ * {
|
|
|
++ * // Clear bit 0 and bit 4 in xEventGroup.
|
|
|
++ * xResult = xEventGroupClearBitsFromISR(
|
|
|
++ * xEventGroup, // The event group being updated.
|
|
|
++ * BIT_0 | BIT_4 ); // The bits being set.
|
|
|
++ *
|
|
|
++ * if( xResult == pdPASS )
|
|
|
++ * {
|
|
|
++ * // The message was posted successfully.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xEventGroupClearBitsFromISR xEventGroupClearBitsFromISR
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++BaseType_t xEventGroupClearBitsFromISR( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToClear );
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Set bits within an event group.
|
|
|
++ * This function cannot be called from an interrupt. xEventGroupSetBitsFromISR()
|
|
|
++ * is a version that can be called from an interrupt.
|
|
|
++ *
|
|
|
++ * Setting bits in an event group will automatically unblock tasks that are
|
|
|
++ * blocked waiting for the bits.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group in which the bits are to be set.
|
|
|
++ *
|
|
|
++ * @param uxBitsToSet A bitwise value that indicates the bit or bits to set.
|
|
|
++ * For example, to set bit 3 only, set uxBitsToSet to 0x08. To set bit 3
|
|
|
++ * and bit 0 set uxBitsToSet to 0x09.
|
|
|
++ *
|
|
|
++ * @return The value of the event group at the time the call to
|
|
|
++ * xEventGroupSetBits() returns. There are two reasons why the returned value
|
|
|
++ * might have the bits specified by the uxBitsToSet parameter cleared. First,
|
|
|
++ * if setting a bit results in a task that was waiting for the bit leaving the
|
|
|
++ * blocked state then it is possible the bit will be cleared automatically
|
|
|
++ * (see the xClearBitOnExit parameter of xEventGroupWaitBits()). Second, any
|
|
|
++ * unblocked (or otherwise Ready state) task that has a priority above that of
|
|
|
++ * the task that called xEventGroupSetBits() will execute and may change the
|
|
|
++ * event group value before the call to xEventGroupSetBits() returns.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * #define BIT_0 ( 1 << 0 )
|
|
|
++ * #define BIT_4 ( 1 << 4 )
|
|
|
++ *
|
|
|
++ * void aFunction( EventGroupHandle_t xEventGroup )
|
|
|
++ * {
|
|
|
++ * EventBits_t uxBits;
|
|
|
++ *
|
|
|
++ * // Set bit 0 and bit 4 in xEventGroup.
|
|
|
++ * uxBits = xEventGroupSetBits(
|
|
|
++ * xEventGroup, // The event group being updated.
|
|
|
++ * BIT_0 | BIT_4 );// The bits being set.
|
|
|
++ *
|
|
|
++ * if( ( uxBits & ( BIT_0 | BIT_4 ) ) == ( BIT_0 | BIT_4 ) )
|
|
|
++ * {
|
|
|
++ * // Both bit 0 and bit 4 remained set when the function returned.
|
|
|
++ * }
|
|
|
++ * else if( ( uxBits & BIT_0 ) != 0 )
|
|
|
++ * {
|
|
|
++ * // Bit 0 remained set when the function returned, but bit 4 was
|
|
|
++ * // cleared. It might be that bit 4 was cleared automatically as a
|
|
|
++ * // task that was waiting for bit 4 was removed from the Blocked
|
|
|
++ * // state.
|
|
|
++ * }
|
|
|
++ * else if( ( uxBits & BIT_4 ) != 0 )
|
|
|
++ * {
|
|
|
++ * // Bit 4 remained set when the function returned, but bit 0 was
|
|
|
++ * // cleared. It might be that bit 0 was cleared automatically as a
|
|
|
++ * // task that was waiting for bit 0 was removed from the Blocked
|
|
|
++ * // state.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // Neither bit 0 nor bit 4 remained set. It might be that a task
|
|
|
++ * // was waiting for both of the bits to be set, and the bits were
|
|
|
++ * // cleared as the task left the Blocked state.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xEventGroupSetBits xEventGroupSetBits
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToSet );
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * A version of xEventGroupSetBits() that can be called from an interrupt.
|
|
|
++ *
|
|
|
++ * Setting bits in an event group is not a deterministic operation because there
|
|
|
++ * are an unknown number of tasks that may be waiting for the bit or bits being
|
|
|
++ * set. FreeRTOS does not allow nondeterministic operations to be performed in
|
|
|
++ * interrupts or from critical sections. Therefore xEventGroupSetBitsFromISR()
|
|
|
++ * sends a message to the timer task to have the set operation performed in the
|
|
|
++ * context of the timer task - where a scheduler lock is used in place of a
|
|
|
++ * critical section.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group in which the bits are to be set.
|
|
|
++ *
|
|
|
++ * @param uxBitsToSet A bitwise value that indicates the bit or bits to set.
|
|
|
++ * For example, to set bit 3 only, set uxBitsToSet to 0x08. To set bit 3
|
|
|
++ * and bit 0 set uxBitsToSet to 0x09.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken As mentioned above, calling this function
|
|
|
++ * will result in a message being sent to the timer daemon task. If the
|
|
|
++ * priority of the timer daemon task is higher than the priority of the
|
|
|
++ * currently running task (the task the interrupt interrupted) then
|
|
|
++ * *pxHigherPriorityTaskWoken will be set to pdTRUE by
|
|
|
++ * xEventGroupSetBitsFromISR(), indicating that a context switch should be
|
|
|
++ * requested before the interrupt exits. For that reason
|
|
|
++ * *pxHigherPriorityTaskWoken must be initialised to pdFALSE. See the
|
|
|
++ * example code below.
|
|
|
++ *
|
|
|
++ * @return If the request to execute the function was posted successfully then
|
|
|
++ * pdPASS is returned, otherwise pdFALSE is returned. pdFALSE will be returned
|
|
|
++ * if the timer service queue was full.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * #define BIT_0 ( 1 << 0 )
|
|
|
++ * #define BIT_4 ( 1 << 4 )
|
|
|
++ *
|
|
|
++ * // An event group which it is assumed has already been created by a call to
|
|
|
++ * // xEventGroupCreate().
|
|
|
++ * EventGroupHandle_t xEventGroup;
|
|
|
++ *
|
|
|
++ * void anInterruptHandler( void )
|
|
|
++ * {
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken, xResult;
|
|
|
++ *
|
|
|
++ * // xHigherPriorityTaskWoken must be initialised to pdFALSE.
|
|
|
++ * xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Set bit 0 and bit 4 in xEventGroup.
|
|
|
++ * xResult = xEventGroupSetBitsFromISR(
|
|
|
++ * xEventGroup, // The event group being updated.
|
|
|
++ * BIT_0 | BIT_4 // The bits being set.
|
|
|
++ * &xHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * // Was the message posted successfully?
|
|
|
++ * if( xResult == pdPASS )
|
|
|
++ * {
|
|
|
++ * // If xHigherPriorityTaskWoken is now set to pdTRUE then a context
|
|
|
++ * // switch should be requested. The macro used is port specific and
|
|
|
++ * // will be either portYIELD_FROM_ISR() or portEND_SWITCHING_ISR() -
|
|
|
++ * // refer to the documentation page for the port being used.
|
|
|
++ * portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xEventGroupSetBitsFromISR xEventGroupSetBitsFromISR
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,
|
|
|
++ const EventBits_t uxBitsToSet,
|
|
|
++ BaseType_t * pxHigherPriorityTaskWoken );
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventBits_t xEventGroupGetBits( EventGroupHandle_t xEventGroup );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Returns the current value of the bits in an event group. This function
|
|
|
++ * cannot be used from an interrupt.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group being queried.
|
|
|
++ *
|
|
|
++ * @return The event group bits at the time xEventGroupGetBits() was called.
|
|
|
++ *
|
|
|
++ * \defgroup xEventGroupGetBits xEventGroupGetBits
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++#define xEventGroupGetBits( xEventGroup ) xEventGroupClearBits( xEventGroup, 0 )
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * EventBits_t xEventGroupGetBitsFromISR( EventGroupHandle_t xEventGroup );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * A version of xEventGroupGetBits() that can be called from an ISR.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group being queried.
|
|
|
++ *
|
|
|
++ * @return The event group bits at the time xEventGroupGetBitsFromISR() was called.
|
|
|
++ *
|
|
|
++ * \defgroup xEventGroupGetBitsFromISR xEventGroupGetBitsFromISR
|
|
|
++ * \ingroup EventGroup
|
|
|
++ */
|
|
|
++EventBits_t xEventGroupGetBitsFromISR( EventGroupHandle_t xEventGroup );
|
|
|
++
|
|
|
++/**
|
|
|
++ * event_groups.h
|
|
|
++ * @code{c}
|
|
|
++ * void xEventGroupDelete( EventGroupHandle_t xEventGroup );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Delete an event group that was previously created by a call to
|
|
|
++ * xEventGroupCreate(). Tasks that are blocked on the event group will be
|
|
|
++ * unblocked and obtain 0 as the event group's value.
|
|
|
++ *
|
|
|
++ * @param xEventGroup The event group being deleted.
|
|
|
++ */
|
|
|
++void vEventGroupDelete( EventGroupHandle_t xEventGroup );
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#endif /* EVENT_GROUPS_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/list.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/list.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..dde1f3572e
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/list.h
|
|
|
+@@ -0,0 +1,416 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.3
|
|
|
++ * Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/*
|
|
|
++ * This is the list implementation used by the scheduler. While it is tailored
|
|
|
++ * heavily for the schedulers needs, it is also available for use by
|
|
|
++ * application code.
|
|
|
++ *
|
|
|
++ * list_ts can only store pointers to list_item_ts. Each ListItem_t contains a
|
|
|
++ * numeric value (xItemValue). Most of the time the lists are sorted in
|
|
|
++ * descending item value order.
|
|
|
++ *
|
|
|
++ * Lists are created already containing one list item. The value of this
|
|
|
++ * item is the maximum possible that can be stored, it is therefore always at
|
|
|
++ * the end of the list and acts as a marker. The list member pxHead always
|
|
|
++ * points to this marker - even though it is at the tail of the list. This
|
|
|
++ * is because the tail contains a wrap back pointer to the true head of
|
|
|
++ * the list.
|
|
|
++ *
|
|
|
++ * In addition to it's value, each list item contains a pointer to the next
|
|
|
++ * item in the list (pxNext), a pointer to the list it is in (pxContainer)
|
|
|
++ * and a pointer to back to the object that contains it. These later two
|
|
|
++ * pointers are included for efficiency of list manipulation. There is
|
|
|
++ * effectively a two way link between the object containing the list item and
|
|
|
++ * the list item itself.
|
|
|
++ *
|
|
|
++ *
|
|
|
++ * \page ListIntroduction List Implementation
|
|
|
++ * \ingroup FreeRTOSIntro
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef INC_FREERTOS_H
|
|
|
++ #error "FreeRTOS.h must be included before list.h"
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef LIST_H
|
|
|
++#define LIST_H
|
|
|
++
|
|
|
++/*
|
|
|
++ * The list structure members are modified from within interrupts, and therefore
|
|
|
++ * by rights should be declared volatile. However, they are only modified in a
|
|
|
++ * functionally atomic way (within critical sections of with the scheduler
|
|
|
++ * suspended) and are either passed by reference into a function or indexed via
|
|
|
++ * a volatile variable. Therefore, in all use cases tested so far, the volatile
|
|
|
++ * qualifier can be omitted in order to provide a moderate performance
|
|
|
++ * improvement without adversely affecting functional behaviour. The assembly
|
|
|
++ * instructions generated by the IAR, ARM and GCC compilers when the respective
|
|
|
++ * compiler's options were set for maximum optimisation has been inspected and
|
|
|
++ * deemed to be as intended. That said, as compiler technology advances, and
|
|
|
++ * especially if aggressive cross module optimisation is used (a use case that
|
|
|
++ * has not been exercised to any great extend) then it is feasible that the
|
|
|
++ * volatile qualifier will be needed for correct optimisation. It is expected
|
|
|
++ * that a compiler removing essential code because, without the volatile
|
|
|
++ * qualifier on the list structure members and with aggressive cross module
|
|
|
++ * optimisation, the compiler deemed the code unnecessary will result in
|
|
|
++ * complete and obvious failure of the scheduler. If this is ever experienced
|
|
|
++ * then the volatile qualifier can be inserted in the relevant places within the
|
|
|
++ * list structures by simply defining configLIST_VOLATILE to volatile in
|
|
|
++ * FreeRTOSConfig.h (as per the example at the bottom of this comment block).
|
|
|
++ * If configLIST_VOLATILE is not defined then the preprocessor directives below
|
|
|
++ * will simply #define configLIST_VOLATILE away completely.
|
|
|
++ *
|
|
|
++ * To use volatile list structure members then add the following line to
|
|
|
++ * FreeRTOSConfig.h (without the quotes):
|
|
|
++ * "#define configLIST_VOLATILE volatile"
|
|
|
++ */
|
|
|
++#ifndef configLIST_VOLATILE
|
|
|
++ #define configLIST_VOLATILE
|
|
|
++#endif /* configSUPPORT_CROSS_MODULE_OPTIMISATION */
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++/* Macros that can be used to place known values within the list structures,
|
|
|
++ * then check that the known values do not get corrupted during the execution of
|
|
|
++ * the application. These may catch the list data structures being overwritten in
|
|
|
++ * memory. They will not catch data errors caused by incorrect configuration or
|
|
|
++ * use of FreeRTOS.*/
|
|
|
++#if ( configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES == 0 )
|
|
|
++ /* Define the macros to do nothing. */
|
|
|
++ #define listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE
|
|
|
++ #define listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE
|
|
|
++ #define listFIRST_LIST_INTEGRITY_CHECK_VALUE
|
|
|
++ #define listSECOND_LIST_INTEGRITY_CHECK_VALUE
|
|
|
++ #define listSET_FIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE( pxItem )
|
|
|
++ #define listSET_SECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE( pxItem )
|
|
|
++ #define listSET_LIST_INTEGRITY_CHECK_1_VALUE( pxList )
|
|
|
++ #define listSET_LIST_INTEGRITY_CHECK_2_VALUE( pxList )
|
|
|
++ #define listTEST_LIST_ITEM_INTEGRITY( pxItem )
|
|
|
++ #define listTEST_LIST_INTEGRITY( pxList )
|
|
|
++#else /* if ( configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES == 0 ) */
|
|
|
++ /* Define macros that add new members into the list structures. */
|
|
|
++ #define listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE TickType_t xListItemIntegrityValue1;
|
|
|
++ #define listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE TickType_t xListItemIntegrityValue2;
|
|
|
++ #define listFIRST_LIST_INTEGRITY_CHECK_VALUE TickType_t xListIntegrityValue1;
|
|
|
++ #define listSECOND_LIST_INTEGRITY_CHECK_VALUE TickType_t xListIntegrityValue2;
|
|
|
++
|
|
|
++/* Define macros that set the new structure members to known values. */
|
|
|
++ #define listSET_FIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE( pxItem ) ( pxItem )->xListItemIntegrityValue1 = pdINTEGRITY_CHECK_VALUE
|
|
|
++ #define listSET_SECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE( pxItem ) ( pxItem )->xListItemIntegrityValue2 = pdINTEGRITY_CHECK_VALUE
|
|
|
++ #define listSET_LIST_INTEGRITY_CHECK_1_VALUE( pxList ) ( pxList )->xListIntegrityValue1 = pdINTEGRITY_CHECK_VALUE
|
|
|
++ #define listSET_LIST_INTEGRITY_CHECK_2_VALUE( pxList ) ( pxList )->xListIntegrityValue2 = pdINTEGRITY_CHECK_VALUE
|
|
|
++
|
|
|
++/* Define macros that will assert if one of the structure members does not
|
|
|
++ * contain its expected value. */
|
|
|
++ #define listTEST_LIST_ITEM_INTEGRITY( pxItem ) configASSERT( ( ( pxItem )->xListItemIntegrityValue1 == pdINTEGRITY_CHECK_VALUE ) && ( ( pxItem )->xListItemIntegrityValue2 == pdINTEGRITY_CHECK_VALUE ) )
|
|
|
++ #define listTEST_LIST_INTEGRITY( pxList ) configASSERT( ( ( pxList )->xListIntegrityValue1 == pdINTEGRITY_CHECK_VALUE ) && ( ( pxList )->xListIntegrityValue2 == pdINTEGRITY_CHECK_VALUE ) )
|
|
|
++#endif /* configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES */
|
|
|
++
|
|
|
++
|
|
|
++/*
|
|
|
++ * Definition of the only type of object that a list can contain.
|
|
|
++ */
|
|
|
++struct xLIST;
|
|
|
++struct xLIST_ITEM
|
|
|
++{
|
|
|
++ listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++ configLIST_VOLATILE TickType_t xItemValue; /*< The value being listed. In most cases this is used to sort the list in descending order. */
|
|
|
++ struct xLIST_ITEM * configLIST_VOLATILE pxNext; /*< Pointer to the next ListItem_t in the list. */
|
|
|
++ struct xLIST_ITEM * configLIST_VOLATILE pxPrevious; /*< Pointer to the previous ListItem_t in the list. */
|
|
|
++ void * pvOwner; /*< Pointer to the object (normally a TCB) that contains the list item. There is therefore a two way link between the object containing the list item and the list item itself. */
|
|
|
++ struct xLIST * configLIST_VOLATILE pxContainer; /*< Pointer to the list in which this list item is placed (if any). */
|
|
|
++ listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++};
|
|
|
++typedef struct xLIST_ITEM ListItem_t; /* For some reason lint wants this as two separate definitions. */
|
|
|
++
|
|
|
++struct xMINI_LIST_ITEM
|
|
|
++{
|
|
|
++ listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++ configLIST_VOLATILE TickType_t xItemValue;
|
|
|
++ struct xLIST_ITEM * configLIST_VOLATILE pxNext;
|
|
|
++ struct xLIST_ITEM * configLIST_VOLATILE pxPrevious;
|
|
|
++};
|
|
|
++typedef struct xMINI_LIST_ITEM MiniListItem_t;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Definition of the type of queue used by the scheduler.
|
|
|
++ */
|
|
|
++typedef struct xLIST
|
|
|
++{
|
|
|
++ listFIRST_LIST_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++ volatile UBaseType_t uxNumberOfItems;
|
|
|
++ ListItem_t * configLIST_VOLATILE pxIndex; /*< Used to walk through the list. Points to the last item returned by a call to listGET_OWNER_OF_NEXT_ENTRY (). */
|
|
|
++ MiniListItem_t xListEnd; /*< List item that contains the maximum possible item value meaning it is always at the end of the list and is therefore used as a marker. */
|
|
|
++ listSECOND_LIST_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++} List_t;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to set the owner of a list item. The owner of a list item
|
|
|
++ * is the object (usually a TCB) that contains the list item.
|
|
|
++ *
|
|
|
++ * \page listSET_LIST_ITEM_OWNER listSET_LIST_ITEM_OWNER
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listSET_LIST_ITEM_OWNER( pxListItem, pxOwner ) ( ( pxListItem )->pvOwner = ( void * ) ( pxOwner ) )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to get the owner of a list item. The owner of a list item
|
|
|
++ * is the object (usually a TCB) that contains the list item.
|
|
|
++ *
|
|
|
++ * \page listGET_LIST_ITEM_OWNER listSET_LIST_ITEM_OWNER
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_LIST_ITEM_OWNER( pxListItem ) ( ( pxListItem )->pvOwner )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to set the value of the list item. In most cases the value is
|
|
|
++ * used to sort the list in descending order.
|
|
|
++ *
|
|
|
++ * \page listSET_LIST_ITEM_VALUE listSET_LIST_ITEM_VALUE
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listSET_LIST_ITEM_VALUE( pxListItem, xValue ) ( ( pxListItem )->xItemValue = ( xValue ) )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to retrieve the value of the list item. The value can
|
|
|
++ * represent anything - for example the priority of a task, or the time at
|
|
|
++ * which a task should be unblocked.
|
|
|
++ *
|
|
|
++ * \page listGET_LIST_ITEM_VALUE listGET_LIST_ITEM_VALUE
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_LIST_ITEM_VALUE( pxListItem ) ( ( pxListItem )->xItemValue )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to retrieve the value of the list item at the head of a given
|
|
|
++ * list.
|
|
|
++ *
|
|
|
++ * \page listGET_LIST_ITEM_VALUE listGET_LIST_ITEM_VALUE
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_ITEM_VALUE_OF_HEAD_ENTRY( pxList ) ( ( ( pxList )->xListEnd ).pxNext->xItemValue )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Return the list item at the head of the list.
|
|
|
++ *
|
|
|
++ * \page listGET_HEAD_ENTRY listGET_HEAD_ENTRY
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_HEAD_ENTRY( pxList ) ( ( ( pxList )->xListEnd ).pxNext )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Return the next list item.
|
|
|
++ *
|
|
|
++ * \page listGET_NEXT listGET_NEXT
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_NEXT( pxListItem ) ( ( pxListItem )->pxNext )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Return the list item that marks the end of the list
|
|
|
++ *
|
|
|
++ * \page listGET_END_MARKER listGET_END_MARKER
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_END_MARKER( pxList ) ( ( ListItem_t const * ) ( &( ( pxList )->xListEnd ) ) )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to determine if a list contains any items. The macro will
|
|
|
++ * only have the value true if the list is empty.
|
|
|
++ *
|
|
|
++ * \page listLIST_IS_EMPTY listLIST_IS_EMPTY
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listLIST_IS_EMPTY( pxList ) ( ( ( pxList )->uxNumberOfItems == ( UBaseType_t ) 0 ) ? pdTRUE : pdFALSE )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access macro to return the number of items in the list.
|
|
|
++ */
|
|
|
++#define listCURRENT_LIST_LENGTH( pxList ) ( ( pxList )->uxNumberOfItems )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access function to obtain the owner of the next entry in a list.
|
|
|
++ *
|
|
|
++ * The list member pxIndex is used to walk through a list. Calling
|
|
|
++ * listGET_OWNER_OF_NEXT_ENTRY increments pxIndex to the next item in the list
|
|
|
++ * and returns that entry's pxOwner parameter. Using multiple calls to this
|
|
|
++ * function it is therefore possible to move through every item contained in
|
|
|
++ * a list.
|
|
|
++ *
|
|
|
++ * The pxOwner parameter of a list item is a pointer to the object that owns
|
|
|
++ * the list item. In the scheduler this is normally a task control block.
|
|
|
++ * The pxOwner parameter effectively creates a two way link between the list
|
|
|
++ * item and its owner.
|
|
|
++ *
|
|
|
++ * @param pxTCB pxTCB is set to the address of the owner of the next list item.
|
|
|
++ * @param pxList The list from which the next item owner is to be returned.
|
|
|
++ *
|
|
|
++ * \page listGET_OWNER_OF_NEXT_ENTRY listGET_OWNER_OF_NEXT_ENTRY
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_OWNER_OF_NEXT_ENTRY( pxTCB, pxList ) \
|
|
|
++ { \
|
|
|
++ List_t * const pxConstList = ( pxList ); \
|
|
|
++ /* Increment the index to the next item and return the item, ensuring */ \
|
|
|
++ /* we don't return the marker used at the end of the list. */ \
|
|
|
++ ( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext; \
|
|
|
++ if( ( void * ) ( pxConstList )->pxIndex == ( void * ) &( ( pxConstList )->xListEnd ) ) \
|
|
|
++ { \
|
|
|
++ ( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext; \
|
|
|
++ } \
|
|
|
++ ( pxTCB ) = ( pxConstList )->pxIndex->pvOwner; \
|
|
|
++ }
|
|
|
++
|
|
|
++
|
|
|
++/*
|
|
|
++ * Access function to obtain the owner of the first entry in a list. Lists
|
|
|
++ * are normally sorted in ascending item value order.
|
|
|
++ *
|
|
|
++ * This function returns the pxOwner member of the first item in the list.
|
|
|
++ * The pxOwner parameter of a list item is a pointer to the object that owns
|
|
|
++ * the list item. In the scheduler this is normally a task control block.
|
|
|
++ * The pxOwner parameter effectively creates a two way link between the list
|
|
|
++ * item and its owner.
|
|
|
++ *
|
|
|
++ * @param pxList The list from which the owner of the head item is to be
|
|
|
++ * returned.
|
|
|
++ *
|
|
|
++ * \page listGET_OWNER_OF_HEAD_ENTRY listGET_OWNER_OF_HEAD_ENTRY
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++#define listGET_OWNER_OF_HEAD_ENTRY( pxList ) ( ( &( ( pxList )->xListEnd ) )->pxNext->pvOwner )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Check to see if a list item is within a list. The list item maintains a
|
|
|
++ * "container" pointer that points to the list it is in. All this macro does
|
|
|
++ * is check to see if the container and the list match.
|
|
|
++ *
|
|
|
++ * @param pxList The list we want to know if the list item is within.
|
|
|
++ * @param pxListItem The list item we want to know if is in the list.
|
|
|
++ * @return pdTRUE if the list item is in the list, otherwise pdFALSE.
|
|
|
++ */
|
|
|
++#define listIS_CONTAINED_WITHIN( pxList, pxListItem ) ( ( ( pxListItem )->pxContainer == ( pxList ) ) ? ( pdTRUE ) : ( pdFALSE ) )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Return the list a list item is contained within (referenced from).
|
|
|
++ *
|
|
|
++ * @param pxListItem The list item being queried.
|
|
|
++ * @return A pointer to the List_t object that references the pxListItem
|
|
|
++ */
|
|
|
++#define listLIST_ITEM_CONTAINER( pxListItem ) ( ( pxListItem )->pxContainer )
|
|
|
++
|
|
|
++/*
|
|
|
++ * This provides a crude means of knowing if a list has been initialised, as
|
|
|
++ * pxList->xListEnd.xItemValue is set to portMAX_DELAY by the vListInitialise()
|
|
|
++ * function.
|
|
|
++ */
|
|
|
++#define listLIST_IS_INITIALISED( pxList ) ( ( pxList )->xListEnd.xItemValue == portMAX_DELAY )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Must be called before a list is used! This initialises all the members
|
|
|
++ * of the list structure and inserts the xListEnd item into the list as a
|
|
|
++ * marker to the back of the list.
|
|
|
++ *
|
|
|
++ * @param pxList Pointer to the list being initialised.
|
|
|
++ *
|
|
|
++ * \page vListInitialise vListInitialise
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++void vListInitialise( List_t * const pxList );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Must be called before a list item is used. This sets the list container to
|
|
|
++ * null so the item does not think that it is already contained in a list.
|
|
|
++ *
|
|
|
++ * @param pxItem Pointer to the list item being initialised.
|
|
|
++ *
|
|
|
++ * \page vListInitialiseItem vListInitialiseItem
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++void vListInitialiseItem( ListItem_t * const pxItem );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Insert a list item into a list. The item will be inserted into the list in
|
|
|
++ * a position determined by its item value (descending item value order).
|
|
|
++ *
|
|
|
++ * @param pxList The list into which the item is to be inserted.
|
|
|
++ *
|
|
|
++ * @param pxNewListItem The item that is to be placed in the list.
|
|
|
++ *
|
|
|
++ * \page vListInsert vListInsert
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++void vListInsert( List_t * const pxList,
|
|
|
++ ListItem_t * const pxNewListItem );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Insert a list item into a list. The item will be inserted in a position
|
|
|
++ * such that it will be the last item within the list returned by multiple
|
|
|
++ * calls to listGET_OWNER_OF_NEXT_ENTRY.
|
|
|
++ *
|
|
|
++ * The list member pxIndex is used to walk through a list. Calling
|
|
|
++ * listGET_OWNER_OF_NEXT_ENTRY increments pxIndex to the next item in the list.
|
|
|
++ * Placing an item in a list using vListInsertEnd effectively places the item
|
|
|
++ * in the list position pointed to by pxIndex. This means that every other
|
|
|
++ * item within the list will be returned by listGET_OWNER_OF_NEXT_ENTRY before
|
|
|
++ * the pxIndex parameter again points to the item being inserted.
|
|
|
++ *
|
|
|
++ * @param pxList The list into which the item is to be inserted.
|
|
|
++ *
|
|
|
++ * @param pxNewListItem The list item to be inserted into the list.
|
|
|
++ *
|
|
|
++ * \page vListInsertEnd vListInsertEnd
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++void vListInsertEnd( List_t * const pxList,
|
|
|
++ ListItem_t * const pxNewListItem );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Remove an item from a list. The list item has a pointer to the list that
|
|
|
++ * it is in, so only the list item need be passed into the function.
|
|
|
++ *
|
|
|
++ * @param uxListRemove The item to be removed. The item will remove itself from
|
|
|
++ * the list pointed to by it's pxContainer parameter.
|
|
|
++ *
|
|
|
++ * @return The number of items that remain in the list after the list item has
|
|
|
++ * been removed.
|
|
|
++ *
|
|
|
++ * \page uxListRemove uxListRemove
|
|
|
++ * \ingroup LinkedList
|
|
|
++ */
|
|
|
++UBaseType_t uxListRemove( ListItem_t * const pxItemToRemove );
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#endif /* ifndef LIST_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/portable.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/portable.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..f0b56ae166
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/portable.h
|
|
|
+@@ -0,0 +1,141 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* Portable layer API. Each function must be defined for each port.
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++#ifndef PORTABLE_H
|
|
|
++#define PORTABLE_H
|
|
|
++
|
|
|
++#include "freertos/portmacro.h"
|
|
|
++
|
|
|
++#if portBYTE_ALIGNMENT == 32
|
|
|
++ #define portBYTE_ALIGNMENT_MASK ( 0x001f )
|
|
|
++#elif portBYTE_ALIGNMENT == 16
|
|
|
++ #define portBYTE_ALIGNMENT_MASK ( 0x000f )
|
|
|
++#elif portBYTE_ALIGNMENT == 8
|
|
|
++ #define portBYTE_ALIGNMENT_MASK ( 0x0007 )
|
|
|
++#elif portBYTE_ALIGNMENT == 4
|
|
|
++ #define portBYTE_ALIGNMENT_MASK ( 0x0003 )
|
|
|
++#elif portBYTE_ALIGNMENT == 2
|
|
|
++ #define portBYTE_ALIGNMENT_MASK ( 0x0001 )
|
|
|
++#elif portBYTE_ALIGNMENT == 1
|
|
|
++ #define portBYTE_ALIGNMENT_MASK ( 0x0000 )
|
|
|
++#else /* if portBYTE_ALIGNMENT == 32 */
|
|
|
++ #error "Invalid portBYTE_ALIGNMENT definition"
|
|
|
++#endif /* if portBYTE_ALIGNMENT == 32 */
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#ifdef configUSE_FREERTOS_PROVIDED_HEAP
|
|
|
++
|
|
|
++/* Used by heap_5.c to define the start address and size of each memory region
|
|
|
++ * that together comprise the total FreeRTOS heap space. */
|
|
|
++typedef struct HeapRegion
|
|
|
++{
|
|
|
++ uint8_t * pucStartAddress;
|
|
|
++ size_t xSizeInBytes;
|
|
|
++} HeapRegion_t;
|
|
|
++
|
|
|
++/* Used to pass information about the heap out of vPortGetHeapStats(). */
|
|
|
++typedef struct xHeapStats
|
|
|
++{
|
|
|
++ size_t xAvailableHeapSpaceInBytes; /* The total heap size currently available - this is the sum of all the free blocks, not the largest block that can be allocated. */
|
|
|
++ size_t xSizeOfLargestFreeBlockInBytes; /* The maximum size, in bytes, of all the free blocks within the heap at the time vPortGetHeapStats() is called. */
|
|
|
++ size_t xSizeOfSmallestFreeBlockInBytes; /* The minimum size, in bytes, of all the free blocks within the heap at the time vPortGetHeapStats() is called. */
|
|
|
++ size_t xNumberOfFreeBlocks; /* The number of free memory blocks within the heap at the time vPortGetHeapStats() is called. */
|
|
|
++ size_t xMinimumEverFreeBytesRemaining; /* The minimum amount of total free memory (sum of all free blocks) there has been in the heap since the system booted. */
|
|
|
++ size_t xNumberOfSuccessfulAllocations; /* The number of calls to pvPortMalloc() that have returned a valid memory block. */
|
|
|
++ size_t xNumberOfSuccessfulFrees; /* The number of calls to vPortFree() that has successfully freed a block of memory. */
|
|
|
++} HeapStats_t;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Used to define multiple heap regions for use by heap_5.c. This function
|
|
|
++ * must be called before any calls to pvPortMalloc() - not creating a task,
|
|
|
++ * queue, semaphore, mutex, software timer, event group, etc. will result in
|
|
|
++ * pvPortMalloc being called.
|
|
|
++ *
|
|
|
++ * pxHeapRegions passes in an array of HeapRegion_t structures - each of which
|
|
|
++ * defines a region of memory that can be used as the heap. The array is
|
|
|
++ * terminated by a HeapRegions_t structure that has a size of 0. The region
|
|
|
++ * with the lowest start address must appear first in the array.
|
|
|
++ */
|
|
|
++void vPortDefineHeapRegions( const HeapRegion_t * const pxHeapRegions ) PRIVILEGED_FUNCTION;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Returns a HeapStats_t structure filled with information about the current
|
|
|
++ * heap state.
|
|
|
++ */
|
|
|
++void vPortGetHeapStats( HeapStats_t * pxHeapStats );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Map to the memory management routines required for the port.
|
|
|
++ */
|
|
|
++void * pvPortMalloc( size_t xSize ) PRIVILEGED_FUNCTION;
|
|
|
++void vPortFree( void * pv ) PRIVILEGED_FUNCTION;
|
|
|
++void vPortInitialiseBlocks( void ) PRIVILEGED_FUNCTION;
|
|
|
++size_t xPortGetFreeHeapSize( void ) PRIVILEGED_FUNCTION;
|
|
|
++size_t xPortGetMinimumEverFreeHeapSize( void ) PRIVILEGED_FUNCTION;
|
|
|
++
|
|
|
++#if( configSTACK_ALLOCATION_FROM_SEPARATE_HEAP == 1 )
|
|
|
++ void *pvPortMallocStack( size_t xSize ) PRIVILEGED_FUNCTION;
|
|
|
++ void vPortFreeStack( void *pv ) PRIVILEGED_FUNCTION;
|
|
|
++#else
|
|
|
++ #define pvPortMallocStack pvPortMalloc
|
|
|
++ #define vPortFreeStack vPortFree
|
|
|
++#endif
|
|
|
++#else // configUSE_FREERTOS_PROVIDED_HEAP
|
|
|
++
|
|
|
++/*
|
|
|
++ * Map to the memory management routines required for the port.
|
|
|
++ *
|
|
|
++ * Note that libc standard malloc/free are also available for
|
|
|
++ * non-FreeRTOS-specific code, and behave the same as
|
|
|
++ * pvPortMalloc()/vPortFree().
|
|
|
++ */
|
|
|
++#define pvPortMalloc malloc
|
|
|
++#define vPortFree free
|
|
|
++#define xPortGetFreeHeapSize esp_get_free_heap_size
|
|
|
++#define xPortGetMinimumEverFreeHeapSize esp_get_minimum_free_heap_size
|
|
|
++
|
|
|
++#endif
|
|
|
++
|
|
|
++void vPortEndScheduler( void );
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#endif /* PORTABLE_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/projdefs.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/projdefs.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..8b7c01bee7
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/projdefs.h
|
|
|
+@@ -0,0 +1,64 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef PROJDEFS_H
|
|
|
++#define PROJDEFS_H
|
|
|
++
|
|
|
++/*
|
|
|
++ * Defines the prototype to which task functions must conform. Defined in this
|
|
|
++ * file to ensure the type is known before portable.h is included.
|
|
|
++ */
|
|
|
++typedef void (* TaskFunction_t)( void * );
|
|
|
++
|
|
|
++/* Converts a time in milliseconds to a time in ticks. This macro can be
|
|
|
++ * overridden by a macro of the same name defined in FreeRTOSConfig.h in case the
|
|
|
++ * definition here is not suitable for your application. */
|
|
|
++#ifndef pdMS_TO_TICKS
|
|
|
++ #define pdMS_TO_TICKS( xTimeInMs ) ( ( TickType_t ) rt_tick_from_millisecond( (rt_int32_t) xTimeInMs ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef ESP_PLATFORM
|
|
|
++#ifndef pdTICKS_TO_MS
|
|
|
++ #define pdTICKS_TO_MS( xTicks ) ( ( uint32_t ) ( xTicks ) * 1000 / configTICK_RATE_HZ )
|
|
|
++#endif
|
|
|
++#endif // ESP_PLATFORM
|
|
|
++
|
|
|
++#define pdFALSE ( ( BaseType_t ) 0 )
|
|
|
++#define pdTRUE ( ( BaseType_t ) 1 )
|
|
|
++
|
|
|
++#define pdPASS ( pdTRUE )
|
|
|
++#define pdFAIL ( pdFALSE )
|
|
|
++#define errQUEUE_EMPTY ( ( BaseType_t ) 0 )
|
|
|
++#define errQUEUE_FULL ( ( BaseType_t ) 0 )
|
|
|
++
|
|
|
++/* FreeRTOS error definitions. */
|
|
|
++#define errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY ( -1 )
|
|
|
++#define errQUEUE_BLOCKED ( -4 )
|
|
|
++#define errQUEUE_YIELD ( -5 )
|
|
|
++
|
|
|
++#endif /* PROJDEFS_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/queue.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/queue.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..57fe10ee8d
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/queue.h
|
|
|
+@@ -0,0 +1,1188 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++#ifndef QUEUE_H
|
|
|
++#define QUEUE_H
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++/**
|
|
|
++ * Type by which queues are referenced. For example, a call to xQueueCreate()
|
|
|
++ * returns an QueueHandle_t variable that can then be used as a parameter to
|
|
|
++ * xQueueSend(), xQueueReceive(), etc.
|
|
|
++ */
|
|
|
++struct QueueDefinition; /* Using old naming convention so as not to break kernel aware debuggers. */
|
|
|
++typedef struct QueueDefinition * QueueHandle_t;
|
|
|
++
|
|
|
++/* For internal use only. */
|
|
|
++#define queueSEND_TO_BACK ( ( BaseType_t ) 0 )
|
|
|
++#define queueSEND_TO_FRONT ( ( BaseType_t ) 1 )
|
|
|
++#define queueOVERWRITE ( ( BaseType_t ) 2 )
|
|
|
++
|
|
|
++/* For internal use only. These definitions *must* match those in queue.c. */
|
|
|
++#define queueQUEUE_TYPE_BASE ( ( uint8_t ) 0U )
|
|
|
++#define queueQUEUE_TYPE_SET ( ( uint8_t ) 0U )
|
|
|
++#define queueQUEUE_TYPE_MUTEX ( ( uint8_t ) 1U )
|
|
|
++#define queueQUEUE_TYPE_COUNTING_SEMAPHORE ( ( uint8_t ) 2U )
|
|
|
++#define queueQUEUE_TYPE_BINARY_SEMAPHORE ( ( uint8_t ) 3U )
|
|
|
++#define queueQUEUE_TYPE_RECURSIVE_MUTEX ( ( uint8_t ) 4U )
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * QueueHandle_t xQueueCreate(
|
|
|
++ * UBaseType_t uxQueueLength,
|
|
|
++ * UBaseType_t uxItemSize
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new queue instance, and returns a handle by which the new queue
|
|
|
++ * can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, queues use two blocks of
|
|
|
++ * memory. The first block is used to hold the queue's data structures. The
|
|
|
++ * second block is used to hold items placed into the queue. If a queue is
|
|
|
++ * created using xQueueCreate() then both blocks of memory are automatically
|
|
|
++ * dynamically allocated inside the xQueueCreate() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a queue is created using
|
|
|
++ * xQueueCreateStatic() then the application writer must provide the memory that
|
|
|
++ * will get used by the queue. xQueueCreateStatic() therefore allows a queue to
|
|
|
++ * be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org/Embedded-RTOS-Queues.html
|
|
|
++ *
|
|
|
++ * @param uxQueueLength The maximum number of items that the queue can contain.
|
|
|
++ *
|
|
|
++ * @param uxItemSize The number of bytes each item in the queue will require.
|
|
|
++ * Items are queued by copy, not by reference, so this is the number of bytes
|
|
|
++ * that will be copied for each posted item. Each item on the queue must be
|
|
|
++ * the same size.
|
|
|
++ *
|
|
|
++ * @return If the queue is successfully create then a handle to the newly
|
|
|
++ * created queue is returned. If the queue cannot be created then 0 is
|
|
|
++ * returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * };
|
|
|
++ *
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * QueueHandle_t xQueue1, xQueue2;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 uint32_t values.
|
|
|
++ * xQueue1 = xQueueCreate( 10, sizeof( uint32_t ) );
|
|
|
++ * if( xQueue1 == 0 )
|
|
|
++ * {
|
|
|
++ * // Queue was not created and must not be used.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 pointers to AMessage structures.
|
|
|
++ * // These should be passed by pointer as they contain a lot of data.
|
|
|
++ * xQueue2 = xQueueCreate( 10, sizeof( struct AMessage * ) );
|
|
|
++ * if( xQueue2 == 0 )
|
|
|
++ * {
|
|
|
++ * // Queue was not created and must not be used.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueCreate xQueueCreate
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ #define xQueueCreate( uxQueueLength, uxItemSize ) xQueueGenericCreate( ( uxQueueLength ), ( uxItemSize ), ( queueQUEUE_TYPE_BASE ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * QueueHandle_t xQueueCreateStatic(
|
|
|
++ * UBaseType_t uxQueueLength,
|
|
|
++ * UBaseType_t uxItemSize,
|
|
|
++ * uint8_t *pucQueueStorage,
|
|
|
++ * StaticQueue_t *pxQueueBuffer
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new queue instance, and returns a handle by which the new queue
|
|
|
++ * can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, queues use two blocks of
|
|
|
++ * memory. The first block is used to hold the queue's data structures. The
|
|
|
++ * second block is used to hold items placed into the queue. If a queue is
|
|
|
++ * created using xQueueCreate() then both blocks of memory are automatically
|
|
|
++ * dynamically allocated inside the xQueueCreate() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a queue is created using
|
|
|
++ * xQueueCreateStatic() then the application writer must provide the memory that
|
|
|
++ * will get used by the queue. xQueueCreateStatic() therefore allows a queue to
|
|
|
++ * be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org/Embedded-RTOS-Queues.html
|
|
|
++ *
|
|
|
++ * @param uxQueueLength The maximum number of items that the queue can contain.
|
|
|
++ *
|
|
|
++ * @param uxItemSize The number of bytes each item in the queue will require.
|
|
|
++ * Items are queued by copy, not by reference, so this is the number of bytes
|
|
|
++ * that will be copied for each posted item. Each item on the queue must be
|
|
|
++ * the same size.
|
|
|
++ *
|
|
|
++ * @param pucQueueStorage If uxItemSize is not zero then
|
|
|
++ * pucQueueStorage must point to a uint8_t array that is at least large
|
|
|
++ * enough to hold the maximum number of items that can be in the queue at any
|
|
|
++ * one time - which is ( uxQueueLength * uxItemsSize ) bytes. If uxItemSize is
|
|
|
++ * zero then pucQueueStorage can be NULL.
|
|
|
++ *
|
|
|
++ * @param pxQueueBuffer Must point to a variable of type StaticQueue_t, which
|
|
|
++ * will be used to hold the queue's data structure.
|
|
|
++ *
|
|
|
++ * @return If the queue is created then a handle to the created queue is
|
|
|
++ * returned. If pxQueueBuffer is NULL then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * };
|
|
|
++ *
|
|
|
++ #define QUEUE_LENGTH 10
|
|
|
++ #define ITEM_SIZE sizeof( uint32_t )
|
|
|
++ *
|
|
|
++ * // xQueueBuffer will hold the queue structure.
|
|
|
++ * StaticQueue_t xQueueBuffer;
|
|
|
++ *
|
|
|
++ * // ucQueueStorage will hold the items posted to the queue. Must be at least
|
|
|
++ * // [(queue length) * ( queue item size)] bytes long.
|
|
|
++ * uint8_t ucQueueStorage[ QUEUE_LENGTH * ITEM_SIZE ];
|
|
|
++ *
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * QueueHandle_t xQueue1;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 uint32_t values.
|
|
|
++ * xQueue1 = xQueueCreate( QUEUE_LENGTH, // The number of items the queue can hold.
|
|
|
++ * ITEM_SIZE // The size of each item in the queue
|
|
|
++ * &( ucQueueStorage[ 0 ] ), // The buffer that will hold the items in the queue.
|
|
|
++ * &xQueueBuffer ); // The buffer that will hold the queue structure.
|
|
|
++ *
|
|
|
++ * // The queue is guaranteed to be created successfully as no dynamic memory
|
|
|
++ * // allocation is used. Therefore xQueue1 is now a handle to a valid queue.
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueCreateStatic xQueueCreateStatic
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ #define xQueueCreateStatic( uxQueueLength, uxItemSize, pucQueueStorage, pxQueueBuffer ) xQueueGenericCreateStatic( ( uxQueueLength ), ( uxItemSize ), ( pucQueueStorage ), ( pxQueueBuffer ), ( queueQUEUE_TYPE_BASE ) )
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueSendToToFront(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void *pvItemToQueue,
|
|
|
++ * TickType_t xTicksToWait
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Post an item to the front of a queue. The item is queued by copy, not by
|
|
|
++ * reference. This function must not be called from an interrupt service
|
|
|
++ * routine. See xQueueSendFromISR () for an alternative which may be used
|
|
|
++ * in an ISR.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time the task should block
|
|
|
++ * waiting for space to become available on the queue, should it already
|
|
|
++ * be full. The call will return immediately if this is set to 0 and the
|
|
|
++ * queue is full. The time is defined in tick periods so the constant
|
|
|
++ * portTICK_PERIOD_MS should be used to convert to real time if this is required.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the item was successfully posted, otherwise errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * } xMessage;
|
|
|
++ *
|
|
|
++ * uint32_t ulVar = 10UL;
|
|
|
++ *
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * QueueHandle_t xQueue1, xQueue2;
|
|
|
++ * struct AMessage *pxMessage;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 uint32_t values.
|
|
|
++ * xQueue1 = xQueueCreate( 10, sizeof( uint32_t ) );
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 pointers to AMessage structures.
|
|
|
++ * // These should be passed by pointer as they contain a lot of data.
|
|
|
++ * xQueue2 = xQueueCreate( 10, sizeof( struct AMessage * ) );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * if( xQueue1 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send an uint32_t. Wait for 10 ticks for space to become
|
|
|
++ * // available if necessary.
|
|
|
++ * if( xQueueSendToFront( xQueue1, ( void * ) &ulVar, ( TickType_t ) 10 ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // Failed to post the message, even after 10 ticks.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * if( xQueue2 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send a pointer to a struct AMessage object. Don't block if the
|
|
|
++ * // queue is already full.
|
|
|
++ * pxMessage = & xMessage;
|
|
|
++ * xQueueSendToFront( xQueue2, ( void * ) &pxMessage, ( TickType_t ) 0 );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueSend xQueueSend
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#define xQueueSendToFront( xQueue, pvItemToQueue, xTicksToWait ) \
|
|
|
++ xQueueGenericSend( ( xQueue ), ( pvItemToQueue ), ( xTicksToWait ), queueSEND_TO_FRONT )
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueSendToBack(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void *pvItemToQueue,
|
|
|
++ * TickType_t xTicksToWait
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * This is a macro that calls xQueueGenericSend().
|
|
|
++ *
|
|
|
++ * Post an item to the back of a queue. The item is queued by copy, not by
|
|
|
++ * reference. This function must not be called from an interrupt service
|
|
|
++ * routine. See xQueueSendFromISR () for an alternative which may be used
|
|
|
++ * in an ISR.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time the task should block
|
|
|
++ * waiting for space to become available on the queue, should it already
|
|
|
++ * be full. The call will return immediately if this is set to 0 and the queue
|
|
|
++ * is full. The time is defined in tick periods so the constant
|
|
|
++ * portTICK_PERIOD_MS should be used to convert to real time if this is required.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the item was successfully posted, otherwise errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * } xMessage;
|
|
|
++ *
|
|
|
++ * uint32_t ulVar = 10UL;
|
|
|
++ *
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * QueueHandle_t xQueue1, xQueue2;
|
|
|
++ * struct AMessage *pxMessage;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 uint32_t values.
|
|
|
++ * xQueue1 = xQueueCreate( 10, sizeof( uint32_t ) );
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 pointers to AMessage structures.
|
|
|
++ * // These should be passed by pointer as they contain a lot of data.
|
|
|
++ * xQueue2 = xQueueCreate( 10, sizeof( struct AMessage * ) );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * if( xQueue1 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send an uint32_t. Wait for 10 ticks for space to become
|
|
|
++ * // available if necessary.
|
|
|
++ * if( xQueueSendToBack( xQueue1, ( void * ) &ulVar, ( TickType_t ) 10 ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // Failed to post the message, even after 10 ticks.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * if( xQueue2 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send a pointer to a struct AMessage object. Don't block if the
|
|
|
++ * // queue is already full.
|
|
|
++ * pxMessage = & xMessage;
|
|
|
++ * xQueueSendToBack( xQueue2, ( void * ) &pxMessage, ( TickType_t ) 0 );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueSend xQueueSend
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#define xQueueSendToBack( xQueue, pvItemToQueue, xTicksToWait ) \
|
|
|
++ xQueueGenericSend( ( xQueue ), ( pvItemToQueue ), ( xTicksToWait ), queueSEND_TO_BACK )
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueSend(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void * pvItemToQueue,
|
|
|
++ * TickType_t xTicksToWait
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * This is a macro that calls xQueueGenericSend(). It is included for
|
|
|
++ * backward compatibility with versions of FreeRTOS.org that did not
|
|
|
++ * include the xQueueSendToFront() and xQueueSendToBack() macros. It is
|
|
|
++ * equivalent to xQueueSendToBack().
|
|
|
++ *
|
|
|
++ * Post an item on a queue. The item is queued by copy, not by reference.
|
|
|
++ * This function must not be called from an interrupt service routine.
|
|
|
++ * See xQueueSendFromISR () for an alternative which may be used in an ISR.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time the task should block
|
|
|
++ * waiting for space to become available on the queue, should it already
|
|
|
++ * be full. The call will return immediately if this is set to 0 and the
|
|
|
++ * queue is full. The time is defined in tick periods so the constant
|
|
|
++ * portTICK_PERIOD_MS should be used to convert to real time if this is required.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the item was successfully posted, otherwise errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * } xMessage;
|
|
|
++ *
|
|
|
++ * uint32_t ulVar = 10UL;
|
|
|
++ *
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * QueueHandle_t xQueue1, xQueue2;
|
|
|
++ * struct AMessage *pxMessage;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 uint32_t values.
|
|
|
++ * xQueue1 = xQueueCreate( 10, sizeof( uint32_t ) );
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 pointers to AMessage structures.
|
|
|
++ * // These should be passed by pointer as they contain a lot of data.
|
|
|
++ * xQueue2 = xQueueCreate( 10, sizeof( struct AMessage * ) );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * if( xQueue1 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send an uint32_t. Wait for 10 ticks for space to become
|
|
|
++ * // available if necessary.
|
|
|
++ * if( xQueueSend( xQueue1, ( void * ) &ulVar, ( TickType_t ) 10 ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // Failed to post the message, even after 10 ticks.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * if( xQueue2 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send a pointer to a struct AMessage object. Don't block if the
|
|
|
++ * // queue is already full.
|
|
|
++ * pxMessage = & xMessage;
|
|
|
++ * xQueueSend( xQueue2, ( void * ) &pxMessage, ( TickType_t ) 0 );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueSend xQueueSend
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#define xQueueSend( xQueue, pvItemToQueue, xTicksToWait ) \
|
|
|
++ xQueueGenericSend( ( xQueue ), ( pvItemToQueue ), ( xTicksToWait ), queueSEND_TO_BACK )
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueGenericSend(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void * pvItemToQueue,
|
|
|
++ * TickType_t xTicksToWait
|
|
|
++ * BaseType_t xCopyPosition
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * It is preferred that the macros xQueueSend(), xQueueSendToFront() and
|
|
|
++ * xQueueSendToBack() are used in place of calling this function directly.
|
|
|
++ *
|
|
|
++ * Post an item on a queue. The item is queued by copy, not by reference.
|
|
|
++ * This function must not be called from an interrupt service routine.
|
|
|
++ * See xQueueSendFromISR () for an alternative which may be used in an ISR.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time the task should block
|
|
|
++ * waiting for space to become available on the queue, should it already
|
|
|
++ * be full. The call will return immediately if this is set to 0 and the
|
|
|
++ * queue is full. The time is defined in tick periods so the constant
|
|
|
++ * portTICK_PERIOD_MS should be used to convert to real time if this is required.
|
|
|
++ *
|
|
|
++ * @param xCopyPosition Can take the value queueSEND_TO_BACK to place the
|
|
|
++ * item at the back of the queue, or queueSEND_TO_FRONT to place the item
|
|
|
++ * at the front of the queue (for high priority messages).
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the item was successfully posted, otherwise errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * } xMessage;
|
|
|
++ *
|
|
|
++ * uint32_t ulVar = 10UL;
|
|
|
++ *
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * QueueHandle_t xQueue1, xQueue2;
|
|
|
++ * struct AMessage *pxMessage;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 uint32_t values.
|
|
|
++ * xQueue1 = xQueueCreate( 10, sizeof( uint32_t ) );
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 pointers to AMessage structures.
|
|
|
++ * // These should be passed by pointer as they contain a lot of data.
|
|
|
++ * xQueue2 = xQueueCreate( 10, sizeof( struct AMessage * ) );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * if( xQueue1 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send an uint32_t. Wait for 10 ticks for space to become
|
|
|
++ * // available if necessary.
|
|
|
++ * if( xQueueGenericSend( xQueue1, ( void * ) &ulVar, ( TickType_t ) 10, queueSEND_TO_BACK ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // Failed to post the message, even after 10 ticks.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * if( xQueue2 != 0 )
|
|
|
++ * {
|
|
|
++ * // Send a pointer to a struct AMessage object. Don't block if the
|
|
|
++ * // queue is already full.
|
|
|
++ * pxMessage = & xMessage;
|
|
|
++ * xQueueGenericSend( xQueue2, ( void * ) &pxMessage, ( TickType_t ) 0, queueSEND_TO_BACK );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueSend xQueueSend
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++BaseType_t xQueueGenericSend( QueueHandle_t xQueue,
|
|
|
++ const void * const pvItemToQueue,
|
|
|
++ TickType_t xTicksToWait,
|
|
|
++ const BaseType_t xCopyPosition );
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueReceive(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * void *pvBuffer,
|
|
|
++ * TickType_t xTicksToWait
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Receive an item from a queue. The item is received by copy so a buffer of
|
|
|
++ * adequate size must be provided. The number of bytes copied into the buffer
|
|
|
++ * was defined when the queue was created.
|
|
|
++ *
|
|
|
++ * Successfully received items are removed from the queue.
|
|
|
++ *
|
|
|
++ * This function must not be used in an interrupt service routine. See
|
|
|
++ * xQueueReceiveFromISR for an alternative that can.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue from which the item is to be
|
|
|
++ * received.
|
|
|
++ *
|
|
|
++ * @param pvBuffer Pointer to the buffer into which the received item will
|
|
|
++ * be copied.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time the task should block
|
|
|
++ * waiting for an item to receive should the queue be empty at the time
|
|
|
++ * of the call. xQueueReceive() will return immediately if xTicksToWait
|
|
|
++ * is zero and the queue is empty. The time is defined in tick periods so the
|
|
|
++ * constant portTICK_PERIOD_MS should be used to convert to real time if this is
|
|
|
++ * required.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if an item was successfully received from the queue,
|
|
|
++ * otherwise pdFALSE.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * struct AMessage
|
|
|
++ * {
|
|
|
++ * char ucMessageID;
|
|
|
++ * char ucData[ 20 ];
|
|
|
++ * } xMessage;
|
|
|
++ *
|
|
|
++ * QueueHandle_t xQueue;
|
|
|
++ *
|
|
|
++ * // Task to create a queue and post a value.
|
|
|
++ * void vATask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * struct AMessage *pxMessage;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 pointers to AMessage structures.
|
|
|
++ * // These should be passed by pointer as they contain a lot of data.
|
|
|
++ * xQueue = xQueueCreate( 10, sizeof( struct AMessage * ) );
|
|
|
++ * if( xQueue == 0 )
|
|
|
++ * {
|
|
|
++ * // Failed to create the queue.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Send a pointer to a struct AMessage object. Don't block if the
|
|
|
++ * // queue is already full.
|
|
|
++ * pxMessage = & xMessage;
|
|
|
++ * xQueueSend( xQueue, ( void * ) &pxMessage, ( TickType_t ) 0 );
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Task to receive from the queue.
|
|
|
++ * void vADifferentTask( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * struct AMessage *pxRxedMessage;
|
|
|
++ *
|
|
|
++ * if( xQueue != 0 )
|
|
|
++ * {
|
|
|
++ * // Receive a message on the created queue. Block for 10 ticks if a
|
|
|
++ * // message is not immediately available.
|
|
|
++ * if( xQueueReceive( xQueue, &( pxRxedMessage ), ( TickType_t ) 10 ) )
|
|
|
++ * {
|
|
|
++ * // pcRxedMessage now points to the struct AMessage variable posted
|
|
|
++ * // by vATask.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ... Rest of task code.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueReceive xQueueReceive
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++BaseType_t xQueueReceive( QueueHandle_t xQueue,
|
|
|
++ void * const pvBuffer,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxQueueMessagesWaiting( const QueueHandle_t xQueue );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Return the number of messages stored in a queue.
|
|
|
++ *
|
|
|
++ * @param xQueue A handle to the queue being queried.
|
|
|
++ *
|
|
|
++ * @return The number of messages available in the queue.
|
|
|
++ *
|
|
|
++ * \defgroup uxQueueMessagesWaiting uxQueueMessagesWaiting
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++UBaseType_t uxQueueMessagesWaiting( const QueueHandle_t xQueue );
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxQueueSpacesAvailable( const QueueHandle_t xQueue );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Return the number of free spaces available in a queue. This is equal to the
|
|
|
++ * number of items that can be sent to the queue before the queue becomes full
|
|
|
++ * if no items are removed.
|
|
|
++ *
|
|
|
++ * @param xQueue A handle to the queue being queried.
|
|
|
++ *
|
|
|
++ * @return The number of spaces available in the queue.
|
|
|
++ *
|
|
|
++ * \defgroup uxQueueMessagesWaiting uxQueueMessagesWaiting
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++UBaseType_t uxQueueSpacesAvailable( const QueueHandle_t xQueue );
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * void vQueueDelete( QueueHandle_t xQueue );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Delete a queue - freeing all the memory allocated for storing of items
|
|
|
++ * placed on the queue.
|
|
|
++ *
|
|
|
++ * @param xQueue A handle to the queue to be deleted.
|
|
|
++ *
|
|
|
++ * \defgroup vQueueDelete vQueueDelete
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++void vQueueDelete( QueueHandle_t xQueue );
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueSendToFrontFromISR(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void *pvItemToQueue,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * This is a macro that calls xQueueGenericSendFromISR().
|
|
|
++ *
|
|
|
++ * Post an item to the front of a queue. It is safe to use this macro from
|
|
|
++ * within an interrupt service routine.
|
|
|
++ *
|
|
|
++ * Items are queued by copy not reference so it is preferable to only
|
|
|
++ * queue small items, especially when called from an ISR. In most cases
|
|
|
++ * it would be preferable to store a pointer to the item being queued.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xQueueSendToFrontFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if sending to the queue caused a task
|
|
|
++ * to unblock, and the unblocked task has a priority higher than the currently
|
|
|
++ * running task. If xQueueSendToFromFromISR() sets this value to pdTRUE then
|
|
|
++ * a context switch should be requested before the interrupt is exited.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the data was successfully sent to the queue, otherwise
|
|
|
++ * errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage for buffered IO (where the ISR can obtain more than one value
|
|
|
++ * per call):
|
|
|
++ * @code{c}
|
|
|
++ * void vBufferISR( void )
|
|
|
++ * {
|
|
|
++ * char cIn;
|
|
|
++ * BaseType_t xHigherPrioritTaskWoken;
|
|
|
++ *
|
|
|
++ * // We have not woken a task at the start of the ISR.
|
|
|
++ * xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Loop until the buffer is empty.
|
|
|
++ * do
|
|
|
++ * {
|
|
|
++ * // Obtain a byte from the buffer.
|
|
|
++ * cIn = portINPUT_BYTE( RX_REGISTER_ADDRESS );
|
|
|
++ *
|
|
|
++ * // Post the byte.
|
|
|
++ * xQueueSendToFrontFromISR( xRxQueue, &cIn, &xHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * } while( portINPUT_BYTE( BUFFER_COUNT ) );
|
|
|
++ *
|
|
|
++ * // Now the buffer is empty we can switch context if necessary.
|
|
|
++ * if( xHigherPriorityTaskWoken )
|
|
|
++ * {
|
|
|
++ * taskYIELD ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * \defgroup xQueueSendFromISR xQueueSendFromISR
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#define xQueueSendToFrontFromISR( xQueue, pvItemToQueue, pxHigherPriorityTaskWoken ) \
|
|
|
++ xQueueGenericSendFromISR( ( xQueue ), ( pvItemToQueue ), ( pxHigherPriorityTaskWoken ), queueSEND_TO_FRONT )
|
|
|
++
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueSendToBackFromISR(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void *pvItemToQueue,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * This is a macro that calls xQueueGenericSendFromISR().
|
|
|
++ *
|
|
|
++ * Post an item to the back of a queue. It is safe to use this macro from
|
|
|
++ * within an interrupt service routine.
|
|
|
++ *
|
|
|
++ * Items are queued by copy not reference so it is preferable to only
|
|
|
++ * queue small items, especially when called from an ISR. In most cases
|
|
|
++ * it would be preferable to store a pointer to the item being queued.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xQueueSendToBackFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if sending to the queue caused a task
|
|
|
++ * to unblock, and the unblocked task has a priority higher than the currently
|
|
|
++ * running task. If xQueueSendToBackFromISR() sets this value to pdTRUE then
|
|
|
++ * a context switch should be requested before the interrupt is exited.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the data was successfully sent to the queue, otherwise
|
|
|
++ * errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage for buffered IO (where the ISR can obtain more than one value
|
|
|
++ * per call):
|
|
|
++ * @code{c}
|
|
|
++ * void vBufferISR( void )
|
|
|
++ * {
|
|
|
++ * char cIn;
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken;
|
|
|
++ *
|
|
|
++ * // We have not woken a task at the start of the ISR.
|
|
|
++ * xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Loop until the buffer is empty.
|
|
|
++ * do
|
|
|
++ * {
|
|
|
++ * // Obtain a byte from the buffer.
|
|
|
++ * cIn = portINPUT_BYTE( RX_REGISTER_ADDRESS );
|
|
|
++ *
|
|
|
++ * // Post the byte.
|
|
|
++ * xQueueSendToBackFromISR( xRxQueue, &cIn, &xHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * } while( portINPUT_BYTE( BUFFER_COUNT ) );
|
|
|
++ *
|
|
|
++ * // Now the buffer is empty we can switch context if necessary.
|
|
|
++ * if( xHigherPriorityTaskWoken )
|
|
|
++ * {
|
|
|
++ * taskYIELD ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * \defgroup xQueueSendFromISR xQueueSendFromISR
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#define xQueueSendToBackFromISR( xQueue, pvItemToQueue, pxHigherPriorityTaskWoken ) \
|
|
|
++ xQueueGenericSendFromISR( ( xQueue ), ( pvItemToQueue ), ( pxHigherPriorityTaskWoken ), queueSEND_TO_BACK )
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueSendFromISR(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void *pvItemToQueue,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * This is a macro that calls xQueueGenericSendFromISR(). It is included
|
|
|
++ * for backward compatibility with versions of FreeRTOS.org that did not
|
|
|
++ * include the xQueueSendToBackFromISR() and xQueueSendToFrontFromISR()
|
|
|
++ * macros.
|
|
|
++ *
|
|
|
++ * Post an item to the back of a queue. It is safe to use this function from
|
|
|
++ * within an interrupt service routine.
|
|
|
++ *
|
|
|
++ * Items are queued by copy not reference so it is preferable to only
|
|
|
++ * queue small items, especially when called from an ISR. In most cases
|
|
|
++ * it would be preferable to store a pointer to the item being queued.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xQueueSendFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if sending to the queue caused a task
|
|
|
++ * to unblock, and the unblocked task has a priority higher than the currently
|
|
|
++ * running task. If xQueueSendFromISR() sets this value to pdTRUE then
|
|
|
++ * a context switch should be requested before the interrupt is exited.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the data was successfully sent to the queue, otherwise
|
|
|
++ * errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage for buffered IO (where the ISR can obtain more than one value
|
|
|
++ * per call):
|
|
|
++ * @code{c}
|
|
|
++ * void vBufferISR( void )
|
|
|
++ * {
|
|
|
++ * char cIn;
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken;
|
|
|
++ *
|
|
|
++ * // We have not woken a task at the start of the ISR.
|
|
|
++ * xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Loop until the buffer is empty.
|
|
|
++ * do
|
|
|
++ * {
|
|
|
++ * // Obtain a byte from the buffer.
|
|
|
++ * cIn = portINPUT_BYTE( RX_REGISTER_ADDRESS );
|
|
|
++ *
|
|
|
++ * // Post the byte.
|
|
|
++ * xQueueSendFromISR( xRxQueue, &cIn, &xHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * } while( portINPUT_BYTE( BUFFER_COUNT ) );
|
|
|
++ *
|
|
|
++ * // Now the buffer is empty we can switch context if necessary.
|
|
|
++ * if( xHigherPriorityTaskWoken )
|
|
|
++ * {
|
|
|
++ * // Actual macro used here is port specific.
|
|
|
++ * portYIELD_FROM_ISR ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * \defgroup xQueueSendFromISR xQueueSendFromISR
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++#define xQueueSendFromISR( xQueue, pvItemToQueue, pxHigherPriorityTaskWoken ) \
|
|
|
++ xQueueGenericSendFromISR( ( xQueue ), ( pvItemToQueue ), ( pxHigherPriorityTaskWoken ), queueSEND_TO_BACK )
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueGenericSendFromISR(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * const void *pvItemToQueue,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken,
|
|
|
++ * BaseType_t xCopyPosition
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * It is preferred that the macros xQueueSendFromISR(),
|
|
|
++ * xQueueSendToFrontFromISR() and xQueueSendToBackFromISR() be used in place
|
|
|
++ * of calling this function directly. xQueueGiveFromISR() is an
|
|
|
++ * equivalent for use by semaphores that don't actually copy any data.
|
|
|
++ *
|
|
|
++ * Post an item on a queue. It is safe to use this function from within an
|
|
|
++ * interrupt service routine.
|
|
|
++ *
|
|
|
++ * Items are queued by copy not reference so it is preferable to only
|
|
|
++ * queue small items, especially when called from an ISR. In most cases
|
|
|
++ * it would be preferable to store a pointer to the item being queued.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue on which the item is to be posted.
|
|
|
++ *
|
|
|
++ * @param pvItemToQueue A pointer to the item that is to be placed on the
|
|
|
++ * queue. The size of the items the queue will hold was defined when the
|
|
|
++ * queue was created, so this many bytes will be copied from pvItemToQueue
|
|
|
++ * into the queue storage area.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xQueueGenericSendFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if sending to the queue caused a task
|
|
|
++ * to unblock, and the unblocked task has a priority higher than the currently
|
|
|
++ * running task. If xQueueGenericSendFromISR() sets this value to pdTRUE then
|
|
|
++ * a context switch should be requested before the interrupt is exited.
|
|
|
++ *
|
|
|
++ * @param xCopyPosition Can take the value queueSEND_TO_BACK to place the
|
|
|
++ * item at the back of the queue, or queueSEND_TO_FRONT to place the item
|
|
|
++ * at the front of the queue (for high priority messages).
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the data was successfully sent to the queue, otherwise
|
|
|
++ * errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage for buffered IO (where the ISR can obtain more than one value
|
|
|
++ * per call):
|
|
|
++ * @code{c}
|
|
|
++ * void vBufferISR( void )
|
|
|
++ * {
|
|
|
++ * char cIn;
|
|
|
++ * BaseType_t xHigherPriorityTaskWokenByPost;
|
|
|
++ *
|
|
|
++ * // We have not woken a task at the start of the ISR.
|
|
|
++ * xHigherPriorityTaskWokenByPost = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Loop until the buffer is empty.
|
|
|
++ * do
|
|
|
++ * {
|
|
|
++ * // Obtain a byte from the buffer.
|
|
|
++ * cIn = portINPUT_BYTE( RX_REGISTER_ADDRESS );
|
|
|
++ *
|
|
|
++ * // Post each byte.
|
|
|
++ * xQueueGenericSendFromISR( xRxQueue, &cIn, &xHigherPriorityTaskWokenByPost, queueSEND_TO_BACK );
|
|
|
++ *
|
|
|
++ * } while( portINPUT_BYTE( BUFFER_COUNT ) );
|
|
|
++ *
|
|
|
++ * // Now the buffer is empty we can switch context if necessary. Note that the
|
|
|
++ * // name of the yield function required is port specific.
|
|
|
++ * if( xHigherPriorityTaskWokenByPost )
|
|
|
++ * {
|
|
|
++ * portYIELD_FROM_ISR();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * \defgroup xQueueSendFromISR xQueueSendFromISR
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++BaseType_t xQueueGenericSendFromISR( QueueHandle_t xQueue,
|
|
|
++ const void * const pvItemToQueue,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken,
|
|
|
++ const BaseType_t xCopyPosition );
|
|
|
++BaseType_t xQueueGiveFromISR( QueueHandle_t xQueue,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken );
|
|
|
++
|
|
|
++/**
|
|
|
++ * queue. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xQueueReceiveFromISR(
|
|
|
++ * QueueHandle_t xQueue,
|
|
|
++ * void *pvBuffer,
|
|
|
++ * BaseType_t *pxTaskWoken
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Receive an item from a queue. It is safe to use this function from within an
|
|
|
++ * interrupt service routine.
|
|
|
++ *
|
|
|
++ * @param xQueue The handle to the queue from which the item is to be
|
|
|
++ * received.
|
|
|
++ *
|
|
|
++ * @param pvBuffer Pointer to the buffer into which the received item will
|
|
|
++ * be copied.
|
|
|
++ *
|
|
|
++ * @param pxTaskWoken A task may be blocked waiting for space to become
|
|
|
++ * available on the queue. If xQueueReceiveFromISR causes such a task to
|
|
|
++ * unblock *pxTaskWoken will get set to pdTRUE, otherwise *pxTaskWoken will
|
|
|
++ * remain unchanged.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if an item was successfully received from the queue,
|
|
|
++ * otherwise pdFALSE.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ *
|
|
|
++ * QueueHandle_t xQueue;
|
|
|
++ *
|
|
|
++ * // Function to create a queue and post some values.
|
|
|
++ * void vAFunction( void *pvParameters )
|
|
|
++ * {
|
|
|
++ * char cValueToPost;
|
|
|
++ * const TickType_t xTicksToWait = ( TickType_t )0xff;
|
|
|
++ *
|
|
|
++ * // Create a queue capable of containing 10 characters.
|
|
|
++ * xQueue = xQueueCreate( 10, sizeof( char ) );
|
|
|
++ * if( xQueue == 0 )
|
|
|
++ * {
|
|
|
++ * // Failed to create the queue.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Post some characters that will be used within an ISR. If the queue
|
|
|
++ * // is full then this task will block for xTicksToWait ticks.
|
|
|
++ * cValueToPost = 'a';
|
|
|
++ * xQueueSend( xQueue, ( void * ) &cValueToPost, xTicksToWait );
|
|
|
++ * cValueToPost = 'b';
|
|
|
++ * xQueueSend( xQueue, ( void * ) &cValueToPost, xTicksToWait );
|
|
|
++ *
|
|
|
++ * // ... keep posting characters ... this task may block when the queue
|
|
|
++ * // becomes full.
|
|
|
++ *
|
|
|
++ * cValueToPost = 'c';
|
|
|
++ * xQueueSend( xQueue, ( void * ) &cValueToPost, xTicksToWait );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ISR that outputs all the characters received on the queue.
|
|
|
++ * void vISR_Routine( void )
|
|
|
++ * {
|
|
|
++ * BaseType_t xTaskWokenByReceive = pdFALSE;
|
|
|
++ * char cRxedChar;
|
|
|
++ *
|
|
|
++ * while( xQueueReceiveFromISR( xQueue, ( void * ) &cRxedChar, &xTaskWokenByReceive) )
|
|
|
++ * {
|
|
|
++ * // A character was received. Output the character now.
|
|
|
++ * vOutputCharacter( cRxedChar );
|
|
|
++ *
|
|
|
++ * // If removing the character from the queue woke the task that was
|
|
|
++ * // posting onto the queue cTaskWokenByReceive will have been set to
|
|
|
++ * // pdTRUE. No matter how many times this loop iterates only one
|
|
|
++ * // task will be woken.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * if( cTaskWokenByPost != ( char ) pdFALSE;
|
|
|
++ * {
|
|
|
++ * taskYIELD ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xQueueReceiveFromISR xQueueReceiveFromISR
|
|
|
++ * \ingroup QueueManagement
|
|
|
++ */
|
|
|
++BaseType_t xQueueReceiveFromISR( QueueHandle_t xQueue,
|
|
|
++ void * const pvBuffer,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Utilities to query queues that are safe to use from an ISR. These utilities
|
|
|
++ * should be used only from witin an ISR, or within a critical section.
|
|
|
++ */
|
|
|
++BaseType_t xQueueIsQueueEmptyFromISR( const QueueHandle_t xQueue );
|
|
|
++BaseType_t xQueueIsQueueFullFromISR( const QueueHandle_t xQueue );
|
|
|
++UBaseType_t uxQueueMessagesWaitingFromISR( const QueueHandle_t xQueue );
|
|
|
++
|
|
|
++/*
|
|
|
++ * For internal use only. Use xSemaphoreCreateMutex(),
|
|
|
++ * xSemaphoreCreateCounting() or xSemaphoreGetMutexHolder() instead of calling
|
|
|
++ * these functions directly.
|
|
|
++ */
|
|
|
++QueueHandle_t xQueueCreateMutex( const uint8_t ucQueueType );
|
|
|
++QueueHandle_t xQueueCreateMutexStatic( const uint8_t ucQueueType,
|
|
|
++ StaticQueue_t * pxStaticQueue );
|
|
|
++QueueHandle_t xQueueCreateCountingSemaphore( const UBaseType_t uxMaxCount,
|
|
|
++ const UBaseType_t uxInitialCount );
|
|
|
++QueueHandle_t xQueueCreateCountingSemaphoreStatic( const UBaseType_t uxMaxCount,
|
|
|
++ const UBaseType_t uxInitialCount,
|
|
|
++ StaticQueue_t * pxStaticQueue );
|
|
|
++BaseType_t xQueueSemaphoreTake( QueueHandle_t xQueue,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++TaskHandle_t xQueueGetMutexHolder( QueueHandle_t xSemaphore );
|
|
|
++TaskHandle_t xQueueGetMutexHolderFromISR( QueueHandle_t xSemaphore );
|
|
|
++
|
|
|
++/*
|
|
|
++ * For internal use only. Use xSemaphoreTakeMutexRecursive() or
|
|
|
++ * xSemaphoreGiveMutexRecursive() instead of calling these functions directly.
|
|
|
++ */
|
|
|
++BaseType_t xQueueTakeMutexRecursive( QueueHandle_t xMutex,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++BaseType_t xQueueGiveMutexRecursive( QueueHandle_t xMutex );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Reset a queue back to its original empty state. The return value is now
|
|
|
++ * obsolete and is always set to pdPASS.
|
|
|
++ */
|
|
|
++#define xQueueReset( xQueue ) xQueueGenericReset( xQueue, pdFALSE )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Generic version of the function used to create a queue using dynamic memory
|
|
|
++ * allocation. This is called by other functions and macros that create other
|
|
|
++ * RTOS objects that use the queue structure as their base.
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ QueueHandle_t xQueueGenericCreate( const UBaseType_t uxQueueLength,
|
|
|
++ const UBaseType_t uxItemSize,
|
|
|
++ const uint8_t ucQueueType );
|
|
|
++#endif
|
|
|
++
|
|
|
++/*
|
|
|
++ * Generic version of the function used to create a queue using dynamic memory
|
|
|
++ * allocation. This is called by other functions and macros that create other
|
|
|
++ * RTOS objects that use the queue structure as their base.
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ QueueHandle_t xQueueGenericCreateStatic( const UBaseType_t uxQueueLength,
|
|
|
++ const UBaseType_t uxItemSize,
|
|
|
++ uint8_t * pucQueueStorage,
|
|
|
++ StaticQueue_t * pxStaticQueue,
|
|
|
++ const uint8_t ucQueueType );
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Not public API functions. */
|
|
|
++BaseType_t xQueueGenericReset( QueueHandle_t xQueue,
|
|
|
++ BaseType_t xNewQueue );
|
|
|
++
|
|
|
++/* Unimplemented */
|
|
|
++typedef struct QueueDefinition * QueueSetHandle_t;
|
|
|
++typedef struct QueueDefinition * QueueSetMemberHandle_t;
|
|
|
++QueueSetHandle_t xQueueCreateSet( const UBaseType_t uxEventQueueLength );
|
|
|
++BaseType_t xQueueAddToSet( QueueSetMemberHandle_t xQueueOrSemaphore,
|
|
|
++ QueueSetHandle_t xQueueSet );
|
|
|
++BaseType_t xQueueRemoveFromSet( QueueSetMemberHandle_t xQueueOrSemaphore,
|
|
|
++ QueueSetHandle_t xQueueSet );
|
|
|
++QueueSetMemberHandle_t xQueueSelectFromSet( QueueSetHandle_t xQueueSet,
|
|
|
++ const TickType_t xTicksToWait );
|
|
|
++QueueSetMemberHandle_t xQueueSelectFromSetFromISR( QueueSetHandle_t xQueueSet );
|
|
|
++BaseType_t xQueuePeek( QueueHandle_t xQueue,
|
|
|
++ void * const pvBuffer,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++BaseType_t xQueueOverwrite(QueueHandle_t xQueue, const void * pvItemToQueue);
|
|
|
++BaseType_t xQueueOverwriteFromISR(QueueHandle_t xQueue, const void * pvItemToQueue, BaseType_t *pxHigherPriorityTaskWoken);
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++#endif /* QUEUE_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/semphr.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/semphr.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..053dd177cf
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/semphr.h
|
|
|
+@@ -0,0 +1,1188 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef SEMAPHORE_H
|
|
|
++#define SEMAPHORE_H
|
|
|
++
|
|
|
++#ifndef INC_FREERTOS_H
|
|
|
++ #error "include FreeRTOS.h" must appear in source files before "include semphr.h"
|
|
|
++#endif
|
|
|
++
|
|
|
++#include "queue.h"
|
|
|
++
|
|
|
++typedef QueueHandle_t SemaphoreHandle_t;
|
|
|
++
|
|
|
++#define semBINARY_SEMAPHORE_QUEUE_LENGTH ( ( uint8_t ) 1U )
|
|
|
++#define semSEMAPHORE_QUEUE_ITEM_LENGTH ( ( uint8_t ) 0U )
|
|
|
++#define semGIVE_BLOCK_TIME ( ( TickType_t ) 0U )
|
|
|
++
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * vSemaphoreCreateBinary( SemaphoreHandle_t xSemaphore );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * In many usage scenarios it is faster and more memory efficient to use a
|
|
|
++ * direct to task notification in place of a binary semaphore!
|
|
|
++ * https://www.FreeRTOS.org/RTOS-task-notifications.html
|
|
|
++ *
|
|
|
++ * This old vSemaphoreCreateBinary() macro is now deprecated in favour of the
|
|
|
++ * xSemaphoreCreateBinary() function. Note that binary semaphores created using
|
|
|
++ * the vSemaphoreCreateBinary() macro are created in a state such that the
|
|
|
++ * first call to 'take' the semaphore would pass, whereas binary semaphores
|
|
|
++ * created using xSemaphoreCreateBinary() are created in a state such that the
|
|
|
++ * the semaphore must first be 'given' before it can be 'taken'.
|
|
|
++ *
|
|
|
++ * <i>Macro</i> that implements a semaphore by using the existing queue mechanism.
|
|
|
++ * The queue length is 1 as this is a binary semaphore. The data size is 0
|
|
|
++ * as we don't want to actually store any data - we just want to know if the
|
|
|
++ * queue is empty or full.
|
|
|
++ *
|
|
|
++ * This type of semaphore can be used for pure synchronisation between tasks or
|
|
|
++ * between an interrupt and a task. The semaphore need not be given back once
|
|
|
++ * obtained, so one task/interrupt can continuously 'give' the semaphore while
|
|
|
++ * another continuously 'takes' the semaphore. For this reason this type of
|
|
|
++ * semaphore does not use a priority inheritance mechanism. For an alternative
|
|
|
++ * that does use priority inheritance see xSemaphoreCreateMutex().
|
|
|
++ *
|
|
|
++ * @param xSemaphore Handle to the created semaphore. Should be of type SemaphoreHandle_t.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Semaphore cannot be used before a call to vSemaphoreCreateBinary ().
|
|
|
++ * // This is a macro so pass the variable in directly.
|
|
|
++ * vSemaphoreCreateBinary( xSemaphore );
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * // The semaphore was created successfully.
|
|
|
++ * // The semaphore can now be used.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup vSemaphoreCreateBinary vSemaphoreCreateBinary
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ #define vSemaphoreCreateBinary( xSemaphore ) \
|
|
|
++ { \
|
|
|
++ ( xSemaphore ) = xQueueGenericCreate( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE ); \
|
|
|
++ if( ( xSemaphore ) != NULL ) \
|
|
|
++ { \
|
|
|
++ ( void ) xSemaphoreGive( ( xSemaphore ) ); \
|
|
|
++ } \
|
|
|
++ }
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateBinary( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new binary semaphore instance, and returns a handle by which the
|
|
|
++ * new semaphore can be referenced.
|
|
|
++ *
|
|
|
++ * In many usage scenarios it is faster and more memory efficient to use a
|
|
|
++ * direct to task notification in place of a binary semaphore!
|
|
|
++ * https://www.FreeRTOS.org/RTOS-task-notifications.html
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, binary semaphores use a block
|
|
|
++ * of memory, in which the semaphore structure is stored. If a binary semaphore
|
|
|
++ * is created using xSemaphoreCreateBinary() then the required memory is
|
|
|
++ * automatically dynamically allocated inside the xSemaphoreCreateBinary()
|
|
|
++ * function. (see https://www.FreeRTOS.org/a00111.html). If a binary semaphore
|
|
|
++ * is created using xSemaphoreCreateBinaryStatic() then the application writer
|
|
|
++ * must provide the memory. xSemaphoreCreateBinaryStatic() therefore allows a
|
|
|
++ * binary semaphore to be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * The old vSemaphoreCreateBinary() macro is now deprecated in favour of this
|
|
|
++ * xSemaphoreCreateBinary() function. Note that binary semaphores created using
|
|
|
++ * the vSemaphoreCreateBinary() macro are created in a state such that the
|
|
|
++ * first call to 'take' the semaphore would pass, whereas binary semaphores
|
|
|
++ * created using xSemaphoreCreateBinary() are created in a state such that the
|
|
|
++ * the semaphore must first be 'given' before it can be 'taken'.
|
|
|
++ *
|
|
|
++ * This type of semaphore can be used for pure synchronisation between tasks or
|
|
|
++ * between an interrupt and a task. The semaphore need not be given back once
|
|
|
++ * obtained, so one task/interrupt can continuously 'give' the semaphore while
|
|
|
++ * another continuously 'takes' the semaphore. For this reason this type of
|
|
|
++ * semaphore does not use a priority inheritance mechanism. For an alternative
|
|
|
++ * that does use priority inheritance see xSemaphoreCreateMutex().
|
|
|
++ *
|
|
|
++ * @return Handle to the created semaphore, or NULL if the memory required to
|
|
|
++ * hold the semaphore's data structures could not be allocated.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Semaphore cannot be used before a call to xSemaphoreCreateBinary().
|
|
|
++ * // This is a macro so pass the variable in directly.
|
|
|
++ * xSemaphore = xSemaphoreCreateBinary();
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * // The semaphore was created successfully.
|
|
|
++ * // The semaphore can now be used.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateBinary xSemaphoreCreateBinary
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ #define xSemaphoreCreateBinary() xQueueGenericCreate( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateBinaryStatic( StaticSemaphore_t *pxSemaphoreBuffer );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new binary semaphore instance, and returns a handle by which the
|
|
|
++ * new semaphore can be referenced.
|
|
|
++ *
|
|
|
++ * NOTE: In many usage scenarios it is faster and more memory efficient to use a
|
|
|
++ * direct to task notification in place of a binary semaphore!
|
|
|
++ * https://www.FreeRTOS.org/RTOS-task-notifications.html
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, binary semaphores use a block
|
|
|
++ * of memory, in which the semaphore structure is stored. If a binary semaphore
|
|
|
++ * is created using xSemaphoreCreateBinary() then the required memory is
|
|
|
++ * automatically dynamically allocated inside the xSemaphoreCreateBinary()
|
|
|
++ * function. (see https://www.FreeRTOS.org/a00111.html). If a binary semaphore
|
|
|
++ * is created using xSemaphoreCreateBinaryStatic() then the application writer
|
|
|
++ * must provide the memory. xSemaphoreCreateBinaryStatic() therefore allows a
|
|
|
++ * binary semaphore to be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * This type of semaphore can be used for pure synchronisation between tasks or
|
|
|
++ * between an interrupt and a task. The semaphore need not be given back once
|
|
|
++ * obtained, so one task/interrupt can continuously 'give' the semaphore while
|
|
|
++ * another continuously 'takes' the semaphore. For this reason this type of
|
|
|
++ * semaphore does not use a priority inheritance mechanism. For an alternative
|
|
|
++ * that does use priority inheritance see xSemaphoreCreateMutex().
|
|
|
++ *
|
|
|
++ * @param pxSemaphoreBuffer Must point to a variable of type StaticSemaphore_t,
|
|
|
++ * which will then be used to hold the semaphore's data structure, removing the
|
|
|
++ * need for the memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If the semaphore is created then a handle to the created semaphore is
|
|
|
++ * returned. If pxSemaphoreBuffer is NULL then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ * StaticSemaphore_t xSemaphoreBuffer;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Semaphore cannot be used before a call to xSemaphoreCreateBinary().
|
|
|
++ * // The semaphore's data structures will be placed in the xSemaphoreBuffer
|
|
|
++ * // variable, the address of which is passed into the function. The
|
|
|
++ * // function's parameter is not NULL, so the function will not attempt any
|
|
|
++ * // dynamic memory allocation, and therefore the function will not return
|
|
|
++ * // return NULL.
|
|
|
++ * xSemaphore = xSemaphoreCreateBinary( &xSemaphoreBuffer );
|
|
|
++ *
|
|
|
++ * // Rest of task code goes here.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateBinaryStatic xSemaphoreCreateBinaryStatic
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ #define xSemaphoreCreateBinaryStatic( pxStaticSemaphore ) xQueueGenericCreateStatic( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, NULL, ( StaticQueue_t * ) pxStaticSemaphore, queueQUEUE_TYPE_BINARY_SEMAPHORE )
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * xSemaphoreTake(
|
|
|
++ * SemaphoreHandle_t xSemaphore,
|
|
|
++ * TickType_t xBlockTime
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * <i>Macro</i> to obtain a semaphore. The semaphore must have previously been
|
|
|
++ * created with a call to xSemaphoreCreateBinary(), xSemaphoreCreateMutex() or
|
|
|
++ * xSemaphoreCreateCounting().
|
|
|
++ *
|
|
|
++ * @param xSemaphore A handle to the semaphore being taken - obtained when
|
|
|
++ * the semaphore was created.
|
|
|
++ *
|
|
|
++ * @param xBlockTime The time in ticks to wait for the semaphore to become
|
|
|
++ * available. The macro portTICK_PERIOD_MS can be used to convert this to a
|
|
|
++ * real time. A block time of zero can be used to poll the semaphore. A block
|
|
|
++ * time of portMAX_DELAY can be used to block indefinitely (provided
|
|
|
++ * INCLUDE_vTaskSuspend is set to 1 in FreeRTOSConfig.h).
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the semaphore was obtained. pdFALSE
|
|
|
++ * if xBlockTime expired without the semaphore becoming available.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * // A task that creates a semaphore.
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Create the semaphore to guard a shared resource.
|
|
|
++ * xSemaphore = xSemaphoreCreateBinary();
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // A task that uses the semaphore.
|
|
|
++ * void vAnotherTask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // ... Do other things.
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * // See if we can obtain the semaphore. If the semaphore is not available
|
|
|
++ * // wait 10 ticks to see if it becomes free.
|
|
|
++ * if( xSemaphoreTake( xSemaphore, ( TickType_t ) 10 ) == pdTRUE )
|
|
|
++ * {
|
|
|
++ * // We were able to obtain the semaphore and can now access the
|
|
|
++ * // shared resource.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // We have finished accessing the shared resource. Release the
|
|
|
++ * // semaphore.
|
|
|
++ * xSemaphoreGive( xSemaphore );
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // We could not obtain the semaphore and can therefore not access
|
|
|
++ * // the shared resource safely.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreTake xSemaphoreTake
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#define xSemaphoreTake( xSemaphore, xBlockTime ) xQueueSemaphoreTake( ( xSemaphore ), ( xBlockTime ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * xSemaphoreTakeRecursive(
|
|
|
++ * SemaphoreHandle_t xMutex,
|
|
|
++ * TickType_t xBlockTime
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * <i>Macro</i> to recursively obtain, or 'take', a mutex type semaphore.
|
|
|
++ * The mutex must have previously been created using a call to
|
|
|
++ * xSemaphoreCreateRecursiveMutex();
|
|
|
++ *
|
|
|
++ * configUSE_RECURSIVE_MUTEXES must be set to 1 in FreeRTOSConfig.h for this
|
|
|
++ * macro to be available.
|
|
|
++ *
|
|
|
++ * This macro must not be used on mutexes created using xSemaphoreCreateMutex().
|
|
|
++ *
|
|
|
++ * A mutex used recursively can be 'taken' repeatedly by the owner. The mutex
|
|
|
++ * doesn't become available again until the owner has called
|
|
|
++ * xSemaphoreGiveRecursive() for each successful 'take' request. For example,
|
|
|
++ * if a task successfully 'takes' the same mutex 5 times then the mutex will
|
|
|
++ * not be available to any other task until it has also 'given' the mutex back
|
|
|
++ * exactly five times.
|
|
|
++ *
|
|
|
++ * @param xMutex A handle to the mutex being obtained. This is the
|
|
|
++ * handle returned by xSemaphoreCreateRecursiveMutex();
|
|
|
++ *
|
|
|
++ * @param xBlockTime The time in ticks to wait for the semaphore to become
|
|
|
++ * available. The macro portTICK_PERIOD_MS can be used to convert this to a
|
|
|
++ * real time. A block time of zero can be used to poll the semaphore. If
|
|
|
++ * the task already owns the semaphore then xSemaphoreTakeRecursive() will
|
|
|
++ * return immediately no matter what the value of xBlockTime.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the semaphore was obtained. pdFALSE if xBlockTime
|
|
|
++ * expired without the semaphore becoming available.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xMutex = NULL;
|
|
|
++ *
|
|
|
++ * // A task that creates a mutex.
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Create the mutex to guard a shared resource.
|
|
|
++ * xMutex = xSemaphoreCreateRecursiveMutex();
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // A task that uses the mutex.
|
|
|
++ * void vAnotherTask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // ... Do other things.
|
|
|
++ *
|
|
|
++ * if( xMutex != NULL )
|
|
|
++ * {
|
|
|
++ * // See if we can obtain the mutex. If the mutex is not available
|
|
|
++ * // wait 10 ticks to see if it becomes free.
|
|
|
++ * if( xSemaphoreTakeRecursive( xSemaphore, ( TickType_t ) 10 ) == pdTRUE )
|
|
|
++ * {
|
|
|
++ * // We were able to obtain the mutex and can now access the
|
|
|
++ * // shared resource.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ * // For some reason due to the nature of the code further calls to
|
|
|
++ * // xSemaphoreTakeRecursive() are made on the same mutex. In real
|
|
|
++ * // code these would not be just sequential calls as this would make
|
|
|
++ * // no sense. Instead the calls are likely to be buried inside
|
|
|
++ * // a more complex call structure.
|
|
|
++ * xSemaphoreTakeRecursive( xMutex, ( TickType_t ) 10 );
|
|
|
++ * xSemaphoreTakeRecursive( xMutex, ( TickType_t ) 10 );
|
|
|
++ *
|
|
|
++ * // The mutex has now been 'taken' three times, so will not be
|
|
|
++ * // available to another task until it has also been given back
|
|
|
++ * // three times. Again it is unlikely that real code would have
|
|
|
++ * // these calls sequentially, but instead buried in a more complex
|
|
|
++ * // call structure. This is just for illustrative purposes.
|
|
|
++ * xSemaphoreGiveRecursive( xMutex );
|
|
|
++ * xSemaphoreGiveRecursive( xMutex );
|
|
|
++ * xSemaphoreGiveRecursive( xMutex );
|
|
|
++ *
|
|
|
++ * // Now the mutex can be taken by other tasks.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // We could not obtain the mutex and can therefore not access
|
|
|
++ * // the shared resource safely.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreTakeRecursive xSemaphoreTakeRecursive
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configUSE_RECURSIVE_MUTEXES == 1 )
|
|
|
++ #define xSemaphoreTakeRecursive( xMutex, xBlockTime ) xQueueTakeMutexRecursive( ( xMutex ), ( xBlockTime ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * xSemaphoreGive( SemaphoreHandle_t xSemaphore );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * <i>Macro</i> to release a semaphore. The semaphore must have previously been
|
|
|
++ * created with a call to xSemaphoreCreateBinary(), xSemaphoreCreateMutex() or
|
|
|
++ * xSemaphoreCreateCounting(). and obtained using sSemaphoreTake().
|
|
|
++ *
|
|
|
++ * This macro must not be used from an ISR. See xSemaphoreGiveFromISR () for
|
|
|
++ * an alternative which can be used from an ISR.
|
|
|
++ *
|
|
|
++ * This macro must also not be used on semaphores created using
|
|
|
++ * xSemaphoreCreateRecursiveMutex().
|
|
|
++ *
|
|
|
++ * @param xSemaphore A handle to the semaphore being released. This is the
|
|
|
++ * handle returned when the semaphore was created.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the semaphore was released. pdFALSE if an error occurred.
|
|
|
++ * Semaphores are implemented using queues. An error can occur if there is
|
|
|
++ * no space on the queue to post a message - indicating that the
|
|
|
++ * semaphore was not first obtained correctly.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Create the semaphore to guard a shared resource.
|
|
|
++ * xSemaphore = vSemaphoreCreateBinary();
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * if( xSemaphoreGive( xSemaphore ) != pdTRUE )
|
|
|
++ * {
|
|
|
++ * // We would expect this call to fail because we cannot give
|
|
|
++ * // a semaphore without first "taking" it!
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Obtain the semaphore - don't block if the semaphore is not
|
|
|
++ * // immediately available.
|
|
|
++ * if( xSemaphoreTake( xSemaphore, ( TickType_t ) 0 ) )
|
|
|
++ * {
|
|
|
++ * // We now have the semaphore and can access the shared resource.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // We have finished accessing the shared resource so can free the
|
|
|
++ * // semaphore.
|
|
|
++ * if( xSemaphoreGive( xSemaphore ) != pdTRUE )
|
|
|
++ * {
|
|
|
++ * // We would not expect this call to fail because we must have
|
|
|
++ * // obtained the semaphore to get here.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreGive xSemaphoreGive
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#define xSemaphoreGive( xSemaphore ) xQueueGenericSend( ( QueueHandle_t ) ( xSemaphore ), NULL, semGIVE_BLOCK_TIME, queueSEND_TO_BACK )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * xSemaphoreGiveRecursive( SemaphoreHandle_t xMutex );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * <i>Macro</i> to recursively release, or 'give', a mutex type semaphore.
|
|
|
++ * The mutex must have previously been created using a call to
|
|
|
++ * xSemaphoreCreateRecursiveMutex();
|
|
|
++ *
|
|
|
++ * configUSE_RECURSIVE_MUTEXES must be set to 1 in FreeRTOSConfig.h for this
|
|
|
++ * macro to be available.
|
|
|
++ *
|
|
|
++ * This macro must not be used on mutexes created using xSemaphoreCreateMutex().
|
|
|
++ *
|
|
|
++ * A mutex used recursively can be 'taken' repeatedly by the owner. The mutex
|
|
|
++ * doesn't become available again until the owner has called
|
|
|
++ * xSemaphoreGiveRecursive() for each successful 'take' request. For example,
|
|
|
++ * if a task successfully 'takes' the same mutex 5 times then the mutex will
|
|
|
++ * not be available to any other task until it has also 'given' the mutex back
|
|
|
++ * exactly five times.
|
|
|
++ *
|
|
|
++ * @param xMutex A handle to the mutex being released, or 'given'. This is the
|
|
|
++ * handle returned by xSemaphoreCreateMutex();
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the semaphore was given.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xMutex = NULL;
|
|
|
++ *
|
|
|
++ * // A task that creates a mutex.
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Create the mutex to guard a shared resource.
|
|
|
++ * xMutex = xSemaphoreCreateRecursiveMutex();
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // A task that uses the mutex.
|
|
|
++ * void vAnotherTask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // ... Do other things.
|
|
|
++ *
|
|
|
++ * if( xMutex != NULL )
|
|
|
++ * {
|
|
|
++ * // See if we can obtain the mutex. If the mutex is not available
|
|
|
++ * // wait 10 ticks to see if it becomes free.
|
|
|
++ * if( xSemaphoreTakeRecursive( xMutex, ( TickType_t ) 10 ) == pdTRUE )
|
|
|
++ * {
|
|
|
++ * // We were able to obtain the mutex and can now access the
|
|
|
++ * // shared resource.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ * // For some reason due to the nature of the code further calls to
|
|
|
++ * // xSemaphoreTakeRecursive() are made on the same mutex. In real
|
|
|
++ * // code these would not be just sequential calls as this would make
|
|
|
++ * // no sense. Instead the calls are likely to be buried inside
|
|
|
++ * // a more complex call structure.
|
|
|
++ * xSemaphoreTakeRecursive( xMutex, ( TickType_t ) 10 );
|
|
|
++ * xSemaphoreTakeRecursive( xMutex, ( TickType_t ) 10 );
|
|
|
++ *
|
|
|
++ * // The mutex has now been 'taken' three times, so will not be
|
|
|
++ * // available to another task until it has also been given back
|
|
|
++ * // three times. Again it is unlikely that real code would have
|
|
|
++ * // these calls sequentially, it would be more likely that the calls
|
|
|
++ * // to xSemaphoreGiveRecursive() would be called as a call stack
|
|
|
++ * // unwound. This is just for demonstrative purposes.
|
|
|
++ * xSemaphoreGiveRecursive( xMutex );
|
|
|
++ * xSemaphoreGiveRecursive( xMutex );
|
|
|
++ * xSemaphoreGiveRecursive( xMutex );
|
|
|
++ *
|
|
|
++ * // Now the mutex can be taken by other tasks.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // We could not obtain the mutex and can therefore not access
|
|
|
++ * // the shared resource safely.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreGiveRecursive xSemaphoreGiveRecursive
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configUSE_RECURSIVE_MUTEXES == 1 )
|
|
|
++ #define xSemaphoreGiveRecursive( xMutex ) xQueueGiveMutexRecursive( ( xMutex ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * xSemaphoreGiveFromISR(
|
|
|
++ * SemaphoreHandle_t xSemaphore,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * <i>Macro</i> to release a semaphore. The semaphore must have previously been
|
|
|
++ * created with a call to xSemaphoreCreateBinary() or xSemaphoreCreateCounting().
|
|
|
++ *
|
|
|
++ * Mutex type semaphores (those created using a call to xSemaphoreCreateMutex())
|
|
|
++ * must not be used with this macro.
|
|
|
++ *
|
|
|
++ * This macro can be used from an ISR.
|
|
|
++ *
|
|
|
++ * @param xSemaphore A handle to the semaphore being released. This is the
|
|
|
++ * handle returned when the semaphore was created.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xSemaphoreGiveFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if giving the semaphore caused a task
|
|
|
++ * to unblock, and the unblocked task has a priority higher than the currently
|
|
|
++ * running task. If xSemaphoreGiveFromISR() sets this value to pdTRUE then
|
|
|
++ * a context switch should be requested before the interrupt is exited.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the semaphore was successfully given, otherwise errQUEUE_FULL.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ \#define LONG_TIME 0xffff
|
|
|
++ \#define TICKS_TO_WAIT 10
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * // Repetitive task.
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // We want this task to run every 10 ticks of a timer. The semaphore
|
|
|
++ * // was created before this task was started.
|
|
|
++ *
|
|
|
++ * // Block waiting for the semaphore to become available.
|
|
|
++ * if( xSemaphoreTake( xSemaphore, LONG_TIME ) == pdTRUE )
|
|
|
++ * {
|
|
|
++ * // It is time to execute.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // We have finished our task. Return to the top of the loop where
|
|
|
++ * // we will block on the semaphore until it is time to execute
|
|
|
++ * // again. Note when using the semaphore for synchronisation with an
|
|
|
++ * // ISR in this manner there is no need to 'give' the semaphore back.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Timer ISR
|
|
|
++ * void vTimerISR( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * static uint8_t ucLocalTickCount = 0;
|
|
|
++ * static BaseType_t xHigherPriorityTaskWoken;
|
|
|
++ *
|
|
|
++ * // A timer tick has occurred.
|
|
|
++ *
|
|
|
++ * // ... Do other time functions.
|
|
|
++ *
|
|
|
++ * // Is it time for vATask () to run?
|
|
|
++ * xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ * ucLocalTickCount++;
|
|
|
++ * if( ucLocalTickCount >= TICKS_TO_WAIT )
|
|
|
++ * {
|
|
|
++ * // Unblock the task by releasing the semaphore.
|
|
|
++ * xSemaphoreGiveFromISR( xSemaphore, &xHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * // Reset the count so we release the semaphore again in 10 ticks time.
|
|
|
++ * ucLocalTickCount = 0;
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * if( xHigherPriorityTaskWoken != pdFALSE )
|
|
|
++ * {
|
|
|
++ * // We can force a context switch here. Context switching from an
|
|
|
++ * // ISR uses port specific syntax. Check the demo task for your port
|
|
|
++ * // to find the syntax required.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreGiveFromISR xSemaphoreGiveFromISR
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#define xSemaphoreGiveFromISR( xSemaphore, pxHigherPriorityTaskWoken ) xQueueGiveFromISR( ( QueueHandle_t ) ( xSemaphore ), ( pxHigherPriorityTaskWoken ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * xSemaphoreTakeFromISR(
|
|
|
++ * SemaphoreHandle_t xSemaphore,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * <i>Macro</i> to take a semaphore from an ISR. The semaphore must have
|
|
|
++ * previously been created with a call to xSemaphoreCreateBinary() or
|
|
|
++ * xSemaphoreCreateCounting().
|
|
|
++ *
|
|
|
++ * Mutex type semaphores (those created using a call to xSemaphoreCreateMutex())
|
|
|
++ * must not be used with this macro.
|
|
|
++ *
|
|
|
++ * This macro can be used from an ISR, however taking a semaphore from an ISR
|
|
|
++ * is not a common operation. It is likely to only be useful when taking a
|
|
|
++ * counting semaphore when an interrupt is obtaining an object from a resource
|
|
|
++ * pool (when the semaphore count indicates the number of resources available).
|
|
|
++ *
|
|
|
++ * @param xSemaphore A handle to the semaphore being taken. This is the
|
|
|
++ * handle returned when the semaphore was created.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xSemaphoreTakeFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if taking the semaphore caused a task
|
|
|
++ * to unblock, and the unblocked task has a priority higher than the currently
|
|
|
++ * running task. If xSemaphoreTakeFromISR() sets this value to pdTRUE then
|
|
|
++ * a context switch should be requested before the interrupt is exited.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the semaphore was successfully taken, otherwise
|
|
|
++ * pdFALSE
|
|
|
++ */
|
|
|
++#define xSemaphoreTakeFromISR( xSemaphore, pxHigherPriorityTaskWoken ) xQueueReceiveFromISR( ( QueueHandle_t ) ( xSemaphore ), NULL, ( pxHigherPriorityTaskWoken ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateMutex( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new mutex type semaphore instance, and returns a handle by which
|
|
|
++ * the new mutex can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, mutex semaphores use a block
|
|
|
++ * of memory, in which the mutex structure is stored. If a mutex is created
|
|
|
++ * using xSemaphoreCreateMutex() then the required memory is automatically
|
|
|
++ * dynamically allocated inside the xSemaphoreCreateMutex() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a mutex is created using
|
|
|
++ * xSemaphoreCreateMutexStatic() then the application writer must provided the
|
|
|
++ * memory. xSemaphoreCreateMutexStatic() therefore allows a mutex to be created
|
|
|
++ * without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Mutexes created using this function can be accessed using the xSemaphoreTake()
|
|
|
++ * and xSemaphoreGive() macros. The xSemaphoreTakeRecursive() and
|
|
|
++ * xSemaphoreGiveRecursive() macros must not be used.
|
|
|
++ *
|
|
|
++ * This type of semaphore uses a priority inheritance mechanism so a task
|
|
|
++ * 'taking' a semaphore MUST ALWAYS 'give' the semaphore back once the
|
|
|
++ * semaphore it is no longer required.
|
|
|
++ *
|
|
|
++ * Mutex type semaphores cannot be used from within interrupt service routines.
|
|
|
++ *
|
|
|
++ * See xSemaphoreCreateBinary() for an alternative implementation that can be
|
|
|
++ * used for pure synchronisation (where one task or interrupt always 'gives' the
|
|
|
++ * semaphore and another always 'takes' the semaphore) and from within interrupt
|
|
|
++ * service routines.
|
|
|
++ *
|
|
|
++ * @return If the mutex was successfully created then a handle to the created
|
|
|
++ * semaphore is returned. If there was not enough heap to allocate the mutex
|
|
|
++ * data structures then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Semaphore cannot be used before a call to xSemaphoreCreateMutex().
|
|
|
++ * // This is a macro so pass the variable in directly.
|
|
|
++ * xSemaphore = xSemaphoreCreateMutex();
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * // The semaphore was created successfully.
|
|
|
++ * // The semaphore can now be used.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateMutex xSemaphoreCreateMutex
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ #define xSemaphoreCreateMutex() xQueueCreateMutex( queueQUEUE_TYPE_MUTEX )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateMutexStatic( StaticSemaphore_t *pxMutexBuffer );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new mutex type semaphore instance, and returns a handle by which
|
|
|
++ * the new mutex can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, mutex semaphores use a block
|
|
|
++ * of memory, in which the mutex structure is stored. If a mutex is created
|
|
|
++ * using xSemaphoreCreateMutex() then the required memory is automatically
|
|
|
++ * dynamically allocated inside the xSemaphoreCreateMutex() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a mutex is created using
|
|
|
++ * xSemaphoreCreateMutexStatic() then the application writer must provided the
|
|
|
++ * memory. xSemaphoreCreateMutexStatic() therefore allows a mutex to be created
|
|
|
++ * without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Mutexes created using this function can be accessed using the xSemaphoreTake()
|
|
|
++ * and xSemaphoreGive() macros. The xSemaphoreTakeRecursive() and
|
|
|
++ * xSemaphoreGiveRecursive() macros must not be used.
|
|
|
++ *
|
|
|
++ * This type of semaphore uses a priority inheritance mechanism so a task
|
|
|
++ * 'taking' a semaphore MUST ALWAYS 'give' the semaphore back once the
|
|
|
++ * semaphore it is no longer required.
|
|
|
++ *
|
|
|
++ * Mutex type semaphores cannot be used from within interrupt service routines.
|
|
|
++ *
|
|
|
++ * See xSemaphoreCreateBinary() for an alternative implementation that can be
|
|
|
++ * used for pure synchronisation (where one task or interrupt always 'gives' the
|
|
|
++ * semaphore and another always 'takes' the semaphore) and from within interrupt
|
|
|
++ * service routines.
|
|
|
++ *
|
|
|
++ * @param pxMutexBuffer Must point to a variable of type StaticSemaphore_t,
|
|
|
++ * which will be used to hold the mutex's data structure, removing the need for
|
|
|
++ * the memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If the mutex was successfully created then a handle to the created
|
|
|
++ * mutex is returned. If pxMutexBuffer was NULL then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore;
|
|
|
++ * StaticSemaphore_t xMutexBuffer;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // A mutex cannot be used before it has been created. xMutexBuffer is
|
|
|
++ * // into xSemaphoreCreateMutexStatic() so no dynamic memory allocation is
|
|
|
++ * // attempted.
|
|
|
++ * xSemaphore = xSemaphoreCreateMutexStatic( &xMutexBuffer );
|
|
|
++ *
|
|
|
++ * // As no dynamic memory allocation was performed, xSemaphore cannot be NULL,
|
|
|
++ * // so there is no need to check it.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateMutexStatic xSemaphoreCreateMutexStatic
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ #define xSemaphoreCreateMutexStatic( pxMutexBuffer ) xQueueCreateMutexStatic( queueQUEUE_TYPE_MUTEX, ( StaticQueue_t * ) ( pxMutexBuffer ) )
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateRecursiveMutex( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new recursive mutex type semaphore instance, and returns a handle
|
|
|
++ * by which the new recursive mutex can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, recursive mutexs use a block
|
|
|
++ * of memory, in which the mutex structure is stored. If a recursive mutex is
|
|
|
++ * created using xSemaphoreCreateRecursiveMutex() then the required memory is
|
|
|
++ * automatically dynamically allocated inside the
|
|
|
++ * xSemaphoreCreateRecursiveMutex() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a recursive mutex is created using
|
|
|
++ * xSemaphoreCreateRecursiveMutexStatic() then the application writer must
|
|
|
++ * provide the memory that will get used by the mutex.
|
|
|
++ * xSemaphoreCreateRecursiveMutexStatic() therefore allows a recursive mutex to
|
|
|
++ * be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Mutexes created using this macro can be accessed using the
|
|
|
++ * xSemaphoreTakeRecursive() and xSemaphoreGiveRecursive() macros. The
|
|
|
++ * xSemaphoreTake() and xSemaphoreGive() macros must not be used.
|
|
|
++ *
|
|
|
++ * A mutex used recursively can be 'taken' repeatedly by the owner. The mutex
|
|
|
++ * doesn't become available again until the owner has called
|
|
|
++ * xSemaphoreGiveRecursive() for each successful 'take' request. For example,
|
|
|
++ * if a task successfully 'takes' the same mutex 5 times then the mutex will
|
|
|
++ * not be available to any other task until it has also 'given' the mutex back
|
|
|
++ * exactly five times.
|
|
|
++ *
|
|
|
++ * This type of semaphore uses a priority inheritance mechanism so a task
|
|
|
++ * 'taking' a semaphore MUST ALWAYS 'give' the semaphore back once the
|
|
|
++ * semaphore it is no longer required.
|
|
|
++ *
|
|
|
++ * Mutex type semaphores cannot be used from within interrupt service routines.
|
|
|
++ *
|
|
|
++ * See xSemaphoreCreateBinary() for an alternative implementation that can be
|
|
|
++ * used for pure synchronisation (where one task or interrupt always 'gives' the
|
|
|
++ * semaphore and another always 'takes' the semaphore) and from within interrupt
|
|
|
++ * service routines.
|
|
|
++ *
|
|
|
++ * @return xSemaphore Handle to the created mutex semaphore. Should be of type
|
|
|
++ * SemaphoreHandle_t.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Semaphore cannot be used before a call to xSemaphoreCreateMutex().
|
|
|
++ * // This is a macro so pass the variable in directly.
|
|
|
++ * xSemaphore = xSemaphoreCreateRecursiveMutex();
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * // The semaphore was created successfully.
|
|
|
++ * // The semaphore can now be used.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateRecursiveMutex xSemaphoreCreateRecursiveMutex
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configUSE_RECURSIVE_MUTEXES == 1 ) )
|
|
|
++ #define xSemaphoreCreateRecursiveMutex() xQueueCreateMutex( queueQUEUE_TYPE_RECURSIVE_MUTEX )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateRecursiveMutexStatic( StaticSemaphore_t *pxMutexBuffer );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new recursive mutex type semaphore instance, and returns a handle
|
|
|
++ * by which the new recursive mutex can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, recursive mutexs use a block
|
|
|
++ * of memory, in which the mutex structure is stored. If a recursive mutex is
|
|
|
++ * created using xSemaphoreCreateRecursiveMutex() then the required memory is
|
|
|
++ * automatically dynamically allocated inside the
|
|
|
++ * xSemaphoreCreateRecursiveMutex() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a recursive mutex is created using
|
|
|
++ * xSemaphoreCreateRecursiveMutexStatic() then the application writer must
|
|
|
++ * provide the memory that will get used by the mutex.
|
|
|
++ * xSemaphoreCreateRecursiveMutexStatic() therefore allows a recursive mutex to
|
|
|
++ * be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Mutexes created using this macro can be accessed using the
|
|
|
++ * xSemaphoreTakeRecursive() and xSemaphoreGiveRecursive() macros. The
|
|
|
++ * xSemaphoreTake() and xSemaphoreGive() macros must not be used.
|
|
|
++ *
|
|
|
++ * A mutex used recursively can be 'taken' repeatedly by the owner. The mutex
|
|
|
++ * doesn't become available again until the owner has called
|
|
|
++ * xSemaphoreGiveRecursive() for each successful 'take' request. For example,
|
|
|
++ * if a task successfully 'takes' the same mutex 5 times then the mutex will
|
|
|
++ * not be available to any other task until it has also 'given' the mutex back
|
|
|
++ * exactly five times.
|
|
|
++ *
|
|
|
++ * This type of semaphore uses a priority inheritance mechanism so a task
|
|
|
++ * 'taking' a semaphore MUST ALWAYS 'give' the semaphore back once the
|
|
|
++ * semaphore it is no longer required.
|
|
|
++ *
|
|
|
++ * Mutex type semaphores cannot be used from within interrupt service routines.
|
|
|
++ *
|
|
|
++ * See xSemaphoreCreateBinary() for an alternative implementation that can be
|
|
|
++ * used for pure synchronisation (where one task or interrupt always 'gives' the
|
|
|
++ * semaphore and another always 'takes' the semaphore) and from within interrupt
|
|
|
++ * service routines.
|
|
|
++ *
|
|
|
++ * @param pxMutexBuffer Must point to a variable of type StaticSemaphore_t,
|
|
|
++ * which will then be used to hold the recursive mutex's data structure,
|
|
|
++ * removing the need for the memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If the recursive mutex was successfully created then a handle to the
|
|
|
++ * created recursive mutex is returned. If pxMutexBuffer was NULL then NULL is
|
|
|
++ * returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore;
|
|
|
++ * StaticSemaphore_t xMutexBuffer;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // A recursive semaphore cannot be used before it is created. Here a
|
|
|
++ * // recursive mutex is created using xSemaphoreCreateRecursiveMutexStatic().
|
|
|
++ * // The address of xMutexBuffer is passed into the function, and will hold
|
|
|
++ * // the mutexes data structures - so no dynamic memory allocation will be
|
|
|
++ * // attempted.
|
|
|
++ * xSemaphore = xSemaphoreCreateRecursiveMutexStatic( &xMutexBuffer );
|
|
|
++ *
|
|
|
++ * // As no dynamic memory allocation was performed, xSemaphore cannot be NULL,
|
|
|
++ * // so there is no need to check it.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateRecursiveMutexStatic xSemaphoreCreateRecursiveMutexStatic
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( ( configSUPPORT_STATIC_ALLOCATION == 1 ) && ( configUSE_RECURSIVE_MUTEXES == 1 ) )
|
|
|
++ #define xSemaphoreCreateRecursiveMutexStatic( pxStaticSemaphore ) xQueueCreateMutexStatic( queueQUEUE_TYPE_RECURSIVE_MUTEX, ( StaticQueue_t * ) pxStaticSemaphore )
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateCounting( UBaseType_t uxMaxCount, UBaseType_t uxInitialCount );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new counting semaphore instance, and returns a handle by which the
|
|
|
++ * new counting semaphore can be referenced.
|
|
|
++ *
|
|
|
++ * In many usage scenarios it is faster and more memory efficient to use a
|
|
|
++ * direct to task notification in place of a counting semaphore!
|
|
|
++ * https://www.FreeRTOS.org/RTOS-task-notifications.html
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, counting semaphores use a
|
|
|
++ * block of memory, in which the counting semaphore structure is stored. If a
|
|
|
++ * counting semaphore is created using xSemaphoreCreateCounting() then the
|
|
|
++ * required memory is automatically dynamically allocated inside the
|
|
|
++ * xSemaphoreCreateCounting() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a counting semaphore is created
|
|
|
++ * using xSemaphoreCreateCountingStatic() then the application writer can
|
|
|
++ * instead optionally provide the memory that will get used by the counting
|
|
|
++ * semaphore. xSemaphoreCreateCountingStatic() therefore allows a counting
|
|
|
++ * semaphore to be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Counting semaphores are typically used for two things:
|
|
|
++ *
|
|
|
++ * 1) Counting events.
|
|
|
++ *
|
|
|
++ * In this usage scenario an event handler will 'give' a semaphore each time
|
|
|
++ * an event occurs (incrementing the semaphore count value), and a handler
|
|
|
++ * task will 'take' a semaphore each time it processes an event
|
|
|
++ * (decrementing the semaphore count value). The count value is therefore
|
|
|
++ * the difference between the number of events that have occurred and the
|
|
|
++ * number that have been processed. In this case it is desirable for the
|
|
|
++ * initial count value to be zero.
|
|
|
++ *
|
|
|
++ * 2) Resource management.
|
|
|
++ *
|
|
|
++ * In this usage scenario the count value indicates the number of resources
|
|
|
++ * available. To obtain control of a resource a task must first obtain a
|
|
|
++ * semaphore - decrementing the semaphore count value. When the count value
|
|
|
++ * reaches zero there are no free resources. When a task finishes with the
|
|
|
++ * resource it 'gives' the semaphore back - incrementing the semaphore count
|
|
|
++ * value. In this case it is desirable for the initial count value to be
|
|
|
++ * equal to the maximum count value, indicating that all resources are free.
|
|
|
++ *
|
|
|
++ * @param uxMaxCount The maximum count value that can be reached. When the
|
|
|
++ * semaphore reaches this value it can no longer be 'given'.
|
|
|
++ *
|
|
|
++ * @param uxInitialCount The count value assigned to the semaphore when it is
|
|
|
++ * created.
|
|
|
++ *
|
|
|
++ * @return Handle to the created semaphore. Null if the semaphore could not be
|
|
|
++ * created.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * // Semaphore cannot be used before a call to xSemaphoreCreateCounting().
|
|
|
++ * // The max value to which the semaphore can count should be 10, and the
|
|
|
++ * // initial value assigned to the count should be 0.
|
|
|
++ * xSemaphore = xSemaphoreCreateCounting( 10, 0 );
|
|
|
++ *
|
|
|
++ * if( xSemaphore != NULL )
|
|
|
++ * {
|
|
|
++ * // The semaphore was created successfully.
|
|
|
++ * // The semaphore can now be used.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateCounting xSemaphoreCreateCounting
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ #define xSemaphoreCreateCounting( uxMaxCount, uxInitialCount ) xQueueCreateCountingSemaphore( ( uxMaxCount ), ( uxInitialCount ) )
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphoreCreateCountingStatic( UBaseType_t uxMaxCount, UBaseType_t uxInitialCount, StaticSemaphore_t *pxSemaphoreBuffer );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Creates a new counting semaphore instance, and returns a handle by which the
|
|
|
++ * new counting semaphore can be referenced.
|
|
|
++ *
|
|
|
++ * In many usage scenarios it is faster and more memory efficient to use a
|
|
|
++ * direct to task notification in place of a counting semaphore!
|
|
|
++ * https://www.FreeRTOS.org/RTOS-task-notifications.html
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, counting semaphores use a
|
|
|
++ * block of memory, in which the counting semaphore structure is stored. If a
|
|
|
++ * counting semaphore is created using xSemaphoreCreateCounting() then the
|
|
|
++ * required memory is automatically dynamically allocated inside the
|
|
|
++ * xSemaphoreCreateCounting() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a counting semaphore is created
|
|
|
++ * using xSemaphoreCreateCountingStatic() then the application writer must
|
|
|
++ * provide the memory. xSemaphoreCreateCountingStatic() therefore allows a
|
|
|
++ * counting semaphore to be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Counting semaphores are typically used for two things:
|
|
|
++ *
|
|
|
++ * 1) Counting events.
|
|
|
++ *
|
|
|
++ * In this usage scenario an event handler will 'give' a semaphore each time
|
|
|
++ * an event occurs (incrementing the semaphore count value), and a handler
|
|
|
++ * task will 'take' a semaphore each time it processes an event
|
|
|
++ * (decrementing the semaphore count value). The count value is therefore
|
|
|
++ * the difference between the number of events that have occurred and the
|
|
|
++ * number that have been processed. In this case it is desirable for the
|
|
|
++ * initial count value to be zero.
|
|
|
++ *
|
|
|
++ * 2) Resource management.
|
|
|
++ *
|
|
|
++ * In this usage scenario the count value indicates the number of resources
|
|
|
++ * available. To obtain control of a resource a task must first obtain a
|
|
|
++ * semaphore - decrementing the semaphore count value. When the count value
|
|
|
++ * reaches zero there are no free resources. When a task finishes with the
|
|
|
++ * resource it 'gives' the semaphore back - incrementing the semaphore count
|
|
|
++ * value. In this case it is desirable for the initial count value to be
|
|
|
++ * equal to the maximum count value, indicating that all resources are free.
|
|
|
++ *
|
|
|
++ * @param uxMaxCount The maximum count value that can be reached. When the
|
|
|
++ * semaphore reaches this value it can no longer be 'given'.
|
|
|
++ *
|
|
|
++ * @param uxInitialCount The count value assigned to the semaphore when it is
|
|
|
++ * created.
|
|
|
++ *
|
|
|
++ * @param pxSemaphoreBuffer Must point to a variable of type StaticSemaphore_t,
|
|
|
++ * which will then be used to hold the semaphore's data structure, removing the
|
|
|
++ * need for the memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If the counting semaphore was successfully created then a handle to
|
|
|
++ * the created counting semaphore is returned. If pxSemaphoreBuffer was NULL
|
|
|
++ * then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * SemaphoreHandle_t xSemaphore;
|
|
|
++ * StaticSemaphore_t xSemaphoreBuffer;
|
|
|
++ *
|
|
|
++ * void vATask( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * SemaphoreHandle_t xSemaphore = NULL;
|
|
|
++ *
|
|
|
++ * // Counting semaphore cannot be used before they have been created. Create
|
|
|
++ * // a counting semaphore using xSemaphoreCreateCountingStatic(). The max
|
|
|
++ * // value to which the semaphore can count is 10, and the initial value
|
|
|
++ * // assigned to the count will be 0. The address of xSemaphoreBuffer is
|
|
|
++ * // passed in and will be used to hold the semaphore structure, so no dynamic
|
|
|
++ * // memory allocation will be used.
|
|
|
++ * xSemaphore = xSemaphoreCreateCounting( 10, 0, &xSemaphoreBuffer );
|
|
|
++ *
|
|
|
++ * // No memory allocation was attempted so xSemaphore cannot be NULL, so there
|
|
|
++ * // is no need to check its value.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xSemaphoreCreateCountingStatic xSemaphoreCreateCountingStatic
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ #define xSemaphoreCreateCountingStatic( uxMaxCount, uxInitialCount, pxSemaphoreBuffer ) xQueueCreateCountingSemaphoreStatic( ( uxMaxCount ), ( uxInitialCount ), ( StaticQueue_t * ) ( pxSemaphoreBuffer ) )
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr. h
|
|
|
++ * @code{c}
|
|
|
++ * void vSemaphoreDelete( SemaphoreHandle_t xSemaphore );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Delete a semaphore. This function must be used with care. For example,
|
|
|
++ * do not delete a mutex type semaphore if the mutex is held by a task.
|
|
|
++ *
|
|
|
++ * @param xSemaphore A handle to the semaphore to be deleted.
|
|
|
++ *
|
|
|
++ * \defgroup vSemaphoreDelete vSemaphoreDelete
|
|
|
++ * \ingroup Semaphores
|
|
|
++ */
|
|
|
++#define vSemaphoreDelete( xSemaphore ) vQueueDelete( ( QueueHandle_t ) ( xSemaphore ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr.h
|
|
|
++ * @code{c}
|
|
|
++ * TaskHandle_t xSemaphoreGetMutexHolder( SemaphoreHandle_t xMutex );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * If xMutex is indeed a mutex type semaphore, return the current mutex holder.
|
|
|
++ * If xMutex is not a mutex type semaphore, or the mutex is available (not held
|
|
|
++ * by a task), return NULL.
|
|
|
++ *
|
|
|
++ * Note: This is a good way of determining if the calling task is the mutex
|
|
|
++ * holder, but not a good way of determining the identity of the mutex holder as
|
|
|
++ * the holder may change between the function exiting and the returned value
|
|
|
++ * being tested.
|
|
|
++ */
|
|
|
++#define xSemaphoreGetMutexHolder( xSemaphore ) xQueueGetMutexHolder( ( xSemaphore ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr.h
|
|
|
++ * @code{c}
|
|
|
++ * TaskHandle_t xSemaphoreGetMutexHolderFromISR( SemaphoreHandle_t xMutex );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * If xMutex is indeed a mutex type semaphore, return the current mutex holder.
|
|
|
++ * If xMutex is not a mutex type semaphore, or the mutex is available (not held
|
|
|
++ * by a task), return NULL.
|
|
|
++ *
|
|
|
++ */
|
|
|
++#define xSemaphoreGetMutexHolderFromISR( xSemaphore ) xQueueGetMutexHolderFromISR( ( xSemaphore ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr.h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxSemaphoreGetCount( SemaphoreHandle_t xSemaphore );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * If the semaphore is a counting semaphore then uxSemaphoreGetCount() returns
|
|
|
++ * its current count value. If the semaphore is a binary semaphore then
|
|
|
++ * uxSemaphoreGetCount() returns 1 if the semaphore is available, and 0 if the
|
|
|
++ * semaphore is not available.
|
|
|
++ *
|
|
|
++ */
|
|
|
++#define uxSemaphoreGetCount( xSemaphore ) uxQueueMessagesWaiting( ( QueueHandle_t ) ( xSemaphore ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * semphr.h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxSemaphoreGetCountFromISR( SemaphoreHandle_t xSemaphore );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * If the semaphore is a counting semaphore then uxSemaphoreGetCountFromISR() returns
|
|
|
++ * its current count value. If the semaphore is a binary semaphore then
|
|
|
++ * uxSemaphoreGetCountFromISR() returns 1 if the semaphore is available, and 0 if the
|
|
|
++ * semaphore is not available.
|
|
|
++ *
|
|
|
++ */
|
|
|
++#define uxSemaphoreGetCountFromISR( xSemaphore ) uxQueueMessagesWaitingFromISR( ( QueueHandle_t ) ( xSemaphore ) )
|
|
|
++
|
|
|
++#endif /* SEMAPHORE_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/task.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/task.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..20f6a52104
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/task.h
|
|
|
+@@ -0,0 +1,2265 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++#ifndef INC_TASK_H
|
|
|
++#define INC_TASK_H
|
|
|
++
|
|
|
++#ifndef INC_FREERTOS_H
|
|
|
++ #error "include FreeRTOS.h must appear in source files before include task.h"
|
|
|
++#endif
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* MACROS AND DEFINITIONS
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/*
|
|
|
++ * If tskKERNEL_VERSION_NUMBER ends with + it represents the version in development
|
|
|
++ * after the numbered release.
|
|
|
++ *
|
|
|
++ * The tskKERNEL_VERSION_MAJOR, tskKERNEL_VERSION_MINOR, tskKERNEL_VERSION_BUILD
|
|
|
++ * values will reflect the last released version number.
|
|
|
++ */
|
|
|
++#define tskKERNEL_VERSION_NUMBER "V10.4.6"
|
|
|
++#define tskKERNEL_VERSION_MAJOR 10
|
|
|
++#define tskKERNEL_VERSION_MINOR 4
|
|
|
++#define tskKERNEL_VERSION_BUILD 6
|
|
|
++
|
|
|
++/* The direct to task notification feature used to have only a single notification
|
|
|
++ * per task. Now there is an array of notifications per task that is dimensioned by
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES. For backward compatibility, any use of the
|
|
|
++ * original direct to task notification defaults to using the first index in the
|
|
|
++ * array. */
|
|
|
++#define tskDEFAULT_INDEX_TO_NOTIFY ( 0 )
|
|
|
++
|
|
|
++/* ESP32 */
|
|
|
++#define tskNO_AFFINITY ( 0x7FFFFFFF )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ *
|
|
|
++ * Type by which tasks are referenced. For example, a call to xTaskCreate
|
|
|
++ * returns (via a pointer parameter) an TaskHandle_t variable that can then
|
|
|
++ * be used as a parameter to vTaskDelete to delete the task.
|
|
|
++ *
|
|
|
++ * \defgroup TaskHandle_t TaskHandle_t
|
|
|
++ * \ingroup Tasks
|
|
|
++ */
|
|
|
++struct tskTaskControlBlock; /* The old naming convention is used to prevent breaking kernel aware debuggers. */
|
|
|
++typedef struct tskTaskControlBlock * TaskHandle_t;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Defines the prototype to which the application task hook function must
|
|
|
++ * conform.
|
|
|
++ */
|
|
|
++typedef BaseType_t (* TaskHookFunction_t)( void * );
|
|
|
++
|
|
|
++/* Task states returned by eTaskGetState. */
|
|
|
++typedef enum
|
|
|
++{
|
|
|
++ eRunning = 0, /* A task is querying the state of itself, so must be running. */
|
|
|
++ eReady, /* The task being queried is in a ready or pending ready list. */
|
|
|
++ eBlocked, /* The task being queried is in the Blocked state. */
|
|
|
++ eSuspended, /* The task being queried is in the Suspended state, or is in the Blocked state with an infinite time out. */
|
|
|
++ eDeleted, /* The task being queried has been deleted, but its TCB has not yet been freed. */
|
|
|
++ eInvalid /* Used as an 'invalid state' value. */
|
|
|
++} eTaskState;
|
|
|
++
|
|
|
++/* Actions that can be performed when vTaskNotify() is called. */
|
|
|
++typedef enum
|
|
|
++{
|
|
|
++ eNoAction = 0, /* Notify the task without updating its notify value. */
|
|
|
++ eSetBits, /* Set bits in the task's notification value. */
|
|
|
++ eIncrement, /* Increment the task's notification value. */
|
|
|
++ eSetValueWithOverwrite, /* Set the task's notification value to a specific value even if the previous value has not yet been read by the task. */
|
|
|
++ eSetValueWithoutOverwrite /* Set the task's notification value if the previous value has been read by the task. */
|
|
|
++} eNotifyAction;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Used internally only.
|
|
|
++ */
|
|
|
++typedef struct xTIME_OUT
|
|
|
++{
|
|
|
++ BaseType_t xOverflowCount;
|
|
|
++ TickType_t xTimeOnEntering;
|
|
|
++} TimeOut_t;
|
|
|
++
|
|
|
++/**
|
|
|
++ * Defines the priority used by the idle task. This must not be modified.
|
|
|
++ *
|
|
|
++ * \ingroup TaskUtils
|
|
|
++ */
|
|
|
++#define tskIDLE_PRIORITY ( ( UBaseType_t ) 0U )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ *
|
|
|
++ * Macro for forcing a context switch.
|
|
|
++ *
|
|
|
++ * \defgroup taskYIELD taskYIELD
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++#define taskYIELD() portYIELD()
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ *
|
|
|
++ * Macro to mark the start of a critical code region. Preemptive context
|
|
|
++ * switches cannot occur when in a critical region.
|
|
|
++ *
|
|
|
++ * NOTE: This may alter the stack (depending on the portable implementation)
|
|
|
++ * so must be used with care!
|
|
|
++ *
|
|
|
++ * \defgroup taskENTER_CRITICAL taskENTER_CRITICAL
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++#define taskENTER_CRITICAL() portENTER_CRITICAL()
|
|
|
++#define taskENTER_CRITICAL_FROM_ISR() portSET_INTERRUPT_MASK_FROM_ISR()
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ *
|
|
|
++ * Macro to mark the end of a critical code region. Preemptive context
|
|
|
++ * switches cannot occur when in a critical region.
|
|
|
++ *
|
|
|
++ * NOTE: This may alter the stack (depending on the portable implementation)
|
|
|
++ * so must be used with care!
|
|
|
++ *
|
|
|
++ * \defgroup taskEXIT_CRITICAL taskEXIT_CRITICAL
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++#define taskEXIT_CRITICAL() portEXIT_CRITICAL()
|
|
|
++#define taskEXIT_CRITICAL_FROM_ISR( x ) portCLEAR_INTERRUPT_MASK_FROM_ISR( x )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ *
|
|
|
++ * Macro to disable all maskable interrupts.
|
|
|
++ *
|
|
|
++ * \defgroup taskDISABLE_INTERRUPTS taskDISABLE_INTERRUPTS
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++#define taskDISABLE_INTERRUPTS() portDISABLE_INTERRUPTS()
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ *
|
|
|
++ * Macro to enable microcontroller interrupts.
|
|
|
++ *
|
|
|
++ * \defgroup taskENABLE_INTERRUPTS taskENABLE_INTERRUPTS
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++#define taskENABLE_INTERRUPTS() portENABLE_INTERRUPTS()
|
|
|
++
|
|
|
++/* Definitions returned by xTaskGetSchedulerState(). taskSCHEDULER_SUSPENDED is
|
|
|
++ * 0 to generate more optimal code when configASSERT() is defined as the constant
|
|
|
++ * is used in assert() statements. */
|
|
|
++#define taskSCHEDULER_SUSPENDED ( ( BaseType_t ) 0 )
|
|
|
++#define taskSCHEDULER_NOT_STARTED ( ( BaseType_t ) 1 )
|
|
|
++#define taskSCHEDULER_RUNNING ( ( BaseType_t ) 2 )
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* TASK CREATION API
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskCreate(
|
|
|
++ * TaskFunction_t pxTaskCode,
|
|
|
++ * const char *pcName,
|
|
|
++ * configSTACK_DEPTH_TYPE usStackDepth,
|
|
|
++ * void *pvParameters,
|
|
|
++ * UBaseType_t uxPriority,
|
|
|
++ * TaskHandle_t *pxCreatedTask
|
|
|
++ * );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Create a new task and add it to the list of tasks that are ready to run.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, tasks use two blocks of
|
|
|
++ * memory. The first block is used to hold the task's data structures. The
|
|
|
++ * second block is used by the task as its stack. If a task is created using
|
|
|
++ * xTaskCreate() then both blocks of memory are automatically dynamically
|
|
|
++ * allocated inside the xTaskCreate() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a task is created using
|
|
|
++ * xTaskCreateStatic() then the application writer must provide the required
|
|
|
++ * memory. xTaskCreateStatic() therefore allows a task to be created without
|
|
|
++ * using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * See xTaskCreateStatic() for a version that does not use any dynamic memory
|
|
|
++ * allocation.
|
|
|
++ *
|
|
|
++ * xTaskCreate() can only be used to create a task that has unrestricted
|
|
|
++ * access to the entire microcontroller memory map. Systems that include MPU
|
|
|
++ * support can alternatively create an MPU constrained task using
|
|
|
++ * xTaskCreateRestricted().
|
|
|
++ *
|
|
|
++ * @param pxTaskCode Pointer to the task entry function. Tasks
|
|
|
++ * must be implemented to never return (i.e. continuous loop).
|
|
|
++ *
|
|
|
++ * @param pcName A descriptive name for the task. This is mainly used to
|
|
|
++ * facilitate debugging. Max length defined by configMAX_TASK_NAME_LEN - default
|
|
|
++ * is 16.
|
|
|
++ *
|
|
|
++ * @param usStackDepth The size of the task stack specified as the number of
|
|
|
++ * variables the stack can hold - not the number of bytes. For example, if
|
|
|
++ * the stack is 16 bits wide and usStackDepth is defined as 100, 200 bytes
|
|
|
++ * will be allocated for stack storage.
|
|
|
++ *
|
|
|
++ * @param pvParameters Pointer that will be used as the parameter for the task
|
|
|
++ * being created.
|
|
|
++ *
|
|
|
++ * @param uxPriority The priority at which the task should run. Systems that
|
|
|
++ * include MPU support can optionally create tasks in a privileged (system)
|
|
|
++ * mode by setting bit portPRIVILEGE_BIT of the priority parameter. For
|
|
|
++ * example, to create a privileged task at priority 2 the uxPriority parameter
|
|
|
++ * should be set to ( 2 | portPRIVILEGE_BIT ).
|
|
|
++ *
|
|
|
++ * @param pxCreatedTask Used to pass back a handle by which the created task
|
|
|
++ * can be referenced.
|
|
|
++ *
|
|
|
++ * @return pdPASS if the task was successfully created and added to a ready
|
|
|
++ * list, otherwise an error code defined in the file projdefs.h
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * // Task to be created.
|
|
|
++ * void vTaskCode( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Task code goes here.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Function that creates a task.
|
|
|
++ * void vOtherFunction( void )
|
|
|
++ * {
|
|
|
++ * static uint8_t ucParameterToPass;
|
|
|
++ * TaskHandle_t xHandle = NULL;
|
|
|
++ *
|
|
|
++ * // Create the task, storing the handle. Note that the passed parameter ucParameterToPass
|
|
|
++ * // must exist for the lifetime of the task, so in this case is declared static. If it was just an
|
|
|
++ * // an automatic stack variable it might no longer exist, or at least have been corrupted, by the time
|
|
|
++ * // the new task attempts to access it.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, &ucParameterToPass, tskIDLE_PRIORITY, &xHandle );
|
|
|
++ * configASSERT( xHandle );
|
|
|
++ *
|
|
|
++ * // Use the handle to delete the task.
|
|
|
++ * if( xHandle != NULL )
|
|
|
++ * {
|
|
|
++ * vTaskDelete( xHandle );
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xTaskCreate xTaskCreate
|
|
|
++ * \ingroup Tasks
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,
|
|
|
++ const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++ const configSTACK_DEPTH_TYPE usStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ TaskHandle_t * const pxCreatedTask );
|
|
|
++#endif
|
|
|
++/* ESP32 */
|
|
|
++#if( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ BaseType_t xTaskCreatePinnedToCore( TaskFunction_t pvTaskCode,
|
|
|
++ const char * const pcName,
|
|
|
++ const uint32_t usStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ TaskHandle_t * const pvCreatedTask,
|
|
|
++ const BaseType_t xCoreID);
|
|
|
++
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode,
|
|
|
++ * const char *pcName,
|
|
|
++ * uint32_t ulStackDepth,
|
|
|
++ * void *pvParameters,
|
|
|
++ * UBaseType_t uxPriority,
|
|
|
++ * StackType_t *puxStackBuffer,
|
|
|
++ * StaticTask_t *pxTaskBuffer );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Create a new task and add it to the list of tasks that are ready to run.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, tasks use two blocks of
|
|
|
++ * memory. The first block is used to hold the task's data structures. The
|
|
|
++ * second block is used by the task as its stack. If a task is created using
|
|
|
++ * xTaskCreate() then both blocks of memory are automatically dynamically
|
|
|
++ * allocated inside the xTaskCreate() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a task is created using
|
|
|
++ * xTaskCreateStatic() then the application writer must provide the required
|
|
|
++ * memory. xTaskCreateStatic() therefore allows a task to be created without
|
|
|
++ * using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * @param pxTaskCode Pointer to the task entry function. Tasks
|
|
|
++ * must be implemented to never return (i.e. continuous loop).
|
|
|
++ *
|
|
|
++ * @param pcName A descriptive name for the task. This is mainly used to
|
|
|
++ * facilitate debugging. The maximum length of the string is defined by
|
|
|
++ * configMAX_TASK_NAME_LEN in FreeRTOSConfig.h.
|
|
|
++ *
|
|
|
++ * @param ulStackDepth The size of the task stack specified as the number of
|
|
|
++ * variables the stack can hold - not the number of bytes. For example, if
|
|
|
++ * the stack is 32-bits wide and ulStackDepth is defined as 100 then 400 bytes
|
|
|
++ * will be allocated for stack storage.
|
|
|
++ *
|
|
|
++ * @param pvParameters Pointer that will be used as the parameter for the task
|
|
|
++ * being created.
|
|
|
++ *
|
|
|
++ * @param uxPriority The priority at which the task will run.
|
|
|
++ *
|
|
|
++ * @param puxStackBuffer Must point to a StackType_t array that has at least
|
|
|
++ * ulStackDepth indexes - the array will then be used as the task's stack,
|
|
|
++ * removing the need for the stack to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @param pxTaskBuffer Must point to a variable of type StaticTask_t, which will
|
|
|
++ * then be used to hold the task's data structures, removing the need for the
|
|
|
++ * memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If neither puxStackBuffer nor pxTaskBuffer are NULL, then the task
|
|
|
++ * will be created and a handle to the created task is returned. If either
|
|
|
++ * puxStackBuffer or pxTaskBuffer are NULL then the task will not be created and
|
|
|
++ * NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ *
|
|
|
++ * // Dimensions of the buffer that the task being created will use as its stack.
|
|
|
++ * // NOTE: This is the number of words the stack will hold, not the number of
|
|
|
++ * // bytes. For example, if each stack item is 32-bits, and this is set to 100,
|
|
|
++ * // then 400 bytes (100 * 32-bits) will be allocated.
|
|
|
++ #define STACK_SIZE 200
|
|
|
++ *
|
|
|
++ * // Structure that will hold the TCB of the task being created.
|
|
|
++ * StaticTask_t xTaskBuffer;
|
|
|
++ *
|
|
|
++ * // Buffer that the task being created will use as its stack. Note this is
|
|
|
++ * // an array of StackType_t variables. The size of StackType_t is dependent on
|
|
|
++ * // the RTOS port.
|
|
|
++ * StackType_t xStack[ STACK_SIZE ];
|
|
|
++ *
|
|
|
++ * // Function that implements the task being created.
|
|
|
++ * void vTaskCode( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // The parameter value is expected to be 1 as 1 is passed in the
|
|
|
++ * // pvParameters value in the call to xTaskCreateStatic().
|
|
|
++ * configASSERT( ( uint32_t ) pvParameters == 1UL );
|
|
|
++ *
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Task code goes here.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Function that creates a task.
|
|
|
++ * void vOtherFunction( void )
|
|
|
++ * {
|
|
|
++ * TaskHandle_t xHandle = NULL;
|
|
|
++ *
|
|
|
++ * // Create the task without using any dynamic memory allocation.
|
|
|
++ * xHandle = xTaskCreateStatic(
|
|
|
++ * vTaskCode, // Function that implements the task.
|
|
|
++ * "NAME", // Text name for the task.
|
|
|
++ * STACK_SIZE, // Stack size in words, not bytes.
|
|
|
++ * ( void * ) 1, // Parameter passed into the task.
|
|
|
++ * tskIDLE_PRIORITY,// Priority at which the task is created.
|
|
|
++ * xStack, // Array to use as the task's stack.
|
|
|
++ * &xTaskBuffer ); // Variable to hold the task's data structure.
|
|
|
++ *
|
|
|
++ * // puxStackBuffer and pxTaskBuffer were not NULL, so the task will have
|
|
|
++ * // been created, and xHandle will be the task's handle. Use the handle
|
|
|
++ * // to suspend the task.
|
|
|
++ * vTaskSuspend( xHandle );
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xTaskCreateStatic xTaskCreateStatic
|
|
|
++ * \ingroup Tasks
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode,
|
|
|
++ const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++ const uint32_t ulStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ StackType_t * const puxStackBuffer,
|
|
|
++ StaticTask_t * const pxTaskBuffer );
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskDelete( TaskHandle_t xTaskToDelete );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_vTaskDelete must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Remove a task from the RTOS real time kernel's management. The task being
|
|
|
++ * deleted will be removed from all ready, blocked, suspended and event lists.
|
|
|
++ *
|
|
|
++ * NOTE: The idle task is responsible for freeing the kernel allocated
|
|
|
++ * memory from tasks that have been deleted. It is therefore important that
|
|
|
++ * the idle task is not starved of microcontroller processing time if your
|
|
|
++ * application makes any calls to vTaskDelete (). Memory allocated by the
|
|
|
++ * task code is not automatically freed, and should be freed before the task
|
|
|
++ * is deleted.
|
|
|
++ *
|
|
|
++ * See the demo application file death.c for sample code that utilises
|
|
|
++ * vTaskDelete ().
|
|
|
++ *
|
|
|
++ * @param xTaskToDelete The handle of the task to be deleted. Passing NULL will
|
|
|
++ * cause the calling task to be deleted.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vOtherFunction( void )
|
|
|
++ * {
|
|
|
++ * TaskHandle_t xHandle;
|
|
|
++ *
|
|
|
++ * // Create the task, storing the handle.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle );
|
|
|
++ *
|
|
|
++ * // Use the handle to delete the task.
|
|
|
++ * vTaskDelete( xHandle );
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup vTaskDelete vTaskDelete
|
|
|
++ * \ingroup Tasks
|
|
|
++ */
|
|
|
++void vTaskDelete( TaskHandle_t xTaskToDelete );
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* TASK CONTROL API
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskDelay( const TickType_t xTicksToDelay );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Delay a task for a given number of ticks. The actual time that the
|
|
|
++ * task remains blocked depends on the tick rate. The constant
|
|
|
++ * portTICK_PERIOD_MS can be used to calculate real time from the tick
|
|
|
++ * rate - with the resolution of one tick period.
|
|
|
++ *
|
|
|
++ * INCLUDE_vTaskDelay must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ *
|
|
|
++ * vTaskDelay() specifies a time at which the task wishes to unblock relative to
|
|
|
++ * the time at which vTaskDelay() is called. For example, specifying a block
|
|
|
++ * period of 100 ticks will cause the task to unblock 100 ticks after
|
|
|
++ * vTaskDelay() is called. vTaskDelay() does not therefore provide a good method
|
|
|
++ * of controlling the frequency of a periodic task as the path taken through the
|
|
|
++ * code, as well as other task and interrupt activity, will affect the frequency
|
|
|
++ * at which vTaskDelay() gets called and therefore the time at which the task
|
|
|
++ * next executes. See xTaskDelayUntil() for an alternative API function designed
|
|
|
++ * to facilitate fixed frequency execution. It does this by specifying an
|
|
|
++ * absolute time (rather than a relative time) at which the calling task should
|
|
|
++ * unblock.
|
|
|
++ *
|
|
|
++ * @param xTicksToDelay The amount of time, in tick periods, that
|
|
|
++ * the calling task should block.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ *
|
|
|
++ * void vTaskFunction( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * // Block for 500ms.
|
|
|
++ * const TickType_t xDelay = 500 / portTICK_PERIOD_MS;
|
|
|
++ *
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Simply toggle the LED every 500ms, blocking between each toggle.
|
|
|
++ * vToggleLED();
|
|
|
++ * vTaskDelay( xDelay );
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * \defgroup vTaskDelay vTaskDelay
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++void vTaskDelay( const TickType_t xTicksToDelay );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskDelayUntil( TickType_t *pxPreviousWakeTime, const TickType_t xTimeIncrement );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_xTaskDelayUntil must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Delay a task until a specified time. This function can be used by periodic
|
|
|
++ * tasks to ensure a constant execution frequency.
|
|
|
++ *
|
|
|
++ * This function differs from vTaskDelay () in one important aspect: vTaskDelay () will
|
|
|
++ * cause a task to block for the specified number of ticks from the time vTaskDelay () is
|
|
|
++ * called. It is therefore difficult to use vTaskDelay () by itself to generate a fixed
|
|
|
++ * execution frequency as the time between a task starting to execute and that task
|
|
|
++ * calling vTaskDelay () may not be fixed [the task may take a different path though the
|
|
|
++ * code between calls, or may get interrupted or preempted a different number of times
|
|
|
++ * each time it executes].
|
|
|
++ *
|
|
|
++ * Whereas vTaskDelay () specifies a wake time relative to the time at which the function
|
|
|
++ * is called, xTaskDelayUntil () specifies the absolute (exact) time at which it wishes to
|
|
|
++ * unblock.
|
|
|
++ *
|
|
|
++ * The macro pdMS_TO_TICKS() can be used to calculate the number of ticks from a
|
|
|
++ * time specified in milliseconds with a resolution of one tick period.
|
|
|
++ *
|
|
|
++ * @param pxPreviousWakeTime Pointer to a variable that holds the time at which the
|
|
|
++ * task was last unblocked. The variable must be initialised with the current time
|
|
|
++ * prior to its first use (see the example below). Following this the variable is
|
|
|
++ * automatically updated within xTaskDelayUntil ().
|
|
|
++ *
|
|
|
++ * @param xTimeIncrement The cycle time period. The task will be unblocked at
|
|
|
++ * time *pxPreviousWakeTime + xTimeIncrement. Calling xTaskDelayUntil with the
|
|
|
++ * same xTimeIncrement parameter value will cause the task to execute with
|
|
|
++ * a fixed interface period.
|
|
|
++ *
|
|
|
++ * @return Value which can be used to check whether the task was actually delayed.
|
|
|
++ * Will be pdTRUE if the task way delayed and pdFALSE otherwise. A task will not
|
|
|
++ * be delayed if the next expected wake time is in the past.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * // Perform an action every 10 ticks.
|
|
|
++ * void vTaskFunction( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * TickType_t xLastWakeTime;
|
|
|
++ * const TickType_t xFrequency = 10;
|
|
|
++ * BaseType_t xWasDelayed;
|
|
|
++ *
|
|
|
++ * // Initialise the xLastWakeTime variable with the current time.
|
|
|
++ * xLastWakeTime = xTaskGetTickCount ();
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Wait for the next cycle.
|
|
|
++ * xWasDelayed = xTaskDelayUntil( &xLastWakeTime, xFrequency );
|
|
|
++ *
|
|
|
++ * // Perform action here. xWasDelayed value can be used to determine
|
|
|
++ * // whether a deadline was missed if the code here took too long.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xTaskDelayUntil xTaskDelayUntil
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++BaseType_t xTaskDelayUntil( TickType_t * const pxPreviousWakeTime,
|
|
|
++ const TickType_t xTimeIncrement );
|
|
|
++
|
|
|
++/*
|
|
|
++ * vTaskDelayUntil() is the older version of xTaskDelayUntil() and does not
|
|
|
++ * return a value.
|
|
|
++ */
|
|
|
++#define vTaskDelayUntil( pxPreviousWakeTime, xTimeIncrement ) \
|
|
|
++ { \
|
|
|
++ ( void ) xTaskDelayUntil( pxPreviousWakeTime, xTimeIncrement ); \
|
|
|
++ }
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskAbortDelay( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_xTaskAbortDelay must be defined as 1 in FreeRTOSConfig.h for this
|
|
|
++ * function to be available.
|
|
|
++ *
|
|
|
++ * A task will enter the Blocked state when it is waiting for an event. The
|
|
|
++ * event it is waiting for can be a temporal event (waiting for a time), such
|
|
|
++ * as when vTaskDelay() is called, or an event on an object, such as when
|
|
|
++ * xQueueReceive() or ulTaskNotifyTake() is called. If the handle of a task
|
|
|
++ * that is in the Blocked state is used in a call to xTaskAbortDelay() then the
|
|
|
++ * task will leave the Blocked state, and return from whichever function call
|
|
|
++ * placed the task into the Blocked state.
|
|
|
++ *
|
|
|
++ * There is no 'FromISR' version of this function as an interrupt would need to
|
|
|
++ * know which object a task was blocked on in order to know which actions to
|
|
|
++ * take. For example, if the task was blocked on a queue the interrupt handler
|
|
|
++ * would then need to know if the queue was locked.
|
|
|
++ *
|
|
|
++ * @param xTask The handle of the task to remove from the Blocked state.
|
|
|
++ *
|
|
|
++ * @return If the task referenced by xTask was not in the Blocked state then
|
|
|
++ * pdFAIL is returned. Otherwise pdPASS is returned.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskAbortDelay xTaskAbortDelay
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++BaseType_t xTaskAbortDelay( TaskHandle_t xTask );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxTaskPriorityGet( const TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_uxTaskPriorityGet must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Obtain the priority of any task.
|
|
|
++ *
|
|
|
++ * @param xTask Handle of the task to be queried. Passing a NULL
|
|
|
++ * handle results in the priority of the calling task being returned.
|
|
|
++ *
|
|
|
++ * @return The priority of xTask.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vAFunction( void )
|
|
|
++ * {
|
|
|
++ * TaskHandle_t xHandle;
|
|
|
++ *
|
|
|
++ * // Create a task, storing the handle.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Use the handle to obtain the priority of the created task.
|
|
|
++ * // It was created with tskIDLE_PRIORITY, but may have changed
|
|
|
++ * // it itself.
|
|
|
++ * if( uxTaskPriorityGet( xHandle ) != tskIDLE_PRIORITY )
|
|
|
++ * {
|
|
|
++ * // The task has changed it's priority.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Is our priority higher than the created task?
|
|
|
++ * if( uxTaskPriorityGet( xHandle ) < uxTaskPriorityGet( NULL ) )
|
|
|
++ * {
|
|
|
++ * // Our priority (obtained using NULL handle) is higher.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup uxTaskPriorityGet uxTaskPriorityGet
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++UBaseType_t uxTaskPriorityGet( const TaskHandle_t xTask );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxTaskPriorityGetFromISR( const TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * A version of uxTaskPriorityGet() that can be used from an ISR.
|
|
|
++ */
|
|
|
++UBaseType_t uxTaskPriorityGetFromISR( const TaskHandle_t xTask );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * eTaskState eTaskGetState( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_eTaskGetState must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Obtain the state of any task. States are encoded by the eTaskState
|
|
|
++ * enumerated type.
|
|
|
++ *
|
|
|
++ * @param xTask Handle of the task to be queried.
|
|
|
++ *
|
|
|
++ * @return The state of xTask at the time the function was called. Note the
|
|
|
++ * state of the task might change between the function being called, and the
|
|
|
++ * functions return value being tested by the calling task.
|
|
|
++ */
|
|
|
++eTaskState eTaskGetState( TaskHandle_t xTask );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskPrioritySet( TaskHandle_t xTask, UBaseType_t uxNewPriority );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_vTaskPrioritySet must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Set the priority of any task.
|
|
|
++ *
|
|
|
++ * A context switch will occur before the function returns if the priority
|
|
|
++ * being set is higher than the currently executing task.
|
|
|
++ *
|
|
|
++ * @param xTask Handle to the task for which the priority is being set.
|
|
|
++ * Passing a NULL handle results in the priority of the calling task being set.
|
|
|
++ *
|
|
|
++ * @param uxNewPriority The priority to which the task will be set.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vAFunction( void )
|
|
|
++ * {
|
|
|
++ * TaskHandle_t xHandle;
|
|
|
++ *
|
|
|
++ * // Create a task, storing the handle.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Use the handle to raise the priority of the created task.
|
|
|
++ * vTaskPrioritySet( xHandle, tskIDLE_PRIORITY + 1 );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Use a NULL handle to raise our priority to the same value.
|
|
|
++ * vTaskPrioritySet( NULL, tskIDLE_PRIORITY + 1 );
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup vTaskPrioritySet vTaskPrioritySet
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++void vTaskPrioritySet( TaskHandle_t xTask,
|
|
|
++ UBaseType_t uxNewPriority );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskSuspend( TaskHandle_t xTaskToSuspend );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_vTaskSuspend must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Suspend any task. When suspended a task will never get any microcontroller
|
|
|
++ * processing time, no matter what its priority.
|
|
|
++ *
|
|
|
++ * Calls to vTaskSuspend are not accumulative -
|
|
|
++ * i.e. calling vTaskSuspend () twice on the same task still only requires one
|
|
|
++ * call to vTaskResume () to ready the suspended task.
|
|
|
++ *
|
|
|
++ * RT-Thread only supports suspending the current running thread.
|
|
|
++ * This function must be called with NULL as the parameter.
|
|
|
++ *
|
|
|
++ * @param xTaskToSuspend Handle to the task being suspended. Passing a NULL
|
|
|
++ * handle will cause the calling task to be suspended.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vAFunction( void )
|
|
|
++ * {
|
|
|
++ * TaskHandle_t xHandle;
|
|
|
++ *
|
|
|
++ * // Create a task, storing the handle.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Use the handle to suspend the created task.
|
|
|
++ * vTaskSuspend( xHandle );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // The created task will not run during this period, unless
|
|
|
++ * // another task calls vTaskResume( xHandle ).
|
|
|
++ *
|
|
|
++ * //...
|
|
|
++ *
|
|
|
++ *
|
|
|
++ * // Suspend ourselves.
|
|
|
++ * vTaskSuspend( NULL );
|
|
|
++ *
|
|
|
++ * // We cannot get here unless another task calls vTaskResume
|
|
|
++ * // with our handle as the parameter.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup vTaskSuspend vTaskSuspend
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++void vTaskSuspend( TaskHandle_t xTaskToSuspend );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskResume( TaskHandle_t xTaskToResume );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_vTaskSuspend must be defined as 1 for this function to be available.
|
|
|
++ * See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * Resumes a suspended task.
|
|
|
++ *
|
|
|
++ * A task that has been suspended by one or more calls to vTaskSuspend ()
|
|
|
++ * will be made available for running again by a single call to
|
|
|
++ * vTaskResume ().
|
|
|
++ *
|
|
|
++ * @param xTaskToResume Handle to the task being readied.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vAFunction( void )
|
|
|
++ * {
|
|
|
++ * TaskHandle_t xHandle;
|
|
|
++ *
|
|
|
++ * // Create a task, storing the handle.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Use the handle to suspend the created task.
|
|
|
++ * vTaskSuspend( xHandle );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // The created task will not run during this period, unless
|
|
|
++ * // another task calls vTaskResume( xHandle ).
|
|
|
++ *
|
|
|
++ * //...
|
|
|
++ *
|
|
|
++ *
|
|
|
++ * // Resume the suspended task ourselves.
|
|
|
++ * vTaskResume( xHandle );
|
|
|
++ *
|
|
|
++ * // The created task will once again get microcontroller processing
|
|
|
++ * // time in accordance with its priority within the system.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup vTaskResume vTaskResume
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++void vTaskResume( TaskHandle_t xTaskToResume );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void xTaskResumeFromISR( TaskHandle_t xTaskToResume );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_xTaskResumeFromISR must be defined as 1 for this function to be
|
|
|
++ * available. See the configuration section for more information.
|
|
|
++ *
|
|
|
++ * An implementation of vTaskResume() that can be called from within an ISR.
|
|
|
++ *
|
|
|
++ * A task that has been suspended by one or more calls to vTaskSuspend ()
|
|
|
++ * will be made available for running again by a single call to
|
|
|
++ * xTaskResumeFromISR ().
|
|
|
++ *
|
|
|
++ * xTaskResumeFromISR() should not be used to synchronise a task with an
|
|
|
++ * interrupt if there is a chance that the interrupt could arrive prior to the
|
|
|
++ * task being suspended - as this can lead to interrupts being missed. Use of a
|
|
|
++ * semaphore as a synchronisation mechanism would avoid this eventuality.
|
|
|
++ *
|
|
|
++ * @param xTaskToResume Handle to the task being readied.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if resuming the task should result in a context switch,
|
|
|
++ * otherwise pdFALSE. This is used by the ISR to determine if a context switch
|
|
|
++ * may be required following the ISR.
|
|
|
++ *
|
|
|
++ * \defgroup vTaskResumeFromISR vTaskResumeFromISR
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume );
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* SCHEDULER CONTROL
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskStartScheduler( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Starts the real time kernel tick processing. After calling the kernel
|
|
|
++ * has control over which tasks are executed and when.
|
|
|
++ *
|
|
|
++ * See the demo application file main.c for an example of creating
|
|
|
++ * tasks and starting the kernel.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vAFunction( void )
|
|
|
++ * {
|
|
|
++ * // Create at least one task before starting the kernel.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, NULL );
|
|
|
++ *
|
|
|
++ * // Start the real time kernel with preemption.
|
|
|
++ * vTaskStartScheduler ();
|
|
|
++ *
|
|
|
++ * // Will not get here unless a task calls vTaskEndScheduler ()
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * \defgroup vTaskStartScheduler vTaskStartScheduler
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++void vTaskStartScheduler( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskEndScheduler( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * NOTE: At the time of writing only the x86 real mode port, which runs on a PC
|
|
|
++ * in place of DOS, implements this function.
|
|
|
++ *
|
|
|
++ * Stops the real time kernel tick. All created tasks will be automatically
|
|
|
++ * deleted and multitasking (either preemptive or cooperative) will
|
|
|
++ * stop. Execution then resumes from the point where vTaskStartScheduler ()
|
|
|
++ * was called, as if vTaskStartScheduler () had just returned.
|
|
|
++ *
|
|
|
++ * See the demo application file main. c in the demo/PC directory for an
|
|
|
++ * example that uses vTaskEndScheduler ().
|
|
|
++ *
|
|
|
++ * vTaskEndScheduler () requires an exit function to be defined within the
|
|
|
++ * portable layer (see vPortEndScheduler () in port. c for the PC port). This
|
|
|
++ * performs hardware specific operations such as stopping the kernel tick.
|
|
|
++ *
|
|
|
++ * vTaskEndScheduler () will cause all of the resources allocated by the
|
|
|
++ * kernel to be freed - but will not free resources allocated by application
|
|
|
++ * tasks.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskCode( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Task code goes here.
|
|
|
++ *
|
|
|
++ * // At some point we want to end the real time kernel processing
|
|
|
++ * // so call ...
|
|
|
++ * vTaskEndScheduler ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * void vAFunction( void )
|
|
|
++ * {
|
|
|
++ * // Create at least one task before starting the kernel.
|
|
|
++ * xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, NULL );
|
|
|
++ *
|
|
|
++ * // Start the real time kernel with preemption.
|
|
|
++ * vTaskStartScheduler ();
|
|
|
++ *
|
|
|
++ * // Will only get here when the vTaskCode () task has called
|
|
|
++ * // vTaskEndScheduler (). When we get here we are back to single task
|
|
|
++ * // execution.
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * \defgroup vTaskEndScheduler vTaskEndScheduler
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++void vTaskEndScheduler( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskSuspendAll( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Suspends the scheduler without disabling interrupts. Context switches will
|
|
|
++ * not occur while the scheduler is suspended.
|
|
|
++ *
|
|
|
++ * After calling vTaskSuspendAll () the calling task will continue to execute
|
|
|
++ * without risk of being swapped out until a call to xTaskResumeAll () has been
|
|
|
++ * made.
|
|
|
++ *
|
|
|
++ * API functions that have the potential to cause a context switch (for example,
|
|
|
++ * xTaskDelayUntil(), xQueueSend(), etc.) must not be called while the scheduler
|
|
|
++ * is suspended.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vTask1( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Task code goes here.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // At some point the task wants to perform a long operation during
|
|
|
++ * // which it does not want to get swapped out. It cannot use
|
|
|
++ * // taskENTER_CRITICAL ()/taskEXIT_CRITICAL () as the length of the
|
|
|
++ * // operation may cause interrupts to be missed - including the
|
|
|
++ * // ticks.
|
|
|
++ *
|
|
|
++ * // Prevent the real time kernel swapping out the task.
|
|
|
++ * vTaskSuspendAll ();
|
|
|
++ *
|
|
|
++ * // Perform the operation here. There is no need to use critical
|
|
|
++ * // sections as we have all the microcontroller processing time.
|
|
|
++ * // During this time interrupts will still operate and the kernel
|
|
|
++ * // tick count will be maintained.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // The operation is complete. Restart the kernel.
|
|
|
++ * xTaskResumeAll ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup vTaskSuspendAll vTaskSuspendAll
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++void vTaskSuspendAll( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskResumeAll( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Resumes scheduler activity after it was suspended by a call to
|
|
|
++ * vTaskSuspendAll().
|
|
|
++ *
|
|
|
++ * xTaskResumeAll() only resumes the scheduler. It does not unsuspend tasks
|
|
|
++ * that were previously suspended by a call to vTaskSuspend().
|
|
|
++ *
|
|
|
++ * @return If resuming the scheduler caused a context switch then pdTRUE is
|
|
|
++ * returned, otherwise pdFALSE is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @code{c}
|
|
|
++ * void vTask1( void * pvParameters )
|
|
|
++ * {
|
|
|
++ * for( ;; )
|
|
|
++ * {
|
|
|
++ * // Task code goes here.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // At some point the task wants to perform a long operation during
|
|
|
++ * // which it does not want to get swapped out. It cannot use
|
|
|
++ * // taskENTER_CRITICAL ()/taskEXIT_CRITICAL () as the length of the
|
|
|
++ * // operation may cause interrupts to be missed - including the
|
|
|
++ * // ticks.
|
|
|
++ *
|
|
|
++ * // Prevent the real time kernel swapping out the task.
|
|
|
++ * vTaskSuspendAll ();
|
|
|
++ *
|
|
|
++ * // Perform the operation here. There is no need to use critical
|
|
|
++ * // sections as we have all the microcontroller processing time.
|
|
|
++ * // During this time interrupts will still operate and the real
|
|
|
++ * // time kernel tick count will be maintained.
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // The operation is complete. Restart the kernel. We want to force
|
|
|
++ * // a context switch - but there is no point if resuming the scheduler
|
|
|
++ * // caused a context switch already.
|
|
|
++ * if( !xTaskResumeAll () )
|
|
|
++ * {
|
|
|
++ * taskYIELD ();
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xTaskResumeAll xTaskResumeAll
|
|
|
++ * \ingroup SchedulerControl
|
|
|
++ */
|
|
|
++BaseType_t xTaskResumeAll( void );
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* TASK UTILITIES
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * TickType_t xTaskGetTickCount( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * @return The count of ticks since vTaskStartScheduler was called.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskGetTickCount xTaskGetTickCount
|
|
|
++ * \ingroup TaskUtils
|
|
|
++ */
|
|
|
++TickType_t xTaskGetTickCount( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * TickType_t xTaskGetTickCountFromISR( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * @return The count of ticks since vTaskStartScheduler was called.
|
|
|
++ *
|
|
|
++ * This is a version of xTaskGetTickCount() that is safe to be called from an
|
|
|
++ * ISR - provided that TickType_t is the natural word size of the
|
|
|
++ * microcontroller being used or interrupt nesting is either not supported or
|
|
|
++ * not being used.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskGetTickCountFromISR xTaskGetTickCountFromISR
|
|
|
++ * \ingroup TaskUtils
|
|
|
++ */
|
|
|
++TickType_t xTaskGetTickCountFromISR( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * uint16_t uxTaskGetNumberOfTasks( void );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * @return The number of tasks that the real time kernel is currently managing.
|
|
|
++ * This includes all ready, blocked and suspended tasks. A task that
|
|
|
++ * has been deleted but not yet freed by the idle task will also be
|
|
|
++ * included in the count.
|
|
|
++ *
|
|
|
++ * \defgroup uxTaskGetNumberOfTasks uxTaskGetNumberOfTasks
|
|
|
++ * \ingroup TaskUtils
|
|
|
++ */
|
|
|
++UBaseType_t uxTaskGetNumberOfTasks( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * char *pcTaskGetName( TaskHandle_t xTaskToQuery );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * @return The text (human readable) name of the task referenced by the handle
|
|
|
++ * xTaskToQuery. A task can query its own name by either passing in its own
|
|
|
++ * handle, or by setting xTaskToQuery to NULL.
|
|
|
++ *
|
|
|
++ * \defgroup pcTaskGetName pcTaskGetName
|
|
|
++ * \ingroup TaskUtils
|
|
|
++ */
|
|
|
++char * pcTaskGetName( TaskHandle_t xTaskToQuery ); /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * TaskHandle_t xTaskGetHandle( const char *pcNameToQuery );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * NOTE: This function takes a relatively long time to complete and should be
|
|
|
++ * used sparingly.
|
|
|
++ *
|
|
|
++ * @return The handle of the task that has the human readable name pcNameToQuery.
|
|
|
++ * NULL is returned if no matching name is found. INCLUDE_xTaskGetHandle
|
|
|
++ * must be set to 1 in FreeRTOSConfig.h for pcTaskGetHandle() to be available.
|
|
|
++ *
|
|
|
++ * \defgroup pcTaskGetHandle pcTaskGetHandle
|
|
|
++ * \ingroup TaskUtils
|
|
|
++ */
|
|
|
++TaskHandle_t xTaskGetHandle( const char * pcNameToQuery ); /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * UBaseType_t uxTaskGetStackHighWaterMark( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_uxTaskGetStackHighWaterMark must be set to 1 in FreeRTOSConfig.h for
|
|
|
++ * this function to be available.
|
|
|
++ *
|
|
|
++ * Returns the high water mark of the stack associated with xTask. That is,
|
|
|
++ * the minimum free stack space there has been (in words, so on a 32 bit machine
|
|
|
++ * a value of 1 means 4 bytes) since the task started. The smaller the returned
|
|
|
++ * number the closer the task has come to overflowing its stack.
|
|
|
++ *
|
|
|
++ * uxTaskGetStackHighWaterMark() and uxTaskGetStackHighWaterMark2() are the
|
|
|
++ * same except for their return type. Using configSTACK_DEPTH_TYPE allows the
|
|
|
++ * user to determine the return type. It gets around the problem of the value
|
|
|
++ * overflowing on 8-bit types without breaking backward compatibility for
|
|
|
++ * applications that expect an 8-bit return type.
|
|
|
++ *
|
|
|
++ * @param xTask Handle of the task associated with the stack to be checked.
|
|
|
++ * Set xTask to NULL to check the stack of the calling task.
|
|
|
++ *
|
|
|
++ * @return The smallest amount of free stack space there has been (in words, so
|
|
|
++ * actual spaces on the stack rather than bytes) since the task referenced by
|
|
|
++ * xTask was created.
|
|
|
++ */
|
|
|
++UBaseType_t uxTaskGetStackHighWaterMark( TaskHandle_t xTask );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * configSTACK_DEPTH_TYPE uxTaskGetStackHighWaterMark2( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * INCLUDE_uxTaskGetStackHighWaterMark2 must be set to 1 in FreeRTOSConfig.h for
|
|
|
++ * this function to be available.
|
|
|
++ *
|
|
|
++ * Returns the high water mark of the stack associated with xTask. That is,
|
|
|
++ * the minimum free stack space there has been (in words, so on a 32 bit machine
|
|
|
++ * a value of 1 means 4 bytes) since the task started. The smaller the returned
|
|
|
++ * number the closer the task has come to overflowing its stack.
|
|
|
++ *
|
|
|
++ * uxTaskGetStackHighWaterMark() and uxTaskGetStackHighWaterMark2() are the
|
|
|
++ * same except for their return type. Using configSTACK_DEPTH_TYPE allows the
|
|
|
++ * user to determine the return type. It gets around the problem of the value
|
|
|
++ * overflowing on 8-bit types without breaking backward compatibility for
|
|
|
++ * applications that expect an 8-bit return type.
|
|
|
++ *
|
|
|
++ * @param xTask Handle of the task associated with the stack to be checked.
|
|
|
++ * Set xTask to NULL to check the stack of the calling task.
|
|
|
++ *
|
|
|
++ * @return The smallest amount of free stack space there has been (in words, so
|
|
|
++ * actual spaces on the stack rather than bytes) since the task referenced by
|
|
|
++ * xTask was created.
|
|
|
++ */
|
|
|
++configSTACK_DEPTH_TYPE uxTaskGetStackHighWaterMark2( TaskHandle_t xTask );
|
|
|
++
|
|
|
++/* When using trace macros it is sometimes necessary to include task.h before
|
|
|
++ * FreeRTOS.h. When this is done TaskHookFunction_t will not yet have been defined,
|
|
|
++ * so the following two prototypes will cause a compilation error. This can be
|
|
|
++ * fixed by simply guarding against the inclusion of these two prototypes unless
|
|
|
++ * they are explicitly required by the configUSE_APPLICATION_TASK_TAG configuration
|
|
|
++ * constant. */
|
|
|
++#ifdef configUSE_APPLICATION_TASK_TAG
|
|
|
++ #if configUSE_APPLICATION_TASK_TAG == 1
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskSetApplicationTaskTag( TaskHandle_t xTask, TaskHookFunction_t pxHookFunction );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Sets pxHookFunction to be the task hook function used by the task xTask.
|
|
|
++ * Passing xTask as NULL has the effect of setting the calling tasks hook
|
|
|
++ * function.
|
|
|
++ */
|
|
|
++ void vTaskSetApplicationTaskTag( TaskHandle_t xTask,
|
|
|
++ TaskHookFunction_t pxHookFunction );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * void xTaskGetApplicationTaskTag( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Returns the pxHookFunction value assigned to the task xTask. Do not
|
|
|
++ * call from an interrupt service routine - call
|
|
|
++ * xTaskGetApplicationTaskTagFromISR() instead.
|
|
|
++ */
|
|
|
++ TaskHookFunction_t xTaskGetApplicationTaskTag( TaskHandle_t xTask );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * void xTaskGetApplicationTaskTagFromISR( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Returns the pxHookFunction value assigned to the task xTask. Can
|
|
|
++ * be called from an interrupt service routine.
|
|
|
++ */
|
|
|
++ TaskHookFunction_t xTaskGetApplicationTaskTagFromISR( TaskHandle_t xTask );
|
|
|
++ #endif /* configUSE_APPLICATION_TASK_TAG ==1 */
|
|
|
++#endif /* ifdef configUSE_APPLICATION_TASK_TAG */
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskCallApplicationTaskHook( TaskHandle_t xTask, void *pvParameter );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Calls the hook function associated with xTask. Passing xTask as NULL has
|
|
|
++ * the effect of calling the Running tasks (the calling task) hook function.
|
|
|
++ *
|
|
|
++ * pvParameter is passed to the hook function for the task to interpret as it
|
|
|
++ * wants. The return value is the value returned by the task hook function
|
|
|
++ * registered by the user.
|
|
|
++ */
|
|
|
++BaseType_t xTaskCallApplicationTaskHook( TaskHandle_t xTask,
|
|
|
++ void * pvParameter );
|
|
|
++
|
|
|
++/**
|
|
|
++ * xTaskGetIdleTaskHandle() is only available if
|
|
|
++ * INCLUDE_xTaskGetIdleTaskHandle is set to 1 in FreeRTOSConfig.h.
|
|
|
++ *
|
|
|
++ * Simply returns the handle of the idle task. It is not valid to call
|
|
|
++ * xTaskGetIdleTaskHandle() before the scheduler has been started.
|
|
|
++ */
|
|
|
++TaskHandle_t xTaskGetIdleTaskHandle( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyIndexed( TaskHandle_t xTaskToNotify, UBaseType_t uxIndexToNotify, uint32_t ulValue, eNotifyAction eAction );
|
|
|
++ * BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for these
|
|
|
++ * functions to be available.
|
|
|
++ *
|
|
|
++ * Sends a direct to task notification to a task, with an optional value and
|
|
|
++ * action.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * Events can be sent to a task using an intermediary object. Examples of such
|
|
|
++ * objects are queues, semaphores, mutexes and event groups. Task notifications
|
|
|
++ * are a method of sending an event directly to a task without the need for such
|
|
|
++ * an intermediary object.
|
|
|
++ *
|
|
|
++ * A notification sent to a task can optionally perform an action, such as
|
|
|
++ * update, overwrite or increment one of the task's notification values. In
|
|
|
++ * that way task notifications can be used to send data to a task, or be used as
|
|
|
++ * light weight and fast binary or counting semaphores.
|
|
|
++ *
|
|
|
++ * A task can use xTaskNotifyWaitIndexed() or ulTaskNotifyTakeIndexed() to
|
|
|
++ * [optionally] block to wait for a notification to be pending. The task does
|
|
|
++ * not consume any CPU time while it is in the Blocked state.
|
|
|
++ *
|
|
|
++ * A notification sent to a task will remain pending until it is cleared by the
|
|
|
++ * task calling xTaskNotifyWaitIndexed() or ulTaskNotifyTakeIndexed() (or their
|
|
|
++ * un-indexed equivalents). If the task was already in the Blocked state to
|
|
|
++ * wait for a notification when the notification arrives then the task will
|
|
|
++ * automatically be removed from the Blocked state (unblocked) and the
|
|
|
++ * notification cleared.
|
|
|
++ *
|
|
|
++ * **NOTE** Each notification within the array operates independently - a task
|
|
|
++ * can only block on one notification within the array at a time and will not be
|
|
|
++ * unblocked by a notification sent to any other array index.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. xTaskNotify() is the original API function, and remains backward
|
|
|
++ * compatible by always operating on the notification value at index 0 in the
|
|
|
++ * array. Calling xTaskNotify() is equivalent to calling xTaskNotifyIndexed()
|
|
|
++ * with the uxIndexToNotify parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param xTaskToNotify The handle of the task being notified. The handle to a
|
|
|
++ * task can be returned from the xTaskCreate() API function used to create the
|
|
|
++ * task, and the handle of the currently running task can be obtained by calling
|
|
|
++ * xTaskGetCurrentTaskHandle().
|
|
|
++ *
|
|
|
++ * @param uxIndexToNotify The index within the target task's array of
|
|
|
++ * notification values to which the notification is to be sent. uxIndexToNotify
|
|
|
++ * must be less than configTASK_NOTIFICATION_ARRAY_ENTRIES. xTaskNotify() does
|
|
|
++ * not have this parameter and always sends notifications to index 0.
|
|
|
++ *
|
|
|
++ * @param ulValue Data that can be sent with the notification. How the data is
|
|
|
++ * used depends on the value of the eAction parameter.
|
|
|
++ *
|
|
|
++ * @param eAction Specifies how the notification updates the task's notification
|
|
|
++ * value, if at all. Valid values for eAction are as follows:
|
|
|
++ *
|
|
|
++ * eSetBits -
|
|
|
++ * The target notification value is bitwise ORed with ulValue.
|
|
|
++ * xTaskNotifyIndexed() always returns pdPASS in this case.
|
|
|
++ *
|
|
|
++ * eIncrement -
|
|
|
++ * The target notification value is incremented. ulValue is not used and
|
|
|
++ * xTaskNotifyIndexed() always returns pdPASS in this case.
|
|
|
++ *
|
|
|
++ * eSetValueWithOverwrite -
|
|
|
++ * The target notification value is set to the value of ulValue, even if the
|
|
|
++ * task being notified had not yet processed the previous notification at the
|
|
|
++ * same array index (the task already had a notification pending at that index).
|
|
|
++ * xTaskNotifyIndexed() always returns pdPASS in this case.
|
|
|
++ *
|
|
|
++ * eSetValueWithoutOverwrite -
|
|
|
++ * If the task being notified did not already have a notification pending at the
|
|
|
++ * same array index then the target notification value is set to ulValue and
|
|
|
++ * xTaskNotifyIndexed() will return pdPASS. If the task being notified already
|
|
|
++ * had a notification pending at the same array index then no action is
|
|
|
++ * performed and pdFAIL is returned.
|
|
|
++ *
|
|
|
++ * eNoAction -
|
|
|
++ * The task receives a notification at the specified array index without the
|
|
|
++ * notification value at that index being updated. ulValue is not used and
|
|
|
++ * xTaskNotifyIndexed() always returns pdPASS in this case.
|
|
|
++ *
|
|
|
++ * pulPreviousNotificationValue -
|
|
|
++ * Can be used to pass out the subject task's notification value before any
|
|
|
++ * bits are modified by the notify function.
|
|
|
++ *
|
|
|
++ * @return Dependent on the value of eAction. See the description of the
|
|
|
++ * eAction parameter.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyIndexed xTaskNotifyIndexed
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++BaseType_t xTaskGenericNotify( TaskHandle_t xTaskToNotify,
|
|
|
++ UBaseType_t uxIndexToNotify,
|
|
|
++ uint32_t ulValue,
|
|
|
++ eNotifyAction eAction,
|
|
|
++ uint32_t * pulPreviousNotificationValue );
|
|
|
++#define xTaskNotify( xTaskToNotify, ulValue, eAction ) \
|
|
|
++ xTaskGenericNotify( ( xTaskToNotify ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( ulValue ), ( eAction ), NULL )
|
|
|
++#define xTaskNotifyIndexed( xTaskToNotify, uxIndexToNotify, ulValue, eAction ) \
|
|
|
++ xTaskGenericNotify( ( xTaskToNotify ), ( uxIndexToNotify ), ( ulValue ), ( eAction ), NULL )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyAndQueryIndexed( TaskHandle_t xTaskToNotify, UBaseType_t uxIndexToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotifyValue );
|
|
|
++ * BaseType_t xTaskNotifyAndQuery( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotifyValue );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * xTaskNotifyAndQueryIndexed() performs the same operation as
|
|
|
++ * xTaskNotifyIndexed() with the addition that it also returns the subject
|
|
|
++ * task's prior notification value (the notification value at the time the
|
|
|
++ * function is called rather than when the function returns) in the additional
|
|
|
++ * pulPreviousNotifyValue parameter.
|
|
|
++ *
|
|
|
++ * xTaskNotifyAndQuery() performs the same operation as xTaskNotify() with the
|
|
|
++ * addition that it also returns the subject task's prior notification value
|
|
|
++ * (the notification value as it was at the time the function is called, rather
|
|
|
++ * than when the function returns) in the additional pulPreviousNotifyValue
|
|
|
++ * parameter.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyAndQueryIndexed xTaskNotifyAndQueryIndexed
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++#define xTaskNotifyAndQuery( xTaskToNotify, ulValue, eAction, pulPreviousNotifyValue ) \
|
|
|
++ xTaskGenericNotify( ( xTaskToNotify ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( ulValue ), ( eAction ), ( pulPreviousNotifyValue ) )
|
|
|
++#define xTaskNotifyAndQueryIndexed( xTaskToNotify, uxIndexToNotify, ulValue, eAction, pulPreviousNotifyValue ) \
|
|
|
++ xTaskGenericNotify( ( xTaskToNotify ), ( uxIndexToNotify ), ( ulValue ), ( eAction ), ( pulPreviousNotifyValue ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyIndexedFromISR( TaskHandle_t xTaskToNotify, UBaseType_t uxIndexToNotify, uint32_t ulValue, eNotifyAction eAction, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for these
|
|
|
++ * functions to be available.
|
|
|
++ *
|
|
|
++ * A version of xTaskNotifyIndexed() that can be used from an interrupt service
|
|
|
++ * routine (ISR).
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * Events can be sent to a task using an intermediary object. Examples of such
|
|
|
++ * objects are queues, semaphores, mutexes and event groups. Task notifications
|
|
|
++ * are a method of sending an event directly to a task without the need for such
|
|
|
++ * an intermediary object.
|
|
|
++ *
|
|
|
++ * A notification sent to a task can optionally perform an action, such as
|
|
|
++ * update, overwrite or increment one of the task's notification values. In
|
|
|
++ * that way task notifications can be used to send data to a task, or be used as
|
|
|
++ * light weight and fast binary or counting semaphores.
|
|
|
++ *
|
|
|
++ * A task can use xTaskNotifyWaitIndexed() to [optionally] block to wait for a
|
|
|
++ * notification to be pending, or ulTaskNotifyTakeIndexed() to [optionally] block
|
|
|
++ * to wait for a notification value to have a non-zero value. The task does
|
|
|
++ * not consume any CPU time while it is in the Blocked state.
|
|
|
++ *
|
|
|
++ * A notification sent to a task will remain pending until it is cleared by the
|
|
|
++ * task calling xTaskNotifyWaitIndexed() or ulTaskNotifyTakeIndexed() (or their
|
|
|
++ * un-indexed equivalents). If the task was already in the Blocked state to
|
|
|
++ * wait for a notification when the notification arrives then the task will
|
|
|
++ * automatically be removed from the Blocked state (unblocked) and the
|
|
|
++ * notification cleared.
|
|
|
++ *
|
|
|
++ * **NOTE** Each notification within the array operates independently - a task
|
|
|
++ * can only block on one notification within the array at a time and will not be
|
|
|
++ * unblocked by a notification sent to any other array index.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. xTaskNotifyFromISR() is the original API function, and remains
|
|
|
++ * backward compatible by always operating on the notification value at index 0
|
|
|
++ * within the array. Calling xTaskNotifyFromISR() is equivalent to calling
|
|
|
++ * xTaskNotifyIndexedFromISR() with the uxIndexToNotify parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param uxIndexToNotify The index within the target task's array of
|
|
|
++ * notification values to which the notification is to be sent. uxIndexToNotify
|
|
|
++ * must be less than configTASK_NOTIFICATION_ARRAY_ENTRIES. xTaskNotifyFromISR()
|
|
|
++ * does not have this parameter and always sends notifications to index 0.
|
|
|
++ *
|
|
|
++ * @param xTaskToNotify The handle of the task being notified. The handle to a
|
|
|
++ * task can be returned from the xTaskCreate() API function used to create the
|
|
|
++ * task, and the handle of the currently running task can be obtained by calling
|
|
|
++ * xTaskGetCurrentTaskHandle().
|
|
|
++ *
|
|
|
++ * @param ulValue Data that can be sent with the notification. How the data is
|
|
|
++ * used depends on the value of the eAction parameter.
|
|
|
++ *
|
|
|
++ * @param eAction Specifies how the notification updates the task's notification
|
|
|
++ * value, if at all. Valid values for eAction are as follows:
|
|
|
++ *
|
|
|
++ * eSetBits -
|
|
|
++ * The task's notification value is bitwise ORed with ulValue. xTaskNotify()
|
|
|
++ * always returns pdPASS in this case.
|
|
|
++ *
|
|
|
++ * eIncrement -
|
|
|
++ * The task's notification value is incremented. ulValue is not used and
|
|
|
++ * xTaskNotify() always returns pdPASS in this case.
|
|
|
++ *
|
|
|
++ * eSetValueWithOverwrite -
|
|
|
++ * The task's notification value is set to the value of ulValue, even if the
|
|
|
++ * task being notified had not yet processed the previous notification (the
|
|
|
++ * task already had a notification pending). xTaskNotify() always returns
|
|
|
++ * pdPASS in this case.
|
|
|
++ *
|
|
|
++ * eSetValueWithoutOverwrite -
|
|
|
++ * If the task being notified did not already have a notification pending then
|
|
|
++ * the task's notification value is set to ulValue and xTaskNotify() will
|
|
|
++ * return pdPASS. If the task being notified already had a notification
|
|
|
++ * pending then no action is performed and pdFAIL is returned.
|
|
|
++ *
|
|
|
++ * eNoAction -
|
|
|
++ * The task receives a notification without its notification value being
|
|
|
++ * updated. ulValue is not used and xTaskNotify() always returns pdPASS in
|
|
|
++ * this case.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken xTaskNotifyFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if sending the notification caused the
|
|
|
++ * task to which the notification was sent to leave the Blocked state, and the
|
|
|
++ * unblocked task has a priority higher than the currently running task. If
|
|
|
++ * xTaskNotifyFromISR() sets this value to pdTRUE then a context switch should
|
|
|
++ * be requested before the interrupt is exited. How a context switch is
|
|
|
++ * requested from an ISR is dependent on the port - see the documentation page
|
|
|
++ * for the port in use.
|
|
|
++ *
|
|
|
++ * @return Dependent on the value of eAction. See the description of the
|
|
|
++ * eAction parameter.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyIndexedFromISR xTaskNotifyIndexedFromISR
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++BaseType_t xTaskGenericNotifyFromISR( TaskHandle_t xTaskToNotify,
|
|
|
++ UBaseType_t uxIndexToNotify,
|
|
|
++ uint32_t ulValue,
|
|
|
++ eNotifyAction eAction,
|
|
|
++ uint32_t * pulPreviousNotificationValue,
|
|
|
++ BaseType_t * pxHigherPriorityTaskWoken );
|
|
|
++#define xTaskNotifyFromISR( xTaskToNotify, ulValue, eAction, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTaskGenericNotifyFromISR( ( xTaskToNotify ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( ulValue ), ( eAction ), NULL, ( pxHigherPriorityTaskWoken ) )
|
|
|
++#define xTaskNotifyIndexedFromISR( xTaskToNotify, uxIndexToNotify, ulValue, eAction, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTaskGenericNotifyFromISR( ( xTaskToNotify ), ( uxIndexToNotify ), ( ulValue ), ( eAction ), NULL, ( pxHigherPriorityTaskWoken ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyAndQueryIndexedFromISR( TaskHandle_t xTaskToNotify, UBaseType_t uxIndexToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotificationValue, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * BaseType_t xTaskNotifyAndQueryFromISR( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotificationValue, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * xTaskNotifyAndQueryIndexedFromISR() performs the same operation as
|
|
|
++ * xTaskNotifyIndexedFromISR() with the addition that it also returns the
|
|
|
++ * subject task's prior notification value (the notification value at the time
|
|
|
++ * the function is called rather than at the time the function returns) in the
|
|
|
++ * additional pulPreviousNotifyValue parameter.
|
|
|
++ *
|
|
|
++ * xTaskNotifyAndQueryFromISR() performs the same operation as
|
|
|
++ * xTaskNotifyFromISR() with the addition that it also returns the subject
|
|
|
++ * task's prior notification value (the notification value at the time the
|
|
|
++ * function is called rather than at the time the function returns) in the
|
|
|
++ * additional pulPreviousNotifyValue parameter.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyAndQueryIndexedFromISR xTaskNotifyAndQueryIndexedFromISR
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++#define xTaskNotifyAndQueryIndexedFromISR( xTaskToNotify, uxIndexToNotify, ulValue, eAction, pulPreviousNotificationValue, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTaskGenericNotifyFromISR( ( xTaskToNotify ), ( uxIndexToNotify ), ( ulValue ), ( eAction ), ( pulPreviousNotificationValue ), ( pxHigherPriorityTaskWoken ) )
|
|
|
++#define xTaskNotifyAndQueryFromISR( xTaskToNotify, ulValue, eAction, pulPreviousNotificationValue, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTaskGenericNotifyFromISR( ( xTaskToNotify ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( ulValue ), ( eAction ), ( pulPreviousNotificationValue ), ( pxHigherPriorityTaskWoken ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyWaitIndexed( UBaseType_t uxIndexToWaitOn, uint32_t ulBitsToClearOnEntry, uint32_t ulBitsToClearOnExit, uint32_t *pulNotificationValue, TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry, uint32_t ulBitsToClearOnExit, uint32_t *pulNotificationValue, TickType_t xTicksToWait );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Waits for a direct to task notification to be pending at a given index within
|
|
|
++ * an array of direct to task notifications.
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for this
|
|
|
++ * function to be available.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * Events can be sent to a task using an intermediary object. Examples of such
|
|
|
++ * objects are queues, semaphores, mutexes and event groups. Task notifications
|
|
|
++ * are a method of sending an event directly to a task without the need for such
|
|
|
++ * an intermediary object.
|
|
|
++ *
|
|
|
++ * A notification sent to a task can optionally perform an action, such as
|
|
|
++ * update, overwrite or increment one of the task's notification values. In
|
|
|
++ * that way task notifications can be used to send data to a task, or be used as
|
|
|
++ * light weight and fast binary or counting semaphores.
|
|
|
++ *
|
|
|
++ * A notification sent to a task will remain pending until it is cleared by the
|
|
|
++ * task calling xTaskNotifyWaitIndexed() or ulTaskNotifyTakeIndexed() (or their
|
|
|
++ * un-indexed equivalents). If the task was already in the Blocked state to
|
|
|
++ * wait for a notification when the notification arrives then the task will
|
|
|
++ * automatically be removed from the Blocked state (unblocked) and the
|
|
|
++ * notification cleared.
|
|
|
++ *
|
|
|
++ * A task can use xTaskNotifyWaitIndexed() to [optionally] block to wait for a
|
|
|
++ * notification to be pending, or ulTaskNotifyTakeIndexed() to [optionally] block
|
|
|
++ * to wait for a notification value to have a non-zero value. The task does
|
|
|
++ * not consume any CPU time while it is in the Blocked state.
|
|
|
++ *
|
|
|
++ * **NOTE** Each notification within the array operates independently - a task
|
|
|
++ * can only block on one notification within the array at a time and will not be
|
|
|
++ * unblocked by a notification sent to any other array index.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. xTaskNotifyWait() is the original API function, and remains backward
|
|
|
++ * compatible by always operating on the notification value at index 0 in the
|
|
|
++ * array. Calling xTaskNotifyWait() is equivalent to calling
|
|
|
++ * xTaskNotifyWaitIndexed() with the uxIndexToWaitOn parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param uxIndexToWaitOn The index within the calling task's array of
|
|
|
++ * notification values on which the calling task will wait for a notification to
|
|
|
++ * be received. uxIndexToWaitOn must be less than
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES. xTaskNotifyWait() does
|
|
|
++ * not have this parameter and always waits for notifications on index 0.
|
|
|
++ *
|
|
|
++ * @param ulBitsToClearOnEntry Bits that are set in ulBitsToClearOnEntry value
|
|
|
++ * will be cleared in the calling task's notification value before the task
|
|
|
++ * checks to see if any notifications are pending, and optionally blocks if no
|
|
|
++ * notifications are pending. Setting ulBitsToClearOnEntry to ULONG_MAX (if
|
|
|
++ * limits.h is included) or 0xffffffffUL (if limits.h is not included) will have
|
|
|
++ * the effect of resetting the task's notification value to 0. Setting
|
|
|
++ * ulBitsToClearOnEntry to 0 will leave the task's notification value unchanged.
|
|
|
++ *
|
|
|
++ * @param ulBitsToClearOnExit If a notification is pending or received before
|
|
|
++ * the calling task exits the xTaskNotifyWait() function then the task's
|
|
|
++ * notification value (see the xTaskNotify() API function) is passed out using
|
|
|
++ * the pulNotificationValue parameter. Then any bits that are set in
|
|
|
++ * ulBitsToClearOnExit will be cleared in the task's notification value (note
|
|
|
++ * *pulNotificationValue is set before any bits are cleared). Setting
|
|
|
++ * ulBitsToClearOnExit to ULONG_MAX (if limits.h is included) or 0xffffffffUL
|
|
|
++ * (if limits.h is not included) will have the effect of resetting the task's
|
|
|
++ * notification value to 0 before the function exits. Setting
|
|
|
++ * ulBitsToClearOnExit to 0 will leave the task's notification value unchanged
|
|
|
++ * when the function exits (in which case the value passed out in
|
|
|
++ * pulNotificationValue will match the task's notification value).
|
|
|
++ *
|
|
|
++ * @param pulNotificationValue Used to pass the task's notification value out
|
|
|
++ * of the function. Note the value passed out will not be effected by the
|
|
|
++ * clearing of any bits caused by ulBitsToClearOnExit being non-zero.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time that the task should wait in
|
|
|
++ * the Blocked state for a notification to be received, should a notification
|
|
|
++ * not already be pending when xTaskNotifyWait() was called. The task
|
|
|
++ * will not consume any processing time while it is in the Blocked state. This
|
|
|
++ * is specified in kernel ticks, the macro pdMS_TO_TICKS( value_in_ms ) can be
|
|
|
++ * used to convert a time specified in milliseconds to a time specified in
|
|
|
++ * ticks.
|
|
|
++ *
|
|
|
++ * @return If a notification was received (including notifications that were
|
|
|
++ * already pending when xTaskNotifyWait was called) then pdPASS is
|
|
|
++ * returned. Otherwise pdFAIL is returned.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyWaitIndexed xTaskNotifyWaitIndexed
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++BaseType_t xTaskGenericNotifyWait( UBaseType_t uxIndexToWaitOn,
|
|
|
++ uint32_t ulBitsToClearOnEntry,
|
|
|
++ uint32_t ulBitsToClearOnExit,
|
|
|
++ uint32_t * pulNotificationValue,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++#define xTaskNotifyWait( ulBitsToClearOnEntry, ulBitsToClearOnExit, pulNotificationValue, xTicksToWait ) \
|
|
|
++ xTaskGenericNotifyWait( tskDEFAULT_INDEX_TO_NOTIFY, ( ulBitsToClearOnEntry ), ( ulBitsToClearOnExit ), ( pulNotificationValue ), ( xTicksToWait ) )
|
|
|
++#define xTaskNotifyWaitIndexed( uxIndexToWaitOn, ulBitsToClearOnEntry, ulBitsToClearOnExit, pulNotificationValue, xTicksToWait ) \
|
|
|
++ xTaskGenericNotifyWait( ( uxIndexToWaitOn ), ( ulBitsToClearOnEntry ), ( ulBitsToClearOnExit ), ( pulNotificationValue ), ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyGiveIndexed( TaskHandle_t xTaskToNotify, UBaseType_t uxIndexToNotify );
|
|
|
++ * BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Sends a direct to task notification to a particular index in the target
|
|
|
++ * task's notification array in a manner similar to giving a counting semaphore.
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for more details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for these
|
|
|
++ * macros to be available.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * Events can be sent to a task using an intermediary object. Examples of such
|
|
|
++ * objects are queues, semaphores, mutexes and event groups. Task notifications
|
|
|
++ * are a method of sending an event directly to a task without the need for such
|
|
|
++ * an intermediary object.
|
|
|
++ *
|
|
|
++ * A notification sent to a task can optionally perform an action, such as
|
|
|
++ * update, overwrite or increment one of the task's notification values. In
|
|
|
++ * that way task notifications can be used to send data to a task, or be used as
|
|
|
++ * light weight and fast binary or counting semaphores.
|
|
|
++ *
|
|
|
++ * xTaskNotifyGiveIndexed() is a helper macro intended for use when task
|
|
|
++ * notifications are used as light weight and faster binary or counting
|
|
|
++ * semaphore equivalents. Actual FreeRTOS semaphores are given using the
|
|
|
++ * xSemaphoreGive() API function, the equivalent action that instead uses a task
|
|
|
++ * notification is xTaskNotifyGiveIndexed().
|
|
|
++ *
|
|
|
++ * When task notifications are being used as a binary or counting semaphore
|
|
|
++ * equivalent then the task being notified should wait for the notification
|
|
|
++ * using the ulTaskNotificationTakeIndexed() API function rather than the
|
|
|
++ * xTaskNotifyWaitIndexed() API function.
|
|
|
++ *
|
|
|
++ * **NOTE** Each notification within the array operates independently - a task
|
|
|
++ * can only block on one notification within the array at a time and will not be
|
|
|
++ * unblocked by a notification sent to any other array index.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. xTaskNotifyGive() is the original API function, and remains backward
|
|
|
++ * compatible by always operating on the notification value at index 0 in the
|
|
|
++ * array. Calling xTaskNotifyGive() is equivalent to calling
|
|
|
++ * xTaskNotifyGiveIndexed() with the uxIndexToNotify parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param xTaskToNotify The handle of the task being notified. The handle to a
|
|
|
++ * task can be returned from the xTaskCreate() API function used to create the
|
|
|
++ * task, and the handle of the currently running task can be obtained by calling
|
|
|
++ * xTaskGetCurrentTaskHandle().
|
|
|
++ *
|
|
|
++ * @param uxIndexToNotify The index within the target task's array of
|
|
|
++ * notification values to which the notification is to be sent. uxIndexToNotify
|
|
|
++ * must be less than configTASK_NOTIFICATION_ARRAY_ENTRIES. xTaskNotifyGive()
|
|
|
++ * does not have this parameter and always sends notifications to index 0.
|
|
|
++ *
|
|
|
++ * @return xTaskNotifyGive() is a macro that calls xTaskNotify() with the
|
|
|
++ * eAction parameter set to eIncrement - so pdPASS is always returned.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyGiveIndexed xTaskNotifyGiveIndexed
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++#define xTaskNotifyGive( xTaskToNotify ) \
|
|
|
++ xTaskGenericNotify( ( xTaskToNotify ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( 0 ), eIncrement, NULL )
|
|
|
++#define xTaskNotifyGiveIndexed( xTaskToNotify, uxIndexToNotify ) \
|
|
|
++ xTaskGenericNotify( ( xTaskToNotify ), ( uxIndexToNotify ), ( 0 ), eIncrement, NULL )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskNotifyGiveIndexedFromISR( TaskHandle_t xTaskHandle, UBaseType_t uxIndexToNotify, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * void vTaskNotifyGiveFromISR( TaskHandle_t xTaskHandle, BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * A version of xTaskNotifyGiveIndexed() that can be called from an interrupt
|
|
|
++ * service routine (ISR).
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for more details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for this macro
|
|
|
++ * to be available.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * Events can be sent to a task using an intermediary object. Examples of such
|
|
|
++ * objects are queues, semaphores, mutexes and event groups. Task notifications
|
|
|
++ * are a method of sending an event directly to a task without the need for such
|
|
|
++ * an intermediary object.
|
|
|
++ *
|
|
|
++ * A notification sent to a task can optionally perform an action, such as
|
|
|
++ * update, overwrite or increment one of the task's notification values. In
|
|
|
++ * that way task notifications can be used to send data to a task, or be used as
|
|
|
++ * light weight and fast binary or counting semaphores.
|
|
|
++ *
|
|
|
++ * vTaskNotifyGiveIndexedFromISR() is intended for use when task notifications
|
|
|
++ * are used as light weight and faster binary or counting semaphore equivalents.
|
|
|
++ * Actual FreeRTOS semaphores are given from an ISR using the
|
|
|
++ * xSemaphoreGiveFromISR() API function, the equivalent action that instead uses
|
|
|
++ * a task notification is vTaskNotifyGiveIndexedFromISR().
|
|
|
++ *
|
|
|
++ * When task notifications are being used as a binary or counting semaphore
|
|
|
++ * equivalent then the task being notified should wait for the notification
|
|
|
++ * using the ulTaskNotificationTakeIndexed() API function rather than the
|
|
|
++ * xTaskNotifyWaitIndexed() API function.
|
|
|
++ *
|
|
|
++ * **NOTE** Each notification within the array operates independently - a task
|
|
|
++ * can only block on one notification within the array at a time and will not be
|
|
|
++ * unblocked by a notification sent to any other array index.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. xTaskNotifyFromISR() is the original API function, and remains
|
|
|
++ * backward compatible by always operating on the notification value at index 0
|
|
|
++ * within the array. Calling xTaskNotifyGiveFromISR() is equivalent to calling
|
|
|
++ * xTaskNotifyGiveIndexedFromISR() with the uxIndexToNotify parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param xTaskToNotify The handle of the task being notified. The handle to a
|
|
|
++ * task can be returned from the xTaskCreate() API function used to create the
|
|
|
++ * task, and the handle of the currently running task can be obtained by calling
|
|
|
++ * xTaskGetCurrentTaskHandle().
|
|
|
++ *
|
|
|
++ * @param uxIndexToNotify The index within the target task's array of
|
|
|
++ * notification values to which the notification is to be sent. uxIndexToNotify
|
|
|
++ * must be less than configTASK_NOTIFICATION_ARRAY_ENTRIES.
|
|
|
++ * xTaskNotifyGiveFromISR() does not have this parameter and always sends
|
|
|
++ * notifications to index 0.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken vTaskNotifyGiveFromISR() will set
|
|
|
++ * *pxHigherPriorityTaskWoken to pdTRUE if sending the notification caused the
|
|
|
++ * task to which the notification was sent to leave the Blocked state, and the
|
|
|
++ * unblocked task has a priority higher than the currently running task. If
|
|
|
++ * vTaskNotifyGiveFromISR() sets this value to pdTRUE then a context switch
|
|
|
++ * should be requested before the interrupt is exited. How a context switch is
|
|
|
++ * requested from an ISR is dependent on the port - see the documentation page
|
|
|
++ * for the port in use.
|
|
|
++ *
|
|
|
++ * \defgroup vTaskNotifyGiveIndexedFromISR vTaskNotifyGiveIndexedFromISR
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++void vTaskGenericNotifyGiveFromISR( TaskHandle_t xTaskToNotify,
|
|
|
++ UBaseType_t uxIndexToNotify,
|
|
|
++ BaseType_t * pxHigherPriorityTaskWoken );
|
|
|
++#define vTaskNotifyGiveFromISR( xTaskToNotify, pxHigherPriorityTaskWoken ) \
|
|
|
++ vTaskGenericNotifyGiveFromISR( ( xTaskToNotify ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( pxHigherPriorityTaskWoken ) );
|
|
|
++#define vTaskNotifyGiveIndexedFromISR( xTaskToNotify, uxIndexToNotify, pxHigherPriorityTaskWoken ) \
|
|
|
++ vTaskGenericNotifyGiveFromISR( ( xTaskToNotify ), ( uxIndexToNotify ), ( pxHigherPriorityTaskWoken ) );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * uint32_t ulTaskNotifyTakeIndexed( UBaseType_t uxIndexToWaitOn, BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Waits for a direct to task notification on a particular index in the calling
|
|
|
++ * task's notification array in a manner similar to taking a counting semaphore.
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for this
|
|
|
++ * function to be available.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * Events can be sent to a task using an intermediary object. Examples of such
|
|
|
++ * objects are queues, semaphores, mutexes and event groups. Task notifications
|
|
|
++ * are a method of sending an event directly to a task without the need for such
|
|
|
++ * an intermediary object.
|
|
|
++ *
|
|
|
++ * A notification sent to a task can optionally perform an action, such as
|
|
|
++ * update, overwrite or increment one of the task's notification values. In
|
|
|
++ * that way task notifications can be used to send data to a task, or be used as
|
|
|
++ * light weight and fast binary or counting semaphores.
|
|
|
++ *
|
|
|
++ * ulTaskNotifyTakeIndexed() is intended for use when a task notification is
|
|
|
++ * used as a faster and lighter weight binary or counting semaphore alternative.
|
|
|
++ * Actual FreeRTOS semaphores are taken using the xSemaphoreTake() API function,
|
|
|
++ * the equivalent action that instead uses a task notification is
|
|
|
++ * ulTaskNotifyTakeIndexed().
|
|
|
++ *
|
|
|
++ * When a task is using its notification value as a binary or counting semaphore
|
|
|
++ * other tasks should send notifications to it using the xTaskNotifyGiveIndexed()
|
|
|
++ * macro, or xTaskNotifyIndex() function with the eAction parameter set to
|
|
|
++ * eIncrement.
|
|
|
++ *
|
|
|
++ * ulTaskNotifyTakeIndexed() can either clear the task's notification value at
|
|
|
++ * the array index specified by the uxIndexToWaitOn parameter to zero on exit,
|
|
|
++ * in which case the notification value acts like a binary semaphore, or
|
|
|
++ * decrement the notification value on exit, in which case the notification
|
|
|
++ * value acts like a counting semaphore.
|
|
|
++ *
|
|
|
++ * A task can use ulTaskNotifyTakeIndexed() to [optionally] block to wait for
|
|
|
++ * a notification. The task does not consume any CPU time while it is in the
|
|
|
++ * Blocked state.
|
|
|
++ *
|
|
|
++ * Where as xTaskNotifyWaitIndexed() will return when a notification is pending,
|
|
|
++ * ulTaskNotifyTakeIndexed() will return when the task's notification value is
|
|
|
++ * not zero.
|
|
|
++ *
|
|
|
++ * **NOTE** Each notification within the array operates independently - a task
|
|
|
++ * can only block on one notification within the array at a time and will not be
|
|
|
++ * unblocked by a notification sent to any other array index.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. ulTaskNotifyTake() is the original API function, and remains backward
|
|
|
++ * compatible by always operating on the notification value at index 0 in the
|
|
|
++ * array. Calling ulTaskNotifyTake() is equivalent to calling
|
|
|
++ * ulTaskNotifyTakeIndexed() with the uxIndexToWaitOn parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param uxIndexToWaitOn The index within the calling task's array of
|
|
|
++ * notification values on which the calling task will wait for a notification to
|
|
|
++ * be non-zero. uxIndexToWaitOn must be less than
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES. xTaskNotifyTake() does
|
|
|
++ * not have this parameter and always waits for notifications on index 0.
|
|
|
++ *
|
|
|
++ * @param xClearCountOnExit if xClearCountOnExit is pdFALSE then the task's
|
|
|
++ * notification value is decremented when the function exits. In this way the
|
|
|
++ * notification value acts like a counting semaphore. If xClearCountOnExit is
|
|
|
++ * not pdFALSE then the task's notification value is cleared to zero when the
|
|
|
++ * function exits. In this way the notification value acts like a binary
|
|
|
++ * semaphore.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait The maximum amount of time that the task should wait in
|
|
|
++ * the Blocked state for the task's notification value to be greater than zero,
|
|
|
++ * should the count not already be greater than zero when
|
|
|
++ * ulTaskNotifyTake() was called. The task will not consume any processing
|
|
|
++ * time while it is in the Blocked state. This is specified in kernel ticks,
|
|
|
++ * the macro pdMS_TO_TICKS( value_in_ms ) can be used to convert a time
|
|
|
++ * specified in milliseconds to a time specified in ticks.
|
|
|
++ *
|
|
|
++ * @return The task's notification count before it is either cleared to zero or
|
|
|
++ * decremented (see the xClearCountOnExit parameter).
|
|
|
++ *
|
|
|
++ * \defgroup ulTaskNotifyTakeIndexed ulTaskNotifyTakeIndexed
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++uint32_t ulTaskGenericNotifyTake( UBaseType_t uxIndexToWaitOn,
|
|
|
++ BaseType_t xClearCountOnExit,
|
|
|
++ TickType_t xTicksToWait );
|
|
|
++#define ulTaskNotifyTake( xClearCountOnExit, xTicksToWait ) \
|
|
|
++ ulTaskGenericNotifyTake( ( tskDEFAULT_INDEX_TO_NOTIFY ), ( xClearCountOnExit ), ( xTicksToWait ) )
|
|
|
++#define ulTaskNotifyTakeIndexed( uxIndexToWaitOn, xClearCountOnExit, xTicksToWait ) \
|
|
|
++ ulTaskGenericNotifyTake( ( uxIndexToWaitOn ), ( xClearCountOnExit ), ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskNotifyStateClearIndexed( TaskHandle_t xTask, UBaseType_t uxIndexToCLear );
|
|
|
++ *
|
|
|
++ * BaseType_t xTaskNotifyStateClear( TaskHandle_t xTask );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for these
|
|
|
++ * functions to be available.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * If a notification is sent to an index within the array of notifications then
|
|
|
++ * the notification at that index is said to be 'pending' until it is read or
|
|
|
++ * explicitly cleared by the receiving task. xTaskNotifyStateClearIndexed()
|
|
|
++ * is the function that clears a pending notification without reading the
|
|
|
++ * notification value. The notification value at the same array index is not
|
|
|
++ * altered. Set xTask to NULL to clear the notification state of the calling
|
|
|
++ * task.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. xTaskNotifyStateClear() is the original API function, and remains
|
|
|
++ * backward compatible by always operating on the notification value at index 0
|
|
|
++ * within the array. Calling xTaskNotifyStateClear() is equivalent to calling
|
|
|
++ * xTaskNotifyStateClearIndexed() with the uxIndexToNotify parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param xTask The handle of the RTOS task that will have a notification state
|
|
|
++ * cleared. Set xTask to NULL to clear a notification state in the calling
|
|
|
++ * task. To obtain a task's handle create the task using xTaskCreate() and
|
|
|
++ * make use of the pxCreatedTask parameter, or create the task using
|
|
|
++ * xTaskCreateStatic() and store the returned value, or use the task's name in
|
|
|
++ * a call to xTaskGetHandle().
|
|
|
++ *
|
|
|
++ * @param uxIndexToClear The index within the target task's array of
|
|
|
++ * notification values to act upon. For example, setting uxIndexToClear to 1
|
|
|
++ * will clear the state of the notification at index 1 within the array.
|
|
|
++ * uxIndexToClear must be less than configTASK_NOTIFICATION_ARRAY_ENTRIES.
|
|
|
++ * ulTaskNotifyStateClear() does not have this parameter and always acts on the
|
|
|
++ * notification at index 0.
|
|
|
++ *
|
|
|
++ * @return pdTRUE if the task's notification state was set to
|
|
|
++ * eNotWaitingNotification, otherwise pdFALSE.
|
|
|
++ *
|
|
|
++ * \defgroup xTaskNotifyStateClearIndexed xTaskNotifyStateClearIndexed
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++BaseType_t xTaskGenericNotifyStateClear( TaskHandle_t xTask,
|
|
|
++ UBaseType_t uxIndexToClear );
|
|
|
++#define xTaskNotifyStateClear( xTask ) \
|
|
|
++ xTaskGenericNotifyStateClear( ( xTask ), ( tskDEFAULT_INDEX_TO_NOTIFY ) )
|
|
|
++#define xTaskNotifyStateClearIndexed( xTask, uxIndexToClear ) \
|
|
|
++ xTaskGenericNotifyStateClear( ( xTask ), ( uxIndexToClear ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task. h
|
|
|
++ * @code{c}
|
|
|
++ * uint32_t ulTaskNotifyValueClearIndexed( TaskHandle_t xTask, UBaseType_t uxIndexToClear, uint32_t ulBitsToClear );
|
|
|
++ *
|
|
|
++ * uint32_t ulTaskNotifyValueClear( TaskHandle_t xTask, uint32_t ulBitsToClear );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * See https://www.FreeRTOS.org/RTOS-task-notifications.html for details.
|
|
|
++ *
|
|
|
++ * configUSE_TASK_NOTIFICATIONS must be undefined or defined as 1 for these
|
|
|
++ * functions to be available.
|
|
|
++ *
|
|
|
++ * Each task has a private array of "notification values" (or 'notifications'),
|
|
|
++ * each of which is a 32-bit unsigned integer (uint32_t). The constant
|
|
|
++ * configTASK_NOTIFICATION_ARRAY_ENTRIES sets the number of indexes in the
|
|
|
++ * array, and (for backward compatibility) defaults to 1 if left undefined.
|
|
|
++ * Prior to FreeRTOS V10.4.0 there was only one notification value per task.
|
|
|
++ *
|
|
|
++ * ulTaskNotifyValueClearIndexed() clears the bits specified by the
|
|
|
++ * ulBitsToClear bit mask in the notification value at array index uxIndexToClear
|
|
|
++ * of the task referenced by xTask.
|
|
|
++ *
|
|
|
++ * Backward compatibility information:
|
|
|
++ * Prior to FreeRTOS V10.4.0 each task had a single "notification value", and
|
|
|
++ * all task notification API functions operated on that value. Replacing the
|
|
|
++ * single notification value with an array of notification values necessitated a
|
|
|
++ * new set of API functions that could address specific notifications within the
|
|
|
++ * array. ulTaskNotifyValueClear() is the original API function, and remains
|
|
|
++ * backward compatible by always operating on the notification value at index 0
|
|
|
++ * within the array. Calling ulTaskNotifyValueClear() is equivalent to calling
|
|
|
++ * ulTaskNotifyValueClearIndexed() with the uxIndexToClear parameter set to 0.
|
|
|
++ *
|
|
|
++ * @param xTask The handle of the RTOS task that will have bits in one of its
|
|
|
++ * notification values cleared. Set xTask to NULL to clear bits in a
|
|
|
++ * notification value of the calling task. To obtain a task's handle create the
|
|
|
++ * task using xTaskCreate() and make use of the pxCreatedTask parameter, or
|
|
|
++ * create the task using xTaskCreateStatic() and store the returned value, or
|
|
|
++ * use the task's name in a call to xTaskGetHandle().
|
|
|
++ *
|
|
|
++ * @param uxIndexToClear The index within the target task's array of
|
|
|
++ * notification values in which to clear the bits. uxIndexToClear
|
|
|
++ * must be less than configTASK_NOTIFICATION_ARRAY_ENTRIES.
|
|
|
++ * ulTaskNotifyValueClear() does not have this parameter and always clears bits
|
|
|
++ * in the notification value at index 0.
|
|
|
++ *
|
|
|
++ * @param ulBitsToClear Bit mask of the bits to clear in the notification value of
|
|
|
++ * xTask. Set a bit to 1 to clear the corresponding bits in the task's notification
|
|
|
++ * value. Set ulBitsToClear to 0xffffffff (UINT_MAX on 32-bit architectures) to clear
|
|
|
++ * the notification value to 0. Set ulBitsToClear to 0 to query the task's
|
|
|
++ * notification value without clearing any bits.
|
|
|
++ *
|
|
|
++ *
|
|
|
++ * @return The value of the target task's notification value before the bits
|
|
|
++ * specified by ulBitsToClear were cleared.
|
|
|
++ * \defgroup ulTaskNotifyValueClear ulTaskNotifyValueClear
|
|
|
++ * \ingroup TaskNotifications
|
|
|
++ */
|
|
|
++uint32_t ulTaskGenericNotifyValueClear( TaskHandle_t xTask,
|
|
|
++ UBaseType_t uxIndexToClear,
|
|
|
++ uint32_t ulBitsToClear );
|
|
|
++#define ulTaskNotifyValueClear( xTask, ulBitsToClear ) \
|
|
|
++ ulTaskGenericNotifyValueClear( ( xTask ), ( tskDEFAULT_INDEX_TO_NOTIFY ), ( ulBitsToClear ) )
|
|
|
++#define ulTaskNotifyValueClearIndexed( xTask, uxIndexToClear, ulBitsToClear ) \
|
|
|
++ ulTaskGenericNotifyValueClear( ( xTask ), ( uxIndexToClear ), ( ulBitsToClear ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * void vTaskSetTimeOutState( TimeOut_t * const pxTimeOut );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Capture the current time for future use with xTaskCheckForTimeOut().
|
|
|
++ *
|
|
|
++ * @param pxTimeOut Pointer to a timeout object into which the current time
|
|
|
++ * is to be captured. The captured time includes the tick count and the number
|
|
|
++ * of times the tick count has overflowed since the system first booted.
|
|
|
++ * \defgroup vTaskSetTimeOutState vTaskSetTimeOutState
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++void vTaskSetTimeOutState( TimeOut_t * const pxTimeOut );
|
|
|
++
|
|
|
++/**
|
|
|
++ * task.h
|
|
|
++ * @code{c}
|
|
|
++ * BaseType_t xTaskCheckForTimeOut( TimeOut_t * const pxTimeOut, TickType_t * const pxTicksToWait );
|
|
|
++ * @endcode
|
|
|
++ *
|
|
|
++ * Determines if pxTicksToWait ticks has passed since a time was captured
|
|
|
++ * using a call to vTaskSetTimeOutState(). The captured time includes the tick
|
|
|
++ * count and the number of times the tick count has overflowed.
|
|
|
++ *
|
|
|
++ * @param pxTimeOut The time status as captured previously using
|
|
|
++ * vTaskSetTimeOutState. If the timeout has not yet occurred, it is updated
|
|
|
++ * to reflect the current time status.
|
|
|
++ * @param pxTicksToWait The number of ticks to check for timeout i.e. if
|
|
|
++ * pxTicksToWait ticks have passed since pxTimeOut was last updated (either by
|
|
|
++ * vTaskSetTimeOutState() or xTaskCheckForTimeOut()), the timeout has occurred.
|
|
|
++ * If the timeout has not occurred, pxTicksToWait is updated to reflect the
|
|
|
++ * number of remaining ticks.
|
|
|
++ *
|
|
|
++ * @return If timeout has occurred, pdTRUE is returned. Otherwise pdFALSE is
|
|
|
++ * returned and pxTicksToWait is updated to reflect the number of remaining
|
|
|
++ * ticks.
|
|
|
++ *
|
|
|
++ * @see https://www.FreeRTOS.org/xTaskCheckForTimeOut.html
|
|
|
++ *
|
|
|
++ * Example Usage:
|
|
|
++ * @code{c}
|
|
|
++ * // Driver library function used to receive uxWantedBytes from an Rx buffer
|
|
|
++ * // that is filled by a UART interrupt. If there are not enough bytes in the
|
|
|
++ * // Rx buffer then the task enters the Blocked state until it is notified that
|
|
|
++ * // more data has been placed into the buffer. If there is still not enough
|
|
|
++ * // data then the task re-enters the Blocked state, and xTaskCheckForTimeOut()
|
|
|
++ * // is used to re-calculate the Block time to ensure the total amount of time
|
|
|
++ * // spent in the Blocked state does not exceed MAX_TIME_TO_WAIT. This
|
|
|
++ * // continues until either the buffer contains at least uxWantedBytes bytes,
|
|
|
++ * // or the total amount of time spent in the Blocked state reaches
|
|
|
++ * // MAX_TIME_TO_WAIT - at which point the task reads however many bytes are
|
|
|
++ * // available up to a maximum of uxWantedBytes.
|
|
|
++ *
|
|
|
++ * size_t xUART_Receive( uint8_t *pucBuffer, size_t uxWantedBytes )
|
|
|
++ * {
|
|
|
++ * size_t uxReceived = 0;
|
|
|
++ * TickType_t xTicksToWait = MAX_TIME_TO_WAIT;
|
|
|
++ * TimeOut_t xTimeOut;
|
|
|
++ *
|
|
|
++ * // Initialize xTimeOut. This records the time at which this function
|
|
|
++ * // was entered.
|
|
|
++ * vTaskSetTimeOutState( &xTimeOut );
|
|
|
++ *
|
|
|
++ * // Loop until the buffer contains the wanted number of bytes, or a
|
|
|
++ * // timeout occurs.
|
|
|
++ * while( UART_bytes_in_rx_buffer( pxUARTInstance ) < uxWantedBytes )
|
|
|
++ * {
|
|
|
++ * // The buffer didn't contain enough data so this task is going to
|
|
|
++ * // enter the Blocked state. Adjusting xTicksToWait to account for
|
|
|
++ * // any time that has been spent in the Blocked state within this
|
|
|
++ * // function so far to ensure the total amount of time spent in the
|
|
|
++ * // Blocked state does not exceed MAX_TIME_TO_WAIT.
|
|
|
++ * if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) != pdFALSE )
|
|
|
++ * {
|
|
|
++ * //Timed out before the wanted number of bytes were available,
|
|
|
++ * // exit the loop.
|
|
|
++ * break;
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Wait for a maximum of xTicksToWait ticks to be notified that the
|
|
|
++ * // receive interrupt has placed more data into the buffer.
|
|
|
++ * ulTaskNotifyTake( pdTRUE, xTicksToWait );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Attempt to read uxWantedBytes from the receive buffer into pucBuffer.
|
|
|
++ * // The actual number of bytes read (which might be less than
|
|
|
++ * // uxWantedBytes) is returned.
|
|
|
++ * uxReceived = UART_read_from_receive_buffer( pxUARTInstance,
|
|
|
++ * pucBuffer,
|
|
|
++ * uxWantedBytes );
|
|
|
++ *
|
|
|
++ * return uxReceived;
|
|
|
++ * }
|
|
|
++ * @endcode
|
|
|
++ * \defgroup xTaskCheckForTimeOut xTaskCheckForTimeOut
|
|
|
++ * \ingroup TaskCtrl
|
|
|
++ */
|
|
|
++BaseType_t xTaskCheckForTimeOut( TimeOut_t * const pxTimeOut,
|
|
|
++ TickType_t * const pxTicksToWait );
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* SCHEDULER INTERNALS AVAILABLE FOR PORTING PURPOSES
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/*
|
|
|
++ * Return the handle of the calling task.
|
|
|
++ */
|
|
|
++TaskHandle_t xTaskGetCurrentTaskHandle( void );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Returns the scheduler state as taskSCHEDULER_RUNNING,
|
|
|
++ * taskSCHEDULER_NOT_STARTED or taskSCHEDULER_SUSPENDED.
|
|
|
++ */
|
|
|
++BaseType_t xTaskGetSchedulerState( void );
|
|
|
++
|
|
|
++/* ESP32 */
|
|
|
++BaseType_t xTaskGetAffinity( TaskHandle_t xTask );
|
|
|
++TaskHandle_t xTaskGetCurrentTaskHandleForCPU( BaseType_t cpuid );
|
|
|
++TaskHandle_t xTaskGetIdleTaskHandleForCPU( UBaseType_t cpuid );
|
|
|
++/* Unimplemented */
|
|
|
++#if ( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 )
|
|
|
++void vTaskSetThreadLocalStoragePointer( TaskHandle_t xTaskToSet,
|
|
|
++ BaseType_t xIndex,
|
|
|
++ void * pvValue );
|
|
|
++void * pvTaskGetThreadLocalStoragePointer( TaskHandle_t xTaskToQuery,
|
|
|
++ BaseType_t xIndex );
|
|
|
++#if ( configTHREAD_LOCAL_STORAGE_DELETE_CALLBACKS )
|
|
|
++typedef void (*TlsDeleteCallbackFunction_t)( int, void * );
|
|
|
++void vTaskSetThreadLocalStoragePointerAndDelCallback( TaskHandle_t xTaskToSet, BaseType_t xIndex, void *pvValue, TlsDeleteCallbackFunction_t pvDelCallback);
|
|
|
++#endif
|
|
|
++#endif
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++#endif /* INC_TASK_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/timers.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/timers.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..c5d1acf4d4
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/include/freertos/timers.h
|
|
|
+@@ -0,0 +1,1185 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++#ifndef TIMERS_H
|
|
|
++#define TIMERS_H
|
|
|
++
|
|
|
++#ifndef INC_FREERTOS_H
|
|
|
++ #error "include FreeRTOS.h must appear in source files before include timers.h"
|
|
|
++#endif
|
|
|
++
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* MACROS AND DEFINITIONS
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* IDs for commands that can be sent/received on the timer queue. These are to
|
|
|
++ * be used solely through the macros that make up the public software timer API,
|
|
|
++ * as defined below. The commands that are sent from interrupts must use the
|
|
|
++ * highest numbers as tmrFIRST_FROM_ISR_COMMAND is used to determine if the task
|
|
|
++ * or interrupt version of the queue send function should be used. */
|
|
|
++#define tmrCOMMAND_EXECUTE_CALLBACK_FROM_ISR ( ( BaseType_t ) -2 )
|
|
|
++#define tmrCOMMAND_EXECUTE_CALLBACK ( ( BaseType_t ) -1 )
|
|
|
++#define tmrCOMMAND_START_DONT_TRACE ( ( BaseType_t ) 0 )
|
|
|
++#define tmrCOMMAND_START ( ( BaseType_t ) 1 )
|
|
|
++#define tmrCOMMAND_RESET ( ( BaseType_t ) 2 )
|
|
|
++#define tmrCOMMAND_STOP ( ( BaseType_t ) 3 )
|
|
|
++#define tmrCOMMAND_CHANGE_PERIOD ( ( BaseType_t ) 4 )
|
|
|
++#define tmrCOMMAND_DELETE ( ( BaseType_t ) 5 )
|
|
|
++
|
|
|
++#define tmrFIRST_FROM_ISR_COMMAND ( ( BaseType_t ) 6 )
|
|
|
++#define tmrCOMMAND_START_FROM_ISR ( ( BaseType_t ) 6 )
|
|
|
++#define tmrCOMMAND_RESET_FROM_ISR ( ( BaseType_t ) 7 )
|
|
|
++#define tmrCOMMAND_STOP_FROM_ISR ( ( BaseType_t ) 8 )
|
|
|
++#define tmrCOMMAND_CHANGE_PERIOD_FROM_ISR ( ( BaseType_t ) 9 )
|
|
|
++
|
|
|
++/**
|
|
|
++ * Type by which software timers are referenced. For example, a call to
|
|
|
++ * xTimerCreate() returns an TimerHandle_t variable that can then be used to
|
|
|
++ * reference the subject timer in calls to other software timer API functions
|
|
|
++ * (for example, xTimerStart(), xTimerReset(), etc.).
|
|
|
++ */
|
|
|
++struct tmrTimerControl; /* The old naming convention is used to prevent breaking kernel aware debuggers. */
|
|
|
++typedef struct tmrTimerControl * TimerHandle_t;
|
|
|
++
|
|
|
++/*
|
|
|
++ * Defines the prototype to which timer callback functions must conform.
|
|
|
++ */
|
|
|
++typedef void (* TimerCallbackFunction_t)( TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/**
|
|
|
++ * TimerHandle_t xTimerCreate( const char * const pcTimerName,
|
|
|
++ * TickType_t xTimerPeriodInTicks,
|
|
|
++ * UBaseType_t uxAutoReload,
|
|
|
++ * void * pvTimerID,
|
|
|
++ * TimerCallbackFunction_t pxCallbackFunction );
|
|
|
++ *
|
|
|
++ * Creates a new software timer instance, and returns a handle by which the
|
|
|
++ * created software timer can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, software timers use a block
|
|
|
++ * of memory, in which the timer data structure is stored. If a software timer
|
|
|
++ * is created using xTimerCreate() then the required memory is automatically
|
|
|
++ * dynamically allocated inside the xTimerCreate() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a software timer is created using
|
|
|
++ * xTimerCreateStatic() then the application writer must provide the memory that
|
|
|
++ * will get used by the software timer. xTimerCreateStatic() therefore allows a
|
|
|
++ * software timer to be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Timers are created in the dormant state. The xTimerStart(), xTimerReset(),
|
|
|
++ * xTimerStartFromISR(), xTimerResetFromISR(), xTimerChangePeriod() and
|
|
|
++ * xTimerChangePeriodFromISR() API functions can all be used to transition a
|
|
|
++ * timer into the active state.
|
|
|
++ *
|
|
|
++ * @param pcTimerName A text name that is assigned to the timer. This is done
|
|
|
++ * purely to assist debugging. The kernel itself only ever references a timer
|
|
|
++ * by its handle, and never by its name.
|
|
|
++ *
|
|
|
++ * @param xTimerPeriodInTicks The timer period. The time is defined in tick
|
|
|
++ * periods so the constant portTICK_PERIOD_MS can be used to convert a time that
|
|
|
++ * has been specified in milliseconds. For example, if the timer must expire
|
|
|
++ * after 100 ticks, then xTimerPeriodInTicks should be set to 100.
|
|
|
++ * Alternatively, if the timer must expire after 500ms, then xPeriod can be set
|
|
|
++ * to ( 500 / portTICK_PERIOD_MS ) provided configTICK_RATE_HZ is less than or
|
|
|
++ * equal to 1000. Time timer period must be greater than 0.
|
|
|
++ *
|
|
|
++ * @param uxAutoReload If uxAutoReload is set to pdTRUE then the timer will
|
|
|
++ * expire repeatedly with a frequency set by the xTimerPeriodInTicks parameter.
|
|
|
++ * If uxAutoReload is set to pdFALSE then the timer will be a one-shot timer and
|
|
|
++ * enter the dormant state after it expires.
|
|
|
++ *
|
|
|
++ * @param pvTimerID An identifier that is assigned to the timer being created.
|
|
|
++ * Typically this would be used in the timer callback function to identify which
|
|
|
++ * timer expired when the same callback function is assigned to more than one
|
|
|
++ * timer.
|
|
|
++ *
|
|
|
++ * @param pxCallbackFunction The function to call when the timer expires.
|
|
|
++ * Callback functions must have the prototype defined by TimerCallbackFunction_t,
|
|
|
++ * which is "void vCallbackFunction( TimerHandle_t xTimer );".
|
|
|
++ *
|
|
|
++ * @return If the timer is successfully created then a handle to the newly
|
|
|
++ * created timer is returned. If the timer cannot be created because there is
|
|
|
++ * insufficient FreeRTOS heap remaining to allocate the timer
|
|
|
++ * structures then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * #define NUM_TIMERS 5
|
|
|
++ *
|
|
|
++ * // An array to hold handles to the created timers.
|
|
|
++ * TimerHandle_t xTimers[ NUM_TIMERS ];
|
|
|
++ *
|
|
|
++ * // An array to hold a count of the number of times each timer expires.
|
|
|
++ * int32_t lExpireCounters[ NUM_TIMERS ] = { 0 };
|
|
|
++ *
|
|
|
++ * // Define a callback function that will be used by multiple timer instances.
|
|
|
++ * // The callback function does nothing but count the number of times the
|
|
|
++ * // associated timer expires, and stop the timer once the timer has expired
|
|
|
++ * // 10 times.
|
|
|
++ * void vTimerCallback( TimerHandle_t pxTimer )
|
|
|
++ * {
|
|
|
++ * int32_t lArrayIndex;
|
|
|
++ * const int32_t xMaxExpiryCountBeforeStopping = 10;
|
|
|
++ *
|
|
|
++ * // Optionally do something if the pxTimer parameter is NULL.
|
|
|
++ * configASSERT( pxTimer );
|
|
|
++ *
|
|
|
++ * // Which timer expired?
|
|
|
++ * lArrayIndex = ( int32_t ) pvTimerGetTimerID( pxTimer );
|
|
|
++ *
|
|
|
++ * // Increment the number of times that pxTimer has expired.
|
|
|
++ * lExpireCounters[ lArrayIndex ] += 1;
|
|
|
++ *
|
|
|
++ * // If the timer has expired 10 times then stop it from running.
|
|
|
++ * if( lExpireCounters[ lArrayIndex ] == xMaxExpiryCountBeforeStopping )
|
|
|
++ * {
|
|
|
++ * // Do not use a block time if calling a timer API function from a
|
|
|
++ * // timer callback function, as doing so could cause a deadlock!
|
|
|
++ * xTimerStop( pxTimer, 0 );
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * void main( void )
|
|
|
++ * {
|
|
|
++ * int32_t x;
|
|
|
++ *
|
|
|
++ * // Create then start some timers. Starting the timers before the scheduler
|
|
|
++ * // has been started means the timers will start running immediately that
|
|
|
++ * // the scheduler starts.
|
|
|
++ * for( x = 0; x < NUM_TIMERS; x++ )
|
|
|
++ * {
|
|
|
++ * xTimers[ x ] = xTimerCreate( "Timer", // Just a text name, not used by the kernel.
|
|
|
++ * ( 100 * x ), // The timer period in ticks.
|
|
|
++ * pdTRUE, // The timers will auto-reload themselves when they expire.
|
|
|
++ * ( void * ) x, // Assign each timer a unique id equal to its array index.
|
|
|
++ * vTimerCallback // Each timer calls the same callback when it expires.
|
|
|
++ * );
|
|
|
++ *
|
|
|
++ * if( xTimers[ x ] == NULL )
|
|
|
++ * {
|
|
|
++ * // The timer was not created.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // Start the timer. No block time is specified, and even if one was
|
|
|
++ * // it would be ignored because the scheduler has not yet been
|
|
|
++ * // started.
|
|
|
++ * if( xTimerStart( xTimers[ x ], 0 ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The timer could not be set into the Active state.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ * // Create tasks here.
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Starting the scheduler will start the timers running as they have already
|
|
|
++ * // been set into the active state.
|
|
|
++ * vTaskStartScheduler();
|
|
|
++ *
|
|
|
++ * // Should not reach here.
|
|
|
++ * for( ;; );
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ TimerHandle_t xTimerCreate( const char * const pcTimerName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++ const TickType_t xTimerPeriodInTicks,
|
|
|
++ const UBaseType_t uxAutoReload,
|
|
|
++ void * const pvTimerID,
|
|
|
++ TimerCallbackFunction_t pxCallbackFunction );
|
|
|
++#endif
|
|
|
++
|
|
|
++/**
|
|
|
++ * TimerHandle_t xTimerCreateStatic(const char * const pcTimerName,
|
|
|
++ * TickType_t xTimerPeriodInTicks,
|
|
|
++ * UBaseType_t uxAutoReload,
|
|
|
++ * void * pvTimerID,
|
|
|
++ * TimerCallbackFunction_t pxCallbackFunction,
|
|
|
++ * StaticTimer_t *pxTimerBuffer );
|
|
|
++ *
|
|
|
++ * Creates a new software timer instance, and returns a handle by which the
|
|
|
++ * created software timer can be referenced.
|
|
|
++ *
|
|
|
++ * Internally, within the FreeRTOS implementation, software timers use a block
|
|
|
++ * of memory, in which the timer data structure is stored. If a software timer
|
|
|
++ * is created using xTimerCreate() then the required memory is automatically
|
|
|
++ * dynamically allocated inside the xTimerCreate() function. (see
|
|
|
++ * https://www.FreeRTOS.org/a00111.html). If a software timer is created using
|
|
|
++ * xTimerCreateStatic() then the application writer must provide the memory that
|
|
|
++ * will get used by the software timer. xTimerCreateStatic() therefore allows a
|
|
|
++ * software timer to be created without using any dynamic memory allocation.
|
|
|
++ *
|
|
|
++ * Timers are created in the dormant state. The xTimerStart(), xTimerReset(),
|
|
|
++ * xTimerStartFromISR(), xTimerResetFromISR(), xTimerChangePeriod() and
|
|
|
++ * xTimerChangePeriodFromISR() API functions can all be used to transition a
|
|
|
++ * timer into the active state.
|
|
|
++ *
|
|
|
++ * @param pcTimerName A text name that is assigned to the timer. This is done
|
|
|
++ * purely to assist debugging. The kernel itself only ever references a timer
|
|
|
++ * by its handle, and never by its name.
|
|
|
++ *
|
|
|
++ * @param xTimerPeriodInTicks The timer period. The time is defined in tick
|
|
|
++ * periods so the constant portTICK_PERIOD_MS can be used to convert a time that
|
|
|
++ * has been specified in milliseconds. For example, if the timer must expire
|
|
|
++ * after 100 ticks, then xTimerPeriodInTicks should be set to 100.
|
|
|
++ * Alternatively, if the timer must expire after 500ms, then xPeriod can be set
|
|
|
++ * to ( 500 / portTICK_PERIOD_MS ) provided configTICK_RATE_HZ is less than or
|
|
|
++ * equal to 1000. The timer period must be greater than 0.
|
|
|
++ *
|
|
|
++ * @param uxAutoReload If uxAutoReload is set to pdTRUE then the timer will
|
|
|
++ * expire repeatedly with a frequency set by the xTimerPeriodInTicks parameter.
|
|
|
++ * If uxAutoReload is set to pdFALSE then the timer will be a one-shot timer and
|
|
|
++ * enter the dormant state after it expires.
|
|
|
++ *
|
|
|
++ * @param pvTimerID An identifier that is assigned to the timer being created.
|
|
|
++ * Typically this would be used in the timer callback function to identify which
|
|
|
++ * timer expired when the same callback function is assigned to more than one
|
|
|
++ * timer.
|
|
|
++ *
|
|
|
++ * @param pxCallbackFunction The function to call when the timer expires.
|
|
|
++ * Callback functions must have the prototype defined by TimerCallbackFunction_t,
|
|
|
++ * which is "void vCallbackFunction( TimerHandle_t xTimer );".
|
|
|
++ *
|
|
|
++ * @param pxTimerBuffer Must point to a variable of type StaticTimer_t, which
|
|
|
++ * will be then be used to hold the software timer's data structures, removing
|
|
|
++ * the need for the memory to be allocated dynamically.
|
|
|
++ *
|
|
|
++ * @return If the timer is created then a handle to the created timer is
|
|
|
++ * returned. If pxTimerBuffer was NULL then NULL is returned.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ *
|
|
|
++ * // The buffer used to hold the software timer's data structure.
|
|
|
++ * static StaticTimer_t xTimerBuffer;
|
|
|
++ *
|
|
|
++ * // A variable that will be incremented by the software timer's callback
|
|
|
++ * // function.
|
|
|
++ * UBaseType_t uxVariableToIncrement = 0;
|
|
|
++ *
|
|
|
++ * // A software timer callback function that increments a variable passed to
|
|
|
++ * // it when the software timer was created. After the 5th increment the
|
|
|
++ * // callback function stops the software timer.
|
|
|
++ * static void prvTimerCallback( TimerHandle_t xExpiredTimer )
|
|
|
++ * {
|
|
|
++ * UBaseType_t *puxVariableToIncrement;
|
|
|
++ * BaseType_t xReturned;
|
|
|
++ *
|
|
|
++ * // Obtain the address of the variable to increment from the timer ID.
|
|
|
++ * puxVariableToIncrement = ( UBaseType_t * ) pvTimerGetTimerID( xExpiredTimer );
|
|
|
++ *
|
|
|
++ * // Increment the variable to show the timer callback has executed.
|
|
|
++ * ( *puxVariableToIncrement )++;
|
|
|
++ *
|
|
|
++ * // If this callback has executed the required number of times, stop the
|
|
|
++ * // timer.
|
|
|
++ * if( *puxVariableToIncrement == 5 )
|
|
|
++ * {
|
|
|
++ * // This is called from a timer callback so must not block.
|
|
|
++ * xTimerStop( xExpiredTimer, staticDONT_BLOCK );
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ *
|
|
|
++ * void main( void )
|
|
|
++ * {
|
|
|
++ * // Create the software time. xTimerCreateStatic() has an extra parameter
|
|
|
++ * // than the normal xTimerCreate() API function. The parameter is a pointer
|
|
|
++ * // to the StaticTimer_t structure that will hold the software timer
|
|
|
++ * // structure. If the parameter is passed as NULL then the structure will be
|
|
|
++ * // allocated dynamically, just as if xTimerCreate() had been called.
|
|
|
++ * xTimer = xTimerCreateStatic( "T1", // Text name for the task. Helps debugging only. Not used by FreeRTOS.
|
|
|
++ * xTimerPeriod, // The period of the timer in ticks.
|
|
|
++ * pdTRUE, // This is an auto-reload timer.
|
|
|
++ * ( void * ) &uxVariableToIncrement, // A variable incremented by the software timer's callback function
|
|
|
++ * prvTimerCallback, // The function to execute when the timer expires.
|
|
|
++ * &xTimerBuffer ); // The buffer that will hold the software timer structure.
|
|
|
++ *
|
|
|
++ * // The scheduler has not started yet so a block time is not used.
|
|
|
++ * xReturned = xTimerStart( xTimer, 0 );
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ * // Create tasks here.
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Starting the scheduler will start the timers running as they have already
|
|
|
++ * // been set into the active state.
|
|
|
++ * vTaskStartScheduler();
|
|
|
++ *
|
|
|
++ * // Should not reach here.
|
|
|
++ * for( ;; );
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ TimerHandle_t xTimerCreateStatic( const char * const pcTimerName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++ const TickType_t xTimerPeriodInTicks,
|
|
|
++ const UBaseType_t uxAutoReload,
|
|
|
++ void * const pvTimerID,
|
|
|
++ TimerCallbackFunction_t pxCallbackFunction,
|
|
|
++ StaticTimer_t * pxTimerBuffer );
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++/**
|
|
|
++ * void *pvTimerGetTimerID( TimerHandle_t xTimer );
|
|
|
++ *
|
|
|
++ * Returns the ID assigned to the timer.
|
|
|
++ *
|
|
|
++ * IDs are assigned to timers using the pvTimerID parameter of the call to
|
|
|
++ * xTimerCreated() that was used to create the timer, and by calling the
|
|
|
++ * vTimerSetTimerID() API function.
|
|
|
++ *
|
|
|
++ * If the same callback function is assigned to multiple timers then the timer
|
|
|
++ * ID can be used as time specific (timer local) storage.
|
|
|
++ *
|
|
|
++ * @param xTimer The timer being queried.
|
|
|
++ *
|
|
|
++ * @return The ID assigned to the timer being queried.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ *
|
|
|
++ * See the xTimerCreate() API function example usage scenario.
|
|
|
++ */
|
|
|
++void * pvTimerGetTimerID( const TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/**
|
|
|
++ * void vTimerSetTimerID( TimerHandle_t xTimer, void *pvNewID );
|
|
|
++ *
|
|
|
++ * Sets the ID assigned to the timer.
|
|
|
++ *
|
|
|
++ * IDs are assigned to timers using the pvTimerID parameter of the call to
|
|
|
++ * xTimerCreated() that was used to create the timer.
|
|
|
++ *
|
|
|
++ * If the same callback function is assigned to multiple timers then the timer
|
|
|
++ * ID can be used as time specific (timer local) storage.
|
|
|
++ *
|
|
|
++ * @param xTimer The timer being updated.
|
|
|
++ *
|
|
|
++ * @param pvNewID The ID to assign to the timer.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ *
|
|
|
++ * See the xTimerCreate() API function example usage scenario.
|
|
|
++ */
|
|
|
++void vTimerSetTimerID( TimerHandle_t xTimer,
|
|
|
++ void * pvNewID );
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerIsTimerActive( TimerHandle_t xTimer );
|
|
|
++ *
|
|
|
++ * Queries a timer to see if it is active or dormant.
|
|
|
++ *
|
|
|
++ * A timer will be dormant if:
|
|
|
++ * 1) It has been created but not started, or
|
|
|
++ * 2) It is an expired one-shot timer that has not been restarted.
|
|
|
++ *
|
|
|
++ * Timers are created in the dormant state. The xTimerStart(), xTimerReset(),
|
|
|
++ * xTimerStartFromISR(), xTimerResetFromISR(), xTimerChangePeriod() and
|
|
|
++ * xTimerChangePeriodFromISR() API functions can all be used to transition a timer into the
|
|
|
++ * active state.
|
|
|
++ *
|
|
|
++ * @param xTimer The timer being queried.
|
|
|
++ *
|
|
|
++ * @return pdFALSE will be returned if the timer is dormant. A value other than
|
|
|
++ * pdFALSE will be returned if the timer is active.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // This function assumes xTimer has already been created.
|
|
|
++ * void vAFunction( TimerHandle_t xTimer )
|
|
|
++ * {
|
|
|
++ * if( xTimerIsTimerActive( xTimer ) != pdFALSE ) // or more simply and equivalently "if( xTimerIsTimerActive( xTimer ) )"
|
|
|
++ * {
|
|
|
++ * // xTimer is active, do something.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // xTimer is not active, do something else.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++BaseType_t xTimerIsTimerActive( TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/**
|
|
|
++ * TaskHandle_t xTimerGetTimerDaemonTaskHandle( void );
|
|
|
++ *
|
|
|
++ * Simply returns the handle of the timer service/daemon task. It it not valid
|
|
|
++ * to call xTimerGetTimerDaemonTaskHandle() before the scheduler has been started.
|
|
|
++ */
|
|
|
++TaskHandle_t xTimerGetTimerDaemonTaskHandle( void );
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerStart( TimerHandle_t xTimer, TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * Timer functionality is provided by a timer service/daemon task. Many of the
|
|
|
++ * public FreeRTOS timer API functions send commands to the timer service task
|
|
|
++ * through a queue called the timer command queue. The timer command queue is
|
|
|
++ * private to the kernel itself and is not directly accessible to application
|
|
|
++ * code. The length of the timer command queue is set by the
|
|
|
++ * configTIMER_QUEUE_LENGTH configuration constant.
|
|
|
++ *
|
|
|
++ * xTimerStart() starts a timer that was previously created using the
|
|
|
++ * xTimerCreate() API function. If the timer had already been started and was
|
|
|
++ * already in the active state, then xTimerStart() has equivalent functionality
|
|
|
++ * to the xTimerReset() API function.
|
|
|
++ *
|
|
|
++ * Starting a timer ensures the timer is in the active state. If the timer
|
|
|
++ * is not stopped, deleted, or reset in the mean time, the callback function
|
|
|
++ * associated with the timer will get called 'n' ticks after xTimerStart() was
|
|
|
++ * called, where 'n' is the timers defined period.
|
|
|
++ *
|
|
|
++ * It is valid to call xTimerStart() before the scheduler has been started, but
|
|
|
++ * when this is done the timer will not actually start until the scheduler is
|
|
|
++ * started, and the timers expiry time will be relative to when the scheduler is
|
|
|
++ * started, not relative to when xTimerStart() was called.
|
|
|
++ *
|
|
|
++ * The configUSE_TIMERS configuration constant must be set to 1 for xTimerStart()
|
|
|
++ * to be available.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being started/restarted.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait Specifies the time, in ticks, that the calling task should
|
|
|
++ * be held in the Blocked state to wait for the start command to be successfully
|
|
|
++ * sent to the timer command queue, should the queue already be full when
|
|
|
++ * xTimerStart() was called. xTicksToWait is ignored if xTimerStart() is called
|
|
|
++ * before the scheduler is started.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the start command could not be sent to
|
|
|
++ * the timer command queue even after xTicksToWait ticks had passed. pdPASS will
|
|
|
++ * be returned if the command was successfully sent to the timer command queue.
|
|
|
++ * When the command is actually processed will depend on the priority of the
|
|
|
++ * timer service/daemon task relative to other tasks in the system, although the
|
|
|
++ * timers expiry time is relative to when xTimerStart() is actually called. The
|
|
|
++ * timer service/daemon task priority is set by the configTIMER_TASK_PRIORITY
|
|
|
++ * configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ *
|
|
|
++ * See the xTimerCreate() API function example usage scenario.
|
|
|
++ *
|
|
|
++ */
|
|
|
++#define xTimerStart( xTimer, xTicksToWait ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_START, ( xTaskGetTickCount() ), NULL, ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerStop( TimerHandle_t xTimer, TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * Timer functionality is provided by a timer service/daemon task. Many of the
|
|
|
++ * public FreeRTOS timer API functions send commands to the timer service task
|
|
|
++ * through a queue called the timer command queue. The timer command queue is
|
|
|
++ * private to the kernel itself and is not directly accessible to application
|
|
|
++ * code. The length of the timer command queue is set by the
|
|
|
++ * configTIMER_QUEUE_LENGTH configuration constant.
|
|
|
++ *
|
|
|
++ * xTimerStop() stops a timer that was previously started using either of the
|
|
|
++ * The xTimerStart(), xTimerReset(), xTimerStartFromISR(), xTimerResetFromISR(),
|
|
|
++ * xTimerChangePeriod() or xTimerChangePeriodFromISR() API functions.
|
|
|
++ *
|
|
|
++ * Stopping a timer ensures the timer is not in the active state.
|
|
|
++ *
|
|
|
++ * The configUSE_TIMERS configuration constant must be set to 1 for xTimerStop()
|
|
|
++ * to be available.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being stopped.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait Specifies the time, in ticks, that the calling task should
|
|
|
++ * be held in the Blocked state to wait for the stop command to be successfully
|
|
|
++ * sent to the timer command queue, should the queue already be full when
|
|
|
++ * xTimerStop() was called. xTicksToWait is ignored if xTimerStop() is called
|
|
|
++ * before the scheduler is started.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the stop command could not be sent to
|
|
|
++ * the timer command queue even after xTicksToWait ticks had passed. pdPASS will
|
|
|
++ * be returned if the command was successfully sent to the timer command queue.
|
|
|
++ * When the command is actually processed will depend on the priority of the
|
|
|
++ * timer service/daemon task relative to other tasks in the system. The timer
|
|
|
++ * service/daemon task priority is set by the configTIMER_TASK_PRIORITY
|
|
|
++ * configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ *
|
|
|
++ * See the xTimerCreate() API function example usage scenario.
|
|
|
++ *
|
|
|
++ */
|
|
|
++#define xTimerStop( xTimer, xTicksToWait ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_STOP, 0U, NULL, ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerChangePeriod( TimerHandle_t xTimer,
|
|
|
++ * TickType_t xNewPeriod,
|
|
|
++ * TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * Timer functionality is provided by a timer service/daemon task. Many of the
|
|
|
++ * public FreeRTOS timer API functions send commands to the timer service task
|
|
|
++ * through a queue called the timer command queue. The timer command queue is
|
|
|
++ * private to the kernel itself and is not directly accessible to application
|
|
|
++ * code. The length of the timer command queue is set by the
|
|
|
++ * configTIMER_QUEUE_LENGTH configuration constant.
|
|
|
++ *
|
|
|
++ * xTimerChangePeriod() changes the period of a timer that was previously
|
|
|
++ * created using the xTimerCreate() API function.
|
|
|
++ *
|
|
|
++ * xTimerChangePeriod() can be called to change the period of an active or
|
|
|
++ * dormant state timer.
|
|
|
++ *
|
|
|
++ * The configUSE_TIMERS configuration constant must be set to 1 for
|
|
|
++ * xTimerChangePeriod() to be available.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer that is having its period changed.
|
|
|
++ *
|
|
|
++ * @param xNewPeriod The new period for xTimer. Timer periods are specified in
|
|
|
++ * tick periods, so the constant portTICK_PERIOD_MS can be used to convert a time
|
|
|
++ * that has been specified in milliseconds. For example, if the timer must
|
|
|
++ * expire after 100 ticks, then xNewPeriod should be set to 100. Alternatively,
|
|
|
++ * if the timer must expire after 500ms, then xNewPeriod can be set to
|
|
|
++ * ( 500 / portTICK_PERIOD_MS ) provided configTICK_RATE_HZ is less than
|
|
|
++ * or equal to 1000.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait Specifies the time, in ticks, that the calling task should
|
|
|
++ * be held in the Blocked state to wait for the change period command to be
|
|
|
++ * successfully sent to the timer command queue, should the queue already be
|
|
|
++ * full when xTimerChangePeriod() was called. xTicksToWait is ignored if
|
|
|
++ * xTimerChangePeriod() is called before the scheduler is started.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the change period command could not be
|
|
|
++ * sent to the timer command queue even after xTicksToWait ticks had passed.
|
|
|
++ * pdPASS will be returned if the command was successfully sent to the timer
|
|
|
++ * command queue. When the command is actually processed will depend on the
|
|
|
++ * priority of the timer service/daemon task relative to other tasks in the
|
|
|
++ * system. The timer service/daemon task priority is set by the
|
|
|
++ * configTIMER_TASK_PRIORITY configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // This function assumes xTimer has already been created. If the timer
|
|
|
++ * // referenced by xTimer is already active when it is called, then the timer
|
|
|
++ * // is deleted. If the timer referenced by xTimer is not active when it is
|
|
|
++ * // called, then the period of the timer is set to 500ms and the timer is
|
|
|
++ * // started.
|
|
|
++ * void vAFunction( TimerHandle_t xTimer )
|
|
|
++ * {
|
|
|
++ * if( xTimerIsTimerActive( xTimer ) != pdFALSE ) // or more simply and equivalently "if( xTimerIsTimerActive( xTimer ) )"
|
|
|
++ * {
|
|
|
++ * // xTimer is already active - delete it.
|
|
|
++ * xTimerDelete( xTimer );
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // xTimer is not active, change its period to 500ms. This will also
|
|
|
++ * // cause the timer to start. Block for a maximum of 100 ticks if the
|
|
|
++ * // change period command cannot immediately be sent to the timer
|
|
|
++ * // command queue.
|
|
|
++ * if( xTimerChangePeriod( xTimer, 500 / portTICK_PERIOD_MS, 100 ) == pdPASS )
|
|
|
++ * {
|
|
|
++ * // The command was successfully sent.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // The command could not be sent, even after waiting for 100 ticks
|
|
|
++ * // to pass. Take appropriate action here.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#define xTimerChangePeriod( xTimer, xNewPeriod, xTicksToWait ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_CHANGE_PERIOD, ( xNewPeriod ), NULL, ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerDelete( TimerHandle_t xTimer, TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * Timer functionality is provided by a timer service/daemon task. Many of the
|
|
|
++ * public FreeRTOS timer API functions send commands to the timer service task
|
|
|
++ * through a queue called the timer command queue. The timer command queue is
|
|
|
++ * private to the kernel itself and is not directly accessible to application
|
|
|
++ * code. The length of the timer command queue is set by the
|
|
|
++ * configTIMER_QUEUE_LENGTH configuration constant.
|
|
|
++ *
|
|
|
++ * xTimerDelete() deletes a timer that was previously created using the
|
|
|
++ * xTimerCreate() API function.
|
|
|
++ *
|
|
|
++ * The configUSE_TIMERS configuration constant must be set to 1 for
|
|
|
++ * xTimerDelete() to be available.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being deleted.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait Specifies the time, in ticks, that the calling task should
|
|
|
++ * be held in the Blocked state to wait for the delete command to be
|
|
|
++ * successfully sent to the timer command queue, should the queue already be
|
|
|
++ * full when xTimerDelete() was called. xTicksToWait is ignored if xTimerDelete()
|
|
|
++ * is called before the scheduler is started.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the delete command could not be sent to
|
|
|
++ * the timer command queue even after xTicksToWait ticks had passed. pdPASS will
|
|
|
++ * be returned if the command was successfully sent to the timer command queue.
|
|
|
++ * When the command is actually processed will depend on the priority of the
|
|
|
++ * timer service/daemon task relative to other tasks in the system. The timer
|
|
|
++ * service/daemon task priority is set by the configTIMER_TASK_PRIORITY
|
|
|
++ * configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ *
|
|
|
++ * See the xTimerChangePeriod() API function example usage scenario.
|
|
|
++ */
|
|
|
++#define xTimerDelete( xTimer, xTicksToWait ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_DELETE, 0U, NULL, ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerReset( TimerHandle_t xTimer, TickType_t xTicksToWait );
|
|
|
++ *
|
|
|
++ * Timer functionality is provided by a timer service/daemon task. Many of the
|
|
|
++ * public FreeRTOS timer API functions send commands to the timer service task
|
|
|
++ * through a queue called the timer command queue. The timer command queue is
|
|
|
++ * private to the kernel itself and is not directly accessible to application
|
|
|
++ * code. The length of the timer command queue is set by the
|
|
|
++ * configTIMER_QUEUE_LENGTH configuration constant.
|
|
|
++ *
|
|
|
++ * xTimerReset() re-starts a timer that was previously created using the
|
|
|
++ * xTimerCreate() API function. If the timer had already been started and was
|
|
|
++ * already in the active state, then xTimerReset() will cause the timer to
|
|
|
++ * re-evaluate its expiry time so that it is relative to when xTimerReset() was
|
|
|
++ * called. If the timer was in the dormant state then xTimerReset() has
|
|
|
++ * equivalent functionality to the xTimerStart() API function.
|
|
|
++ *
|
|
|
++ * Resetting a timer ensures the timer is in the active state. If the timer
|
|
|
++ * is not stopped, deleted, or reset in the mean time, the callback function
|
|
|
++ * associated with the timer will get called 'n' ticks after xTimerReset() was
|
|
|
++ * called, where 'n' is the timers defined period.
|
|
|
++ *
|
|
|
++ * It is valid to call xTimerReset() before the scheduler has been started, but
|
|
|
++ * when this is done the timer will not actually start until the scheduler is
|
|
|
++ * started, and the timers expiry time will be relative to when the scheduler is
|
|
|
++ * started, not relative to when xTimerReset() was called.
|
|
|
++ *
|
|
|
++ * The configUSE_TIMERS configuration constant must be set to 1 for xTimerReset()
|
|
|
++ * to be available.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being reset/started/restarted.
|
|
|
++ *
|
|
|
++ * @param xTicksToWait Specifies the time, in ticks, that the calling task should
|
|
|
++ * be held in the Blocked state to wait for the reset command to be successfully
|
|
|
++ * sent to the timer command queue, should the queue already be full when
|
|
|
++ * xTimerReset() was called. xTicksToWait is ignored if xTimerReset() is called
|
|
|
++ * before the scheduler is started.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the reset command could not be sent to
|
|
|
++ * the timer command queue even after xTicksToWait ticks had passed. pdPASS will
|
|
|
++ * be returned if the command was successfully sent to the timer command queue.
|
|
|
++ * When the command is actually processed will depend on the priority of the
|
|
|
++ * timer service/daemon task relative to other tasks in the system, although the
|
|
|
++ * timers expiry time is relative to when xTimerStart() is actually called. The
|
|
|
++ * timer service/daemon task priority is set by the configTIMER_TASK_PRIORITY
|
|
|
++ * configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // When a key is pressed, an LCD back-light is switched on. If 5 seconds pass
|
|
|
++ * // without a key being pressed, then the LCD back-light is switched off. In
|
|
|
++ * // this case, the timer is a one-shot timer.
|
|
|
++ *
|
|
|
++ * TimerHandle_t xBacklightTimer = NULL;
|
|
|
++ *
|
|
|
++ * // The callback function assigned to the one-shot timer. In this case the
|
|
|
++ * // parameter is not used.
|
|
|
++ * void vBacklightTimerCallback( TimerHandle_t pxTimer )
|
|
|
++ * {
|
|
|
++ * // The timer expired, therefore 5 seconds must have passed since a key
|
|
|
++ * // was pressed. Switch off the LCD back-light.
|
|
|
++ * vSetBacklightState( BACKLIGHT_OFF );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // The key press event handler.
|
|
|
++ * void vKeyPressEventHandler( char cKey )
|
|
|
++ * {
|
|
|
++ * // Ensure the LCD back-light is on, then reset the timer that is
|
|
|
++ * // responsible for turning the back-light off after 5 seconds of
|
|
|
++ * // key inactivity. Wait 10 ticks for the command to be successfully sent
|
|
|
++ * // if it cannot be sent immediately.
|
|
|
++ * vSetBacklightState( BACKLIGHT_ON );
|
|
|
++ * if( xTimerReset( xBacklightTimer, 100 ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The reset command was not executed successfully. Take appropriate
|
|
|
++ * // action here.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Perform the rest of the key processing here.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * void main( void )
|
|
|
++ * {
|
|
|
++ * int32_t x;
|
|
|
++ *
|
|
|
++ * // Create then start the one-shot timer that is responsible for turning
|
|
|
++ * // the back-light off if no keys are pressed within a 5 second period.
|
|
|
++ * xBacklightTimer = xTimerCreate( "BacklightTimer", // Just a text name, not used by the kernel.
|
|
|
++ * ( 5000 / portTICK_PERIOD_MS), // The timer period in ticks.
|
|
|
++ * pdFALSE, // The timer is a one-shot timer.
|
|
|
++ * 0, // The id is not used by the callback so can take any value.
|
|
|
++ * vBacklightTimerCallback // The callback function that switches the LCD back-light off.
|
|
|
++ * );
|
|
|
++ *
|
|
|
++ * if( xBacklightTimer == NULL )
|
|
|
++ * {
|
|
|
++ * // The timer was not created.
|
|
|
++ * }
|
|
|
++ * else
|
|
|
++ * {
|
|
|
++ * // Start the timer. No block time is specified, and even if one was
|
|
|
++ * // it would be ignored because the scheduler has not yet been
|
|
|
++ * // started.
|
|
|
++ * if( xTimerStart( xBacklightTimer, 0 ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The timer could not be set into the Active state.
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // ...
|
|
|
++ * // Create tasks here.
|
|
|
++ * // ...
|
|
|
++ *
|
|
|
++ * // Starting the scheduler will start the timer running as it has already
|
|
|
++ * // been set into the active state.
|
|
|
++ * vTaskStartScheduler();
|
|
|
++ *
|
|
|
++ * // Should not reach here.
|
|
|
++ * for( ;; );
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#define xTimerReset( xTimer, xTicksToWait ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_RESET, ( xTaskGetTickCount() ), NULL, ( xTicksToWait ) )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerStartFromISR( TimerHandle_t xTimer,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * A version of xTimerStart() that can be called from an interrupt service
|
|
|
++ * routine.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being started/restarted.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken The timer service/daemon task spends most
|
|
|
++ * of its time in the Blocked state, waiting for messages to arrive on the timer
|
|
|
++ * command queue. Calling xTimerStartFromISR() writes a message to the timer
|
|
|
++ * command queue, so has the potential to transition the timer service/daemon
|
|
|
++ * task out of the Blocked state. If calling xTimerStartFromISR() causes the
|
|
|
++ * timer service/daemon task to leave the Blocked state, and the timer service/
|
|
|
++ * daemon task has a priority equal to or greater than the currently executing
|
|
|
++ * task (the task that was interrupted), then *pxHigherPriorityTaskWoken will
|
|
|
++ * get set to pdTRUE internally within the xTimerStartFromISR() function. If
|
|
|
++ * xTimerStartFromISR() sets this value to pdTRUE then a context switch should
|
|
|
++ * be performed before the interrupt exits.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the start command could not be sent to
|
|
|
++ * the timer command queue. pdPASS will be returned if the command was
|
|
|
++ * successfully sent to the timer command queue. When the command is actually
|
|
|
++ * processed will depend on the priority of the timer service/daemon task
|
|
|
++ * relative to other tasks in the system, although the timers expiry time is
|
|
|
++ * relative to when xTimerStartFromISR() is actually called. The timer
|
|
|
++ * service/daemon task priority is set by the configTIMER_TASK_PRIORITY
|
|
|
++ * configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // This scenario assumes xBacklightTimer has already been created. When a
|
|
|
++ * // key is pressed, an LCD back-light is switched on. If 5 seconds pass
|
|
|
++ * // without a key being pressed, then the LCD back-light is switched off. In
|
|
|
++ * // this case, the timer is a one-shot timer, and unlike the example given for
|
|
|
++ * // the xTimerReset() function, the key press event handler is an interrupt
|
|
|
++ * // service routine.
|
|
|
++ *
|
|
|
++ * // The callback function assigned to the one-shot timer. In this case the
|
|
|
++ * // parameter is not used.
|
|
|
++ * void vBacklightTimerCallback( TimerHandle_t pxTimer )
|
|
|
++ * {
|
|
|
++ * // The timer expired, therefore 5 seconds must have passed since a key
|
|
|
++ * // was pressed. Switch off the LCD back-light.
|
|
|
++ * vSetBacklightState( BACKLIGHT_OFF );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // The key press interrupt service routine.
|
|
|
++ * void vKeyPressEventInterruptHandler( void )
|
|
|
++ * {
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Ensure the LCD back-light is on, then restart the timer that is
|
|
|
++ * // responsible for turning the back-light off after 5 seconds of
|
|
|
++ * // key inactivity. This is an interrupt service routine so can only
|
|
|
++ * // call FreeRTOS API functions that end in "FromISR".
|
|
|
++ * vSetBacklightState( BACKLIGHT_ON );
|
|
|
++ *
|
|
|
++ * // xTimerStartFromISR() or xTimerResetFromISR() could be called here
|
|
|
++ * // as both cause the timer to re-calculate its expiry time.
|
|
|
++ * // xHigherPriorityTaskWoken was initialised to pdFALSE when it was
|
|
|
++ * // declared (in this function).
|
|
|
++ * if( xTimerStartFromISR( xBacklightTimer, &xHigherPriorityTaskWoken ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The start command was not executed successfully. Take appropriate
|
|
|
++ * // action here.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Perform the rest of the key processing here.
|
|
|
++ *
|
|
|
++ * // If xHigherPriorityTaskWoken equals pdTRUE, then a context switch
|
|
|
++ * // should be performed. The syntax required to perform a context switch
|
|
|
++ * // from inside an ISR varies from port to port, and from compiler to
|
|
|
++ * // compiler. Inspect the demos for the port you are using to find the
|
|
|
++ * // actual syntax required.
|
|
|
++ * if( xHigherPriorityTaskWoken != pdFALSE )
|
|
|
++ * {
|
|
|
++ * // Call the interrupt safe yield function here (actual function
|
|
|
++ * // depends on the FreeRTOS port being used).
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#define xTimerStartFromISR( xTimer, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_START_FROM_ISR, ( xTaskGetTickCountFromISR() ), ( pxHigherPriorityTaskWoken ), 0U )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerStopFromISR( TimerHandle_t xTimer,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * A version of xTimerStop() that can be called from an interrupt service
|
|
|
++ * routine.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being stopped.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken The timer service/daemon task spends most
|
|
|
++ * of its time in the Blocked state, waiting for messages to arrive on the timer
|
|
|
++ * command queue. Calling xTimerStopFromISR() writes a message to the timer
|
|
|
++ * command queue, so has the potential to transition the timer service/daemon
|
|
|
++ * task out of the Blocked state. If calling xTimerStopFromISR() causes the
|
|
|
++ * timer service/daemon task to leave the Blocked state, and the timer service/
|
|
|
++ * daemon task has a priority equal to or greater than the currently executing
|
|
|
++ * task (the task that was interrupted), then *pxHigherPriorityTaskWoken will
|
|
|
++ * get set to pdTRUE internally within the xTimerStopFromISR() function. If
|
|
|
++ * xTimerStopFromISR() sets this value to pdTRUE then a context switch should
|
|
|
++ * be performed before the interrupt exits.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the stop command could not be sent to
|
|
|
++ * the timer command queue. pdPASS will be returned if the command was
|
|
|
++ * successfully sent to the timer command queue. When the command is actually
|
|
|
++ * processed will depend on the priority of the timer service/daemon task
|
|
|
++ * relative to other tasks in the system. The timer service/daemon task
|
|
|
++ * priority is set by the configTIMER_TASK_PRIORITY configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // This scenario assumes xTimer has already been created and started. When
|
|
|
++ * // an interrupt occurs, the timer should be simply stopped.
|
|
|
++ *
|
|
|
++ * // The interrupt service routine that stops the timer.
|
|
|
++ * void vAnExampleInterruptServiceRoutine( void )
|
|
|
++ * {
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // The interrupt has occurred - simply stop the timer.
|
|
|
++ * // xHigherPriorityTaskWoken was set to pdFALSE where it was defined
|
|
|
++ * // (within this function). As this is an interrupt service routine, only
|
|
|
++ * // FreeRTOS API functions that end in "FromISR" can be used.
|
|
|
++ * if( xTimerStopFromISR( xTimer, &xHigherPriorityTaskWoken ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The stop command was not executed successfully. Take appropriate
|
|
|
++ * // action here.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // If xHigherPriorityTaskWoken equals pdTRUE, then a context switch
|
|
|
++ * // should be performed. The syntax required to perform a context switch
|
|
|
++ * // from inside an ISR varies from port to port, and from compiler to
|
|
|
++ * // compiler. Inspect the demos for the port you are using to find the
|
|
|
++ * // actual syntax required.
|
|
|
++ * if( xHigherPriorityTaskWoken != pdFALSE )
|
|
|
++ * {
|
|
|
++ * // Call the interrupt safe yield function here (actual function
|
|
|
++ * // depends on the FreeRTOS port being used).
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#define xTimerStopFromISR( xTimer, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_STOP_FROM_ISR, 0, ( pxHigherPriorityTaskWoken ), 0U )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerChangePeriodFromISR( TimerHandle_t xTimer,
|
|
|
++ * TickType_t xNewPeriod,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * A version of xTimerChangePeriod() that can be called from an interrupt
|
|
|
++ * service routine.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer that is having its period changed.
|
|
|
++ *
|
|
|
++ * @param xNewPeriod The new period for xTimer. Timer periods are specified in
|
|
|
++ * tick periods, so the constant portTICK_PERIOD_MS can be used to convert a time
|
|
|
++ * that has been specified in milliseconds. For example, if the timer must
|
|
|
++ * expire after 100 ticks, then xNewPeriod should be set to 100. Alternatively,
|
|
|
++ * if the timer must expire after 500ms, then xNewPeriod can be set to
|
|
|
++ * ( 500 / portTICK_PERIOD_MS ) provided configTICK_RATE_HZ is less than
|
|
|
++ * or equal to 1000.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken The timer service/daemon task spends most
|
|
|
++ * of its time in the Blocked state, waiting for messages to arrive on the timer
|
|
|
++ * command queue. Calling xTimerChangePeriodFromISR() writes a message to the
|
|
|
++ * timer command queue, so has the potential to transition the timer service/
|
|
|
++ * daemon task out of the Blocked state. If calling xTimerChangePeriodFromISR()
|
|
|
++ * causes the timer service/daemon task to leave the Blocked state, and the
|
|
|
++ * timer service/daemon task has a priority equal to or greater than the
|
|
|
++ * currently executing task (the task that was interrupted), then
|
|
|
++ * *pxHigherPriorityTaskWoken will get set to pdTRUE internally within the
|
|
|
++ * xTimerChangePeriodFromISR() function. If xTimerChangePeriodFromISR() sets
|
|
|
++ * this value to pdTRUE then a context switch should be performed before the
|
|
|
++ * interrupt exits.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the command to change the timers period
|
|
|
++ * could not be sent to the timer command queue. pdPASS will be returned if the
|
|
|
++ * command was successfully sent to the timer command queue. When the command
|
|
|
++ * is actually processed will depend on the priority of the timer service/daemon
|
|
|
++ * task relative to other tasks in the system. The timer service/daemon task
|
|
|
++ * priority is set by the configTIMER_TASK_PRIORITY configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // This scenario assumes xTimer has already been created and started. When
|
|
|
++ * // an interrupt occurs, the period of xTimer should be changed to 500ms.
|
|
|
++ *
|
|
|
++ * // The interrupt service routine that changes the period of xTimer.
|
|
|
++ * void vAnExampleInterruptServiceRoutine( void )
|
|
|
++ * {
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // The interrupt has occurred - change the period of xTimer to 500ms.
|
|
|
++ * // xHigherPriorityTaskWoken was set to pdFALSE where it was defined
|
|
|
++ * // (within this function). As this is an interrupt service routine, only
|
|
|
++ * // FreeRTOS API functions that end in "FromISR" can be used.
|
|
|
++ * if( xTimerChangePeriodFromISR( xTimer, &xHigherPriorityTaskWoken ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The command to change the timers period was not executed
|
|
|
++ * // successfully. Take appropriate action here.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // If xHigherPriorityTaskWoken equals pdTRUE, then a context switch
|
|
|
++ * // should be performed. The syntax required to perform a context switch
|
|
|
++ * // from inside an ISR varies from port to port, and from compiler to
|
|
|
++ * // compiler. Inspect the demos for the port you are using to find the
|
|
|
++ * // actual syntax required.
|
|
|
++ * if( xHigherPriorityTaskWoken != pdFALSE )
|
|
|
++ * {
|
|
|
++ * // Call the interrupt safe yield function here (actual function
|
|
|
++ * // depends on the FreeRTOS port being used).
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#define xTimerChangePeriodFromISR( xTimer, xNewPeriod, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_CHANGE_PERIOD_FROM_ISR, ( xNewPeriod ), ( pxHigherPriorityTaskWoken ), 0U )
|
|
|
++
|
|
|
++/**
|
|
|
++ * BaseType_t xTimerResetFromISR( TimerHandle_t xTimer,
|
|
|
++ * BaseType_t *pxHigherPriorityTaskWoken );
|
|
|
++ *
|
|
|
++ * A version of xTimerReset() that can be called from an interrupt service
|
|
|
++ * routine.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer that is to be started, reset, or
|
|
|
++ * restarted.
|
|
|
++ *
|
|
|
++ * @param pxHigherPriorityTaskWoken The timer service/daemon task spends most
|
|
|
++ * of its time in the Blocked state, waiting for messages to arrive on the timer
|
|
|
++ * command queue. Calling xTimerResetFromISR() writes a message to the timer
|
|
|
++ * command queue, so has the potential to transition the timer service/daemon
|
|
|
++ * task out of the Blocked state. If calling xTimerResetFromISR() causes the
|
|
|
++ * timer service/daemon task to leave the Blocked state, and the timer service/
|
|
|
++ * daemon task has a priority equal to or greater than the currently executing
|
|
|
++ * task (the task that was interrupted), then *pxHigherPriorityTaskWoken will
|
|
|
++ * get set to pdTRUE internally within the xTimerResetFromISR() function. If
|
|
|
++ * xTimerResetFromISR() sets this value to pdTRUE then a context switch should
|
|
|
++ * be performed before the interrupt exits.
|
|
|
++ *
|
|
|
++ * @return pdFAIL will be returned if the reset command could not be sent to
|
|
|
++ * the timer command queue. pdPASS will be returned if the command was
|
|
|
++ * successfully sent to the timer command queue. When the command is actually
|
|
|
++ * processed will depend on the priority of the timer service/daemon task
|
|
|
++ * relative to other tasks in the system, although the timers expiry time is
|
|
|
++ * relative to when xTimerResetFromISR() is actually called. The timer service/daemon
|
|
|
++ * task priority is set by the configTIMER_TASK_PRIORITY configuration constant.
|
|
|
++ *
|
|
|
++ * Example usage:
|
|
|
++ * @verbatim
|
|
|
++ * // This scenario assumes xBacklightTimer has already been created. When a
|
|
|
++ * // key is pressed, an LCD back-light is switched on. If 5 seconds pass
|
|
|
++ * // without a key being pressed, then the LCD back-light is switched off. In
|
|
|
++ * // this case, the timer is a one-shot timer, and unlike the example given for
|
|
|
++ * // the xTimerReset() function, the key press event handler is an interrupt
|
|
|
++ * // service routine.
|
|
|
++ *
|
|
|
++ * // The callback function assigned to the one-shot timer. In this case the
|
|
|
++ * // parameter is not used.
|
|
|
++ * void vBacklightTimerCallback( TimerHandle_t pxTimer )
|
|
|
++ * {
|
|
|
++ * // The timer expired, therefore 5 seconds must have passed since a key
|
|
|
++ * // was pressed. Switch off the LCD back-light.
|
|
|
++ * vSetBacklightState( BACKLIGHT_OFF );
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // The key press interrupt service routine.
|
|
|
++ * void vKeyPressEventInterruptHandler( void )
|
|
|
++ * {
|
|
|
++ * BaseType_t xHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ *
|
|
|
++ * // Ensure the LCD back-light is on, then reset the timer that is
|
|
|
++ * // responsible for turning the back-light off after 5 seconds of
|
|
|
++ * // key inactivity. This is an interrupt service routine so can only
|
|
|
++ * // call FreeRTOS API functions that end in "FromISR".
|
|
|
++ * vSetBacklightState( BACKLIGHT_ON );
|
|
|
++ *
|
|
|
++ * // xTimerStartFromISR() or xTimerResetFromISR() could be called here
|
|
|
++ * // as both cause the timer to re-calculate its expiry time.
|
|
|
++ * // xHigherPriorityTaskWoken was initialised to pdFALSE when it was
|
|
|
++ * // declared (in this function).
|
|
|
++ * if( xTimerResetFromISR( xBacklightTimer, &xHigherPriorityTaskWoken ) != pdPASS )
|
|
|
++ * {
|
|
|
++ * // The reset command was not executed successfully. Take appropriate
|
|
|
++ * // action here.
|
|
|
++ * }
|
|
|
++ *
|
|
|
++ * // Perform the rest of the key processing here.
|
|
|
++ *
|
|
|
++ * // If xHigherPriorityTaskWoken equals pdTRUE, then a context switch
|
|
|
++ * // should be performed. The syntax required to perform a context switch
|
|
|
++ * // from inside an ISR varies from port to port, and from compiler to
|
|
|
++ * // compiler. Inspect the demos for the port you are using to find the
|
|
|
++ * // actual syntax required.
|
|
|
++ * if( xHigherPriorityTaskWoken != pdFALSE )
|
|
|
++ * {
|
|
|
++ * // Call the interrupt safe yield function here (actual function
|
|
|
++ * // depends on the FreeRTOS port being used).
|
|
|
++ * }
|
|
|
++ * }
|
|
|
++ * @endverbatim
|
|
|
++ */
|
|
|
++#define xTimerResetFromISR( xTimer, pxHigherPriorityTaskWoken ) \
|
|
|
++ xTimerGenericCommand( ( xTimer ), tmrCOMMAND_RESET_FROM_ISR, ( xTaskGetTickCountFromISR() ), ( pxHigherPriorityTaskWoken ), 0U )
|
|
|
++
|
|
|
++/**
|
|
|
++ * const char * const pcTimerGetName( TimerHandle_t xTimer );
|
|
|
++ *
|
|
|
++ * Returns the name that was assigned to a timer when the timer was created.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being queried.
|
|
|
++ *
|
|
|
++ * @return The name assigned to the timer specified by the xTimer parameter.
|
|
|
++ */
|
|
|
++const char * pcTimerGetName( TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/**
|
|
|
++ * void vTimerSetReloadMode( TimerHandle_t xTimer, const UBaseType_t uxAutoReload );
|
|
|
++ *
|
|
|
++ * Updates a timer to be either an auto-reload timer, in which case the timer
|
|
|
++ * automatically resets itself each time it expires, or a one-shot timer, in
|
|
|
++ * which case the timer will only expire once unless it is manually restarted.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being updated.
|
|
|
++ *
|
|
|
++ * @param uxAutoReload If uxAutoReload is set to pdTRUE then the timer will
|
|
|
++ * expire repeatedly with a frequency set by the timer's period (see the
|
|
|
++ * xTimerPeriodInTicks parameter of the xTimerCreate() API function). If
|
|
|
++ * uxAutoReload is set to pdFALSE then the timer will be a one-shot timer and
|
|
|
++ * enter the dormant state after it expires.
|
|
|
++ */
|
|
|
++void vTimerSetReloadMode( TimerHandle_t xTimer,
|
|
|
++ const UBaseType_t uxAutoReload );
|
|
|
++
|
|
|
++/**
|
|
|
++ * UBaseType_t uxTimerGetReloadMode( TimerHandle_t xTimer );
|
|
|
++ *
|
|
|
++ * Queries a timer to determine if it is an auto-reload timer, in which case the timer
|
|
|
++ * automatically resets itself each time it expires, or a one-shot timer, in
|
|
|
++ * which case the timer will only expire once unless it is manually restarted.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being queried.
|
|
|
++ *
|
|
|
++ * @return If the timer is an auto-reload timer then pdTRUE is returned, otherwise
|
|
|
++ * pdFALSE is returned.
|
|
|
++ */
|
|
|
++UBaseType_t uxTimerGetReloadMode( TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/**
|
|
|
++ * TickType_t xTimerGetPeriod( TimerHandle_t xTimer );
|
|
|
++ *
|
|
|
++ * Returns the period of a timer.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being queried.
|
|
|
++ *
|
|
|
++ * @return The period of the timer in ticks.
|
|
|
++ */
|
|
|
++TickType_t xTimerGetPeriod( TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/**
|
|
|
++ * TickType_t xTimerGetExpiryTime( TimerHandle_t xTimer );
|
|
|
++ *
|
|
|
++ * Returns the time in ticks at which the timer will expire. If this is less
|
|
|
++ * than the current tick count then the expiry time has overflowed from the
|
|
|
++ * current time.
|
|
|
++ *
|
|
|
++ * @param xTimer The handle of the timer being queried.
|
|
|
++ *
|
|
|
++ * @return If the timer is running then the time in ticks at which the timer
|
|
|
++ * will next expire is returned. If the timer is not running then the return
|
|
|
++ * value is undefined.
|
|
|
++ */
|
|
|
++TickType_t xTimerGetExpiryTime( TimerHandle_t xTimer );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Functions beyond this part are not part of the public API and are intended
|
|
|
++ * for use by the kernel only.
|
|
|
++ */
|
|
|
++BaseType_t xTimerGenericCommand( TimerHandle_t xTimer,
|
|
|
++ const BaseType_t xCommandID,
|
|
|
++ const TickType_t xOptionalValue,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken,
|
|
|
++ const TickType_t xTicksToWait );
|
|
|
++
|
|
|
++/* *INDENT-OFF* */
|
|
|
++#ifdef __cplusplus
|
|
|
++ }
|
|
|
++#endif
|
|
|
++/* *INDENT-ON* */
|
|
|
++#endif /* TIMERS_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/list.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/list.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..5eec523162
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/list.c
|
|
|
+@@ -0,0 +1,213 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.3
|
|
|
++ * Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++/* Defining MPU_WRAPPERS_INCLUDED_FROM_API_FILE prevents task.h from redefining
|
|
|
++ * all the API functions to use the MPU wrappers. That should only be done when
|
|
|
++ * task.h is included from an application file. */
|
|
|
++#define MPU_WRAPPERS_INCLUDED_FROM_API_FILE
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "list.h"
|
|
|
++
|
|
|
++/* Lint e9021, e961 and e750 are suppressed as a MISRA exception justified
|
|
|
++ * because the MPU ports require MPU_WRAPPERS_INCLUDED_FROM_API_FILE to be
|
|
|
++ * defined for the header files above, but not in this file, in order to
|
|
|
++ * generate the correct privileged Vs unprivileged linkage and placement. */
|
|
|
++#undef MPU_WRAPPERS_INCLUDED_FROM_API_FILE /*lint !e961 !e750 !e9021. */
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++* PUBLIC LIST API documented in list.h
|
|
|
++*----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vListInitialise( List_t * const pxList )
|
|
|
++{
|
|
|
++ /* The list structure contains a list item which is used to mark the
|
|
|
++ * end of the list. To initialise the list the list end is inserted
|
|
|
++ * as the only list entry. */
|
|
|
++ pxList->pxIndex = ( ListItem_t * ) &( pxList->xListEnd ); /*lint !e826 !e740 !e9087 The mini list structure is used as the list end to save RAM. This is checked and valid. */
|
|
|
++
|
|
|
++ /* The list end value is the highest possible value in the list to
|
|
|
++ * ensure it remains at the end of the list. */
|
|
|
++ pxList->xListEnd.xItemValue = portMAX_DELAY;
|
|
|
++
|
|
|
++ /* The list end next and previous pointers point to itself so we know
|
|
|
++ * when the list is empty. */
|
|
|
++ pxList->xListEnd.pxNext = ( ListItem_t * ) &( pxList->xListEnd ); /*lint !e826 !e740 !e9087 The mini list structure is used as the list end to save RAM. This is checked and valid. */
|
|
|
++ pxList->xListEnd.pxPrevious = ( ListItem_t * ) &( pxList->xListEnd ); /*lint !e826 !e740 !e9087 The mini list structure is used as the list end to save RAM. This is checked and valid. */
|
|
|
++
|
|
|
++ pxList->uxNumberOfItems = ( UBaseType_t ) 0U;
|
|
|
++
|
|
|
++ /* Write known values into the list if
|
|
|
++ * configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++ listSET_LIST_INTEGRITY_CHECK_1_VALUE( pxList );
|
|
|
++ listSET_LIST_INTEGRITY_CHECK_2_VALUE( pxList );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vListInitialiseItem( ListItem_t * const pxItem )
|
|
|
++{
|
|
|
++ /* Make sure the list item is not recorded as being on a list. */
|
|
|
++ pxItem->pxContainer = NULL;
|
|
|
++
|
|
|
++ /* Write known values into the list item if
|
|
|
++ * configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
|
|
|
++ listSET_FIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE( pxItem );
|
|
|
++ listSET_SECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE( pxItem );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vListInsertEnd( List_t * const pxList,
|
|
|
++ ListItem_t * const pxNewListItem )
|
|
|
++{
|
|
|
++ ListItem_t * const pxIndex = pxList->pxIndex;
|
|
|
++
|
|
|
++ /* Only effective when configASSERT() is also defined, these tests may catch
|
|
|
++ * the list data structures being overwritten in memory. They will not catch
|
|
|
++ * data errors caused by incorrect configuration or use of FreeRTOS. */
|
|
|
++ listTEST_LIST_INTEGRITY( pxList );
|
|
|
++ listTEST_LIST_ITEM_INTEGRITY( pxNewListItem );
|
|
|
++
|
|
|
++ /* Insert a new list item into pxList, but rather than sort the list,
|
|
|
++ * makes the new list item the last item to be removed by a call to
|
|
|
++ * listGET_OWNER_OF_NEXT_ENTRY(). */
|
|
|
++ pxNewListItem->pxNext = pxIndex;
|
|
|
++ pxNewListItem->pxPrevious = pxIndex->pxPrevious;
|
|
|
++
|
|
|
++ /* Only used during decision coverage testing. */
|
|
|
++ mtCOVERAGE_TEST_DELAY();
|
|
|
++
|
|
|
++ pxIndex->pxPrevious->pxNext = pxNewListItem;
|
|
|
++ pxIndex->pxPrevious = pxNewListItem;
|
|
|
++
|
|
|
++ /* Remember which list the item is in. */
|
|
|
++ pxNewListItem->pxContainer = pxList;
|
|
|
++
|
|
|
++ ( pxList->uxNumberOfItems )++;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vListInsert( List_t * const pxList,
|
|
|
++ ListItem_t * const pxNewListItem )
|
|
|
++{
|
|
|
++ ListItem_t * pxIterator;
|
|
|
++ const TickType_t xValueOfInsertion = pxNewListItem->xItemValue;
|
|
|
++
|
|
|
++ /* Only effective when configASSERT() is also defined, these tests may catch
|
|
|
++ * the list data structures being overwritten in memory. They will not catch
|
|
|
++ * data errors caused by incorrect configuration or use of FreeRTOS. */
|
|
|
++ listTEST_LIST_INTEGRITY( pxList );
|
|
|
++ listTEST_LIST_ITEM_INTEGRITY( pxNewListItem );
|
|
|
++
|
|
|
++ /* Insert the new list item into the list, sorted in xItemValue order.
|
|
|
++ *
|
|
|
++ * If the list already contains a list item with the same item value then the
|
|
|
++ * new list item should be placed after it. This ensures that TCBs which are
|
|
|
++ * stored in ready lists (all of which have the same xItemValue value) get a
|
|
|
++ * share of the CPU. However, if the xItemValue is the same as the back marker
|
|
|
++ * the iteration loop below will not end. Therefore the value is checked
|
|
|
++ * first, and the algorithm slightly modified if necessary. */
|
|
|
++ if( xValueOfInsertion == portMAX_DELAY )
|
|
|
++ {
|
|
|
++ pxIterator = pxList->xListEnd.pxPrevious;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ /* *** NOTE ***********************************************************
|
|
|
++ * If you find your application is crashing here then likely causes are
|
|
|
++ * listed below. In addition see https://www.FreeRTOS.org/FAQHelp.html for
|
|
|
++ * more tips, and ensure configASSERT() is defined!
|
|
|
++ * https://www.FreeRTOS.org/a00110.html#configASSERT
|
|
|
++ *
|
|
|
++ * 1) Stack overflow -
|
|
|
++ * see https://www.FreeRTOS.org/Stacks-and-stack-overflow-checking.html
|
|
|
++ * 2) Incorrect interrupt priority assignment, especially on Cortex-M
|
|
|
++ * parts where numerically high priority values denote low actual
|
|
|
++ * interrupt priorities, which can seem counter intuitive. See
|
|
|
++ * https://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html and the definition
|
|
|
++ * of configMAX_SYSCALL_INTERRUPT_PRIORITY on
|
|
|
++ * https://www.FreeRTOS.org/a00110.html
|
|
|
++ * 3) Calling an API function from within a critical section or when
|
|
|
++ * the scheduler is suspended, or calling an API function that does
|
|
|
++ * not end in "FromISR" from an interrupt.
|
|
|
++ * 4) Using a queue or semaphore before it has been initialised or
|
|
|
++ * before the scheduler has been started (are interrupts firing
|
|
|
++ * before vTaskStartScheduler() has been called?).
|
|
|
++ * 5) If the FreeRTOS port supports interrupt nesting then ensure that
|
|
|
++ * the priority of the tick interrupt is at or below
|
|
|
++ * configMAX_SYSCALL_INTERRUPT_PRIORITY.
|
|
|
++ **********************************************************************/
|
|
|
++
|
|
|
++ for( pxIterator = ( ListItem_t * ) &( pxList->xListEnd ); pxIterator->pxNext->xItemValue <= xValueOfInsertion; pxIterator = pxIterator->pxNext ) /*lint !e826 !e740 !e9087 The mini list structure is used as the list end to save RAM. This is checked and valid. *//*lint !e440 The iterator moves to a different value, not xValueOfInsertion. */
|
|
|
++ {
|
|
|
++ /* There is nothing to do here, just iterating to the wanted
|
|
|
++ * insertion position. */
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ pxNewListItem->pxNext = pxIterator->pxNext;
|
|
|
++ pxNewListItem->pxNext->pxPrevious = pxNewListItem;
|
|
|
++ pxNewListItem->pxPrevious = pxIterator;
|
|
|
++ pxIterator->pxNext = pxNewListItem;
|
|
|
++
|
|
|
++ /* Remember which list the item is in. This allows fast removal of the
|
|
|
++ * item later. */
|
|
|
++ pxNewListItem->pxContainer = pxList;
|
|
|
++
|
|
|
++ ( pxList->uxNumberOfItems )++;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++UBaseType_t uxListRemove( ListItem_t * const pxItemToRemove )
|
|
|
++{
|
|
|
++/* The list item knows which list it is in. Obtain the list from the list
|
|
|
++ * item. */
|
|
|
++ List_t * const pxList = pxItemToRemove->pxContainer;
|
|
|
++
|
|
|
++ pxItemToRemove->pxNext->pxPrevious = pxItemToRemove->pxPrevious;
|
|
|
++ pxItemToRemove->pxPrevious->pxNext = pxItemToRemove->pxNext;
|
|
|
++
|
|
|
++ /* Only used during decision coverage testing. */
|
|
|
++ mtCOVERAGE_TEST_DELAY();
|
|
|
++
|
|
|
++ /* Make sure the index is left pointing to a valid item. */
|
|
|
++ if( pxList->pxIndex == pxItemToRemove )
|
|
|
++ {
|
|
|
++ pxList->pxIndex = pxItemToRemove->pxPrevious;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ mtCOVERAGE_TEST_MARKER();
|
|
|
++ }
|
|
|
++
|
|
|
++ pxItemToRemove->pxContainer = NULL;
|
|
|
++ ( pxList->uxNumberOfItems )--;
|
|
|
++
|
|
|
++ return pxList->uxNumberOfItems;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_1.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_1.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..cebc240892
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_1.c
|
|
|
+@@ -0,0 +1,145 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++/*
|
|
|
++ * The simplest possible implementation of pvPortMalloc(). Note that this
|
|
|
++ * implementation does NOT allow allocated memory to be freed again.
|
|
|
++ *
|
|
|
++ * See heap_2.c, heap_3.c and heap_4.c for alternative implementations, and the
|
|
|
++ * memory management pages of https://www.FreeRTOS.org for more information.
|
|
|
++ */
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 0 )
|
|
|
++ #error This file must not be used if configSUPPORT_DYNAMIC_ALLOCATION is 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* A few bytes might be lost to byte aligning the heap start address. */
|
|
|
++#define configADJUSTED_HEAP_SIZE ( configTOTAL_HEAP_SIZE - portBYTE_ALIGNMENT )
|
|
|
++
|
|
|
++/* Allocate the memory for the heap. */
|
|
|
++#if ( configAPPLICATION_ALLOCATED_HEAP == 1 )
|
|
|
++
|
|
|
++/* The application writer has already defined the array used for the RTOS
|
|
|
++* heap - probably so it can be placed in a special segment or address. */
|
|
|
++ extern uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
|
|
|
++#else
|
|
|
++ static uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
|
|
|
++#endif /* configAPPLICATION_ALLOCATED_HEAP */
|
|
|
++
|
|
|
++/* Index into the ucHeap array. */
|
|
|
++static size_t xNextFreeByte = ( size_t ) 0;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void * pvPortMalloc( size_t xWantedSize )
|
|
|
++{
|
|
|
++ void * pvReturn = NULL;
|
|
|
++ static uint8_t * pucAlignedHeap = NULL;
|
|
|
++
|
|
|
++ /* Ensure that blocks are always aligned. */
|
|
|
++ #if ( portBYTE_ALIGNMENT != 1 )
|
|
|
++ {
|
|
|
++ if( xWantedSize & portBYTE_ALIGNMENT_MASK )
|
|
|
++ {
|
|
|
++ /* Byte alignment required. Check for overflow. */
|
|
|
++ if ( (xWantedSize + ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) )) > xWantedSize )
|
|
|
++ {
|
|
|
++ xWantedSize += ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ if( pucAlignedHeap == NULL )
|
|
|
++ {
|
|
|
++ /* Ensure the heap starts on a correctly aligned boundary. */
|
|
|
++ pucAlignedHeap = ( uint8_t * ) ( ( ( portPOINTER_SIZE_TYPE ) & ucHeap[ portBYTE_ALIGNMENT - 1 ] ) & ( ~( ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) ) );
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Check there is enough room left for the allocation and. */
|
|
|
++ if( ( xWantedSize > 0 ) && /* valid size */
|
|
|
++ ( ( xNextFreeByte + xWantedSize ) < configADJUSTED_HEAP_SIZE ) &&
|
|
|
++ ( ( xNextFreeByte + xWantedSize ) > xNextFreeByte ) ) /* Check for overflow. */
|
|
|
++ {
|
|
|
++ /* Return the next free byte then increment the index past this
|
|
|
++ * block. */
|
|
|
++ pvReturn = pucAlignedHeap + xNextFreeByte;
|
|
|
++ xNextFreeByte += xWantedSize;
|
|
|
++ }
|
|
|
++
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++
|
|
|
++ #if ( configUSE_MALLOC_FAILED_HOOK == 1 )
|
|
|
++ {
|
|
|
++ if( pvReturn == NULL )
|
|
|
++ {
|
|
|
++ extern void vApplicationMallocFailedHook( void );
|
|
|
++ vApplicationMallocFailedHook();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ return pvReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortFree( void * pv )
|
|
|
++{
|
|
|
++ /* Memory cannot be freed using this scheme. See heap_2.c, heap_3.c and
|
|
|
++ * heap_4.c for alternative implementations, and the memory management pages of
|
|
|
++ * https://www.FreeRTOS.org for more information. */
|
|
|
++ ( void ) pv;
|
|
|
++
|
|
|
++ /* Force an assert as it is invalid to call this function. */
|
|
|
++ configASSERT( pv == NULL );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortInitialiseBlocks( void )
|
|
|
++{
|
|
|
++ /* Only required when static memory is not cleared. */
|
|
|
++ xNextFreeByte = ( size_t ) 0;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++size_t xPortGetFreeHeapSize( void )
|
|
|
++{
|
|
|
++ return( configADJUSTED_HEAP_SIZE - xNextFreeByte );
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_2.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_2.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..00a68b26b4
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_2.c
|
|
|
+@@ -0,0 +1,277 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/*
|
|
|
++ * A sample implementation of pvPortMalloc() and vPortFree() that permits
|
|
|
++ * allocated blocks to be freed, but does not combine adjacent free blocks
|
|
|
++ * into a single larger block (and so will fragment memory). See heap_4.c for
|
|
|
++ * an equivalent that does combine adjacent blocks into single larger blocks.
|
|
|
++ *
|
|
|
++ * See heap_1.c, heap_3.c and heap_4.c for alternative implementations, and the
|
|
|
++ * memory management pages of https://www.FreeRTOS.org for more information.
|
|
|
++ */
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 0 )
|
|
|
++ #error This file must not be used if configSUPPORT_DYNAMIC_ALLOCATION is 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* A few bytes might be lost to byte aligning the heap start address. */
|
|
|
++#define configADJUSTED_HEAP_SIZE ( configTOTAL_HEAP_SIZE - portBYTE_ALIGNMENT )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Initialises the heap structures before their first use.
|
|
|
++ */
|
|
|
++static void prvHeapInit( void );
|
|
|
++
|
|
|
++/* Allocate the memory for the heap. */
|
|
|
++#if ( configAPPLICATION_ALLOCATED_HEAP == 1 )
|
|
|
++
|
|
|
++/* The application writer has already defined the array used for the RTOS
|
|
|
++* heap - probably so it can be placed in a special segment or address. */
|
|
|
++ extern uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
|
|
|
++#else
|
|
|
++ static uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
|
|
|
++#endif /* configAPPLICATION_ALLOCATED_HEAP */
|
|
|
++
|
|
|
++
|
|
|
++/* Define the linked list structure. This is used to link free blocks in order
|
|
|
++ * of their size. */
|
|
|
++typedef struct A_BLOCK_LINK
|
|
|
++{
|
|
|
++ struct A_BLOCK_LINK * pxNextFreeBlock; /*<< The next free block in the list. */
|
|
|
++ size_t xBlockSize; /*<< The size of the free block. */
|
|
|
++} BlockLink_t;
|
|
|
++
|
|
|
++
|
|
|
++static const uint16_t heapSTRUCT_SIZE = ( ( sizeof( BlockLink_t ) + ( portBYTE_ALIGNMENT - 1 ) ) & ~portBYTE_ALIGNMENT_MASK );
|
|
|
++#define heapMINIMUM_BLOCK_SIZE ( ( size_t ) ( heapSTRUCT_SIZE * 2 ) )
|
|
|
++
|
|
|
++/* Create a couple of list links to mark the start and end of the list. */
|
|
|
++static BlockLink_t xStart, xEnd;
|
|
|
++
|
|
|
++/* Keeps track of the number of free bytes remaining, but says nothing about
|
|
|
++ * fragmentation. */
|
|
|
++static size_t xFreeBytesRemaining = configADJUSTED_HEAP_SIZE;
|
|
|
++
|
|
|
++/* STATIC FUNCTIONS ARE DEFINED AS MACROS TO MINIMIZE THE FUNCTION CALL DEPTH. */
|
|
|
++
|
|
|
++/*
|
|
|
++ * Insert a block into the list of free blocks - which is ordered by size of
|
|
|
++ * the block. Small blocks at the start of the list and large blocks at the end
|
|
|
++ * of the list.
|
|
|
++ */
|
|
|
++#define prvInsertBlockIntoFreeList( pxBlockToInsert ) \
|
|
|
++ { \
|
|
|
++ BlockLink_t * pxIterator; \
|
|
|
++ size_t xBlockSize; \
|
|
|
++ \
|
|
|
++ xBlockSize = pxBlockToInsert->xBlockSize; \
|
|
|
++ \
|
|
|
++ /* Iterate through the list until a block is found that has a larger size */ \
|
|
|
++ /* than the block we are inserting. */ \
|
|
|
++ for( pxIterator = &xStart; pxIterator->pxNextFreeBlock->xBlockSize < xBlockSize; pxIterator = pxIterator->pxNextFreeBlock ) \
|
|
|
++ { \
|
|
|
++ /* There is nothing to do here - just iterate to the correct position. */ \
|
|
|
++ } \
|
|
|
++ \
|
|
|
++ /* Update the list to include the block being inserted in the correct */ \
|
|
|
++ /* position. */ \
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxIterator->pxNextFreeBlock; \
|
|
|
++ pxIterator->pxNextFreeBlock = pxBlockToInsert; \
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void * pvPortMalloc( size_t xWantedSize )
|
|
|
++{
|
|
|
++ BlockLink_t * pxBlock, * pxPreviousBlock, * pxNewBlockLink;
|
|
|
++ static BaseType_t xHeapHasBeenInitialised = pdFALSE;
|
|
|
++ void * pvReturn = NULL;
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ /* If this is the first call to malloc then the heap will require
|
|
|
++ * initialisation to setup the list of free blocks. */
|
|
|
++ if( xHeapHasBeenInitialised == pdFALSE )
|
|
|
++ {
|
|
|
++ prvHeapInit();
|
|
|
++ xHeapHasBeenInitialised = pdTRUE;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* The wanted size must be increased so it can contain a BlockLink_t
|
|
|
++ * structure in addition to the requested amount of bytes. */
|
|
|
++ if( ( xWantedSize > 0 ) &&
|
|
|
++ ( ( xWantedSize + heapSTRUCT_SIZE ) > xWantedSize ) ) /* Overflow check */
|
|
|
++ {
|
|
|
++ xWantedSize += heapSTRUCT_SIZE;
|
|
|
++
|
|
|
++ /* Byte alignment required. Check for overflow. */
|
|
|
++ if( ( xWantedSize + ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) ) )
|
|
|
++ > xWantedSize )
|
|
|
++ {
|
|
|
++ xWantedSize += ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) );
|
|
|
++ configASSERT( ( xWantedSize & portBYTE_ALIGNMENT_MASK ) == 0 );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++
|
|
|
++
|
|
|
++ if( ( xWantedSize > 0 ) && ( xWantedSize <= xFreeBytesRemaining ) )
|
|
|
++ {
|
|
|
++ /* Blocks are stored in byte order - traverse the list from the start
|
|
|
++ * (smallest) block until one of adequate size is found. */
|
|
|
++ pxPreviousBlock = &xStart;
|
|
|
++ pxBlock = xStart.pxNextFreeBlock;
|
|
|
++
|
|
|
++ while( ( pxBlock->xBlockSize < xWantedSize ) && ( pxBlock->pxNextFreeBlock != NULL ) )
|
|
|
++ {
|
|
|
++ pxPreviousBlock = pxBlock;
|
|
|
++ pxBlock = pxBlock->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* If we found the end marker then a block of adequate size was not found. */
|
|
|
++ if( pxBlock != &xEnd )
|
|
|
++ {
|
|
|
++ /* Return the memory space - jumping over the BlockLink_t structure
|
|
|
++ * at its start. */
|
|
|
++ pvReturn = ( void * ) ( ( ( uint8_t * ) pxPreviousBlock->pxNextFreeBlock ) + heapSTRUCT_SIZE );
|
|
|
++
|
|
|
++ /* This block is being returned for use so must be taken out of the
|
|
|
++ * list of free blocks. */
|
|
|
++ pxPreviousBlock->pxNextFreeBlock = pxBlock->pxNextFreeBlock;
|
|
|
++
|
|
|
++ /* If the block is larger than required it can be split into two. */
|
|
|
++ if( ( pxBlock->xBlockSize - xWantedSize ) > heapMINIMUM_BLOCK_SIZE )
|
|
|
++ {
|
|
|
++ /* This block is to be split into two. Create a new block
|
|
|
++ * following the number of bytes requested. The void cast is
|
|
|
++ * used to prevent byte alignment warnings from the compiler. */
|
|
|
++ pxNewBlockLink = ( void * ) ( ( ( uint8_t * ) pxBlock ) + xWantedSize );
|
|
|
++
|
|
|
++ /* Calculate the sizes of two blocks split from the single
|
|
|
++ * block. */
|
|
|
++ pxNewBlockLink->xBlockSize = pxBlock->xBlockSize - xWantedSize;
|
|
|
++ pxBlock->xBlockSize = xWantedSize;
|
|
|
++
|
|
|
++ /* Insert the new block into the list of free blocks. */
|
|
|
++ prvInsertBlockIntoFreeList( ( pxNewBlockLink ) );
|
|
|
++ }
|
|
|
++
|
|
|
++ xFreeBytesRemaining -= pxBlock->xBlockSize;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++
|
|
|
++ #if ( configUSE_MALLOC_FAILED_HOOK == 1 )
|
|
|
++ {
|
|
|
++ if( pvReturn == NULL )
|
|
|
++ {
|
|
|
++ extern void vApplicationMallocFailedHook( void );
|
|
|
++ vApplicationMallocFailedHook();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ return pvReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortFree( void * pv )
|
|
|
++{
|
|
|
++ uint8_t * puc = ( uint8_t * ) pv;
|
|
|
++ BlockLink_t * pxLink;
|
|
|
++
|
|
|
++ if( pv != NULL )
|
|
|
++ {
|
|
|
++ /* The memory being freed will have an BlockLink_t structure immediately
|
|
|
++ * before it. */
|
|
|
++ puc -= heapSTRUCT_SIZE;
|
|
|
++
|
|
|
++ /* This unexpected casting is to keep some compilers from issuing
|
|
|
++ * byte alignment warnings. */
|
|
|
++ pxLink = ( void * ) puc;
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ /* Add this block to the list of free blocks. */
|
|
|
++ prvInsertBlockIntoFreeList( ( ( BlockLink_t * ) pxLink ) );
|
|
|
++ xFreeBytesRemaining += pxLink->xBlockSize;
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++size_t xPortGetFreeHeapSize( void )
|
|
|
++{
|
|
|
++ return xFreeBytesRemaining;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortInitialiseBlocks( void )
|
|
|
++{
|
|
|
++ /* This just exists to keep the linker quiet. */
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++static void prvHeapInit( void )
|
|
|
++{
|
|
|
++ BlockLink_t * pxFirstFreeBlock;
|
|
|
++ uint8_t * pucAlignedHeap;
|
|
|
++
|
|
|
++ /* Ensure the heap starts on a correctly aligned boundary. */
|
|
|
++ pucAlignedHeap = ( uint8_t * ) ( ( ( portPOINTER_SIZE_TYPE ) & ucHeap[ portBYTE_ALIGNMENT - 1 ] ) & ( ~( ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) ) );
|
|
|
++
|
|
|
++ /* xStart is used to hold a pointer to the first item in the list of free
|
|
|
++ * blocks. The void cast is used to prevent compiler warnings. */
|
|
|
++ xStart.pxNextFreeBlock = ( void * ) pucAlignedHeap;
|
|
|
++ xStart.xBlockSize = ( size_t ) 0;
|
|
|
++
|
|
|
++ /* xEnd is used to mark the end of the list of free blocks. */
|
|
|
++ xEnd.xBlockSize = configADJUSTED_HEAP_SIZE;
|
|
|
++ xEnd.pxNextFreeBlock = NULL;
|
|
|
++
|
|
|
++ /* To start with there is a single free block that is sized to take up the
|
|
|
++ * entire heap space. */
|
|
|
++ pxFirstFreeBlock = ( void * ) pucAlignedHeap;
|
|
|
++ pxFirstFreeBlock->xBlockSize = configADJUSTED_HEAP_SIZE;
|
|
|
++ pxFirstFreeBlock->pxNextFreeBlock = &xEnd;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_3.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_3.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..7cdd9bb18a
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_3.c
|
|
|
+@@ -0,0 +1,78 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++/*
|
|
|
++ * Implementation of pvPortMalloc() and vPortFree() that relies on the
|
|
|
++ * compilers own malloc() and free() implementations.
|
|
|
++ *
|
|
|
++ * This file can only be used if the linker is configured to to generate
|
|
|
++ * a heap memory area.
|
|
|
++ *
|
|
|
++ * See heap_1.c, heap_2.c and heap_4.c for alternative implementations, and the
|
|
|
++ * memory management pages of https://www.FreeRTOS.org for more information.
|
|
|
++ */
|
|
|
++
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 0 )
|
|
|
++ #error This file must not be used if configSUPPORT_DYNAMIC_ALLOCATION is 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void * pvPortMalloc( size_t xWantedSize )
|
|
|
++{
|
|
|
++ void * pvReturn;
|
|
|
++
|
|
|
++ pvReturn = RT_KERNEL_MALLOC( xWantedSize );
|
|
|
++
|
|
|
++ #if ( configUSE_MALLOC_FAILED_HOOK == 1 )
|
|
|
++ {
|
|
|
++ if( pvReturn == NULL )
|
|
|
++ {
|
|
|
++ extern void vApplicationMallocFailedHook( void );
|
|
|
++ vApplicationMallocFailedHook();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ return pvReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortFree( void * pv )
|
|
|
++{
|
|
|
++ if( pv )
|
|
|
++ {
|
|
|
++ RT_KERNEL_FREE( pv );
|
|
|
++ }
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_4.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_4.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..53536b7025
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_4.c
|
|
|
+@@ -0,0 +1,447 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/*
|
|
|
++ * A sample implementation of pvPortMalloc() and vPortFree() that combines
|
|
|
++ * (coalescences) adjacent memory blocks as they are freed, and in so doing
|
|
|
++ * limits memory fragmentation.
|
|
|
++ *
|
|
|
++ * See heap_1.c, heap_2.c and heap_3.c for alternative implementations, and the
|
|
|
++ * memory management pages of https://www.FreeRTOS.org for more information.
|
|
|
++ */
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 0 )
|
|
|
++ #error This file must not be used if configSUPPORT_DYNAMIC_ALLOCATION is 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Block sizes must not get too small. */
|
|
|
++#define heapMINIMUM_BLOCK_SIZE ( ( size_t ) ( xHeapStructSize << 1 ) )
|
|
|
++
|
|
|
++/* Assumes 8bit bytes! */
|
|
|
++#define heapBITS_PER_BYTE ( ( size_t ) 8 )
|
|
|
++
|
|
|
++/* Allocate the memory for the heap. */
|
|
|
++#if ( configAPPLICATION_ALLOCATED_HEAP == 1 )
|
|
|
++
|
|
|
++/* The application writer has already defined the array used for the RTOS
|
|
|
++* heap - probably so it can be placed in a special segment or address. */
|
|
|
++ extern uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
|
|
|
++#else
|
|
|
++ static uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
|
|
|
++#endif /* configAPPLICATION_ALLOCATED_HEAP */
|
|
|
++
|
|
|
++/* Define the linked list structure. This is used to link free blocks in order
|
|
|
++ * of their memory address. */
|
|
|
++typedef struct A_BLOCK_LINK
|
|
|
++{
|
|
|
++ struct A_BLOCK_LINK * pxNextFreeBlock; /*<< The next free block in the list. */
|
|
|
++ size_t xBlockSize; /*<< The size of the free block. */
|
|
|
++} BlockLink_t;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/*
|
|
|
++ * Inserts a block of memory that is being freed into the correct position in
|
|
|
++ * the list of free memory blocks. The block being freed will be merged with
|
|
|
++ * the block in front it and/or the block behind it if the memory blocks are
|
|
|
++ * adjacent to each other.
|
|
|
++ */
|
|
|
++static void prvInsertBlockIntoFreeList( BlockLink_t * pxBlockToInsert );
|
|
|
++
|
|
|
++/*
|
|
|
++ * Called automatically to setup the required heap structures the first time
|
|
|
++ * pvPortMalloc() is called.
|
|
|
++ */
|
|
|
++static void prvHeapInit( void );
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* The size of the structure placed at the beginning of each allocated memory
|
|
|
++ * block must by correctly byte aligned. */
|
|
|
++static const size_t xHeapStructSize = ( sizeof( BlockLink_t ) + ( ( size_t ) ( portBYTE_ALIGNMENT - 1 ) ) ) & ~( ( size_t ) portBYTE_ALIGNMENT_MASK );
|
|
|
++
|
|
|
++/* Create a couple of list links to mark the start and end of the list. */
|
|
|
++static BlockLink_t xStart, * pxEnd = NULL;
|
|
|
++
|
|
|
++/* Keeps track of the number of calls to allocate and free memory as well as the
|
|
|
++ * number of free bytes remaining, but says nothing about fragmentation. */
|
|
|
++static size_t xFreeBytesRemaining = 0U;
|
|
|
++static size_t xMinimumEverFreeBytesRemaining = 0U;
|
|
|
++static size_t xNumberOfSuccessfulAllocations = 0;
|
|
|
++static size_t xNumberOfSuccessfulFrees = 0;
|
|
|
++
|
|
|
++/* Gets set to the top bit of an size_t type. When this bit in the xBlockSize
|
|
|
++ * member of an BlockLink_t structure is set then the block belongs to the
|
|
|
++ * application. When the bit is free the block is still part of the free heap
|
|
|
++ * space. */
|
|
|
++static size_t xBlockAllocatedBit = 0;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void * pvPortMalloc( size_t xWantedSize )
|
|
|
++{
|
|
|
++ BlockLink_t * pxBlock, * pxPreviousBlock, * pxNewBlockLink;
|
|
|
++ void * pvReturn = NULL;
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ /* If this is the first call to malloc then the heap will require
|
|
|
++ * initialisation to setup the list of free blocks. */
|
|
|
++ if( pxEnd == NULL )
|
|
|
++ {
|
|
|
++ prvHeapInit();
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Check the requested block size is not so large that the top bit is
|
|
|
++ * set. The top bit of the block size member of the BlockLink_t structure
|
|
|
++ * is used to determine who owns the block - the application or the
|
|
|
++ * kernel, so it must be free. */
|
|
|
++ if( ( xWantedSize & xBlockAllocatedBit ) == 0 )
|
|
|
++ {
|
|
|
++ /* The wanted size must be increased so it can contain a BlockLink_t
|
|
|
++ * structure in addition to the requested amount of bytes. */
|
|
|
++ if( ( xWantedSize > 0 ) &&
|
|
|
++ ( ( xWantedSize + xHeapStructSize ) > xWantedSize ) ) /* Overflow check */
|
|
|
++ {
|
|
|
++ xWantedSize += xHeapStructSize;
|
|
|
++
|
|
|
++ /* Ensure that blocks are always aligned. */
|
|
|
++ if( ( xWantedSize & portBYTE_ALIGNMENT_MASK ) != 0x00 )
|
|
|
++ {
|
|
|
++ /* Byte alignment required. Check for overflow. */
|
|
|
++ if( ( xWantedSize + ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) ) )
|
|
|
++ > xWantedSize )
|
|
|
++ {
|
|
|
++ xWantedSize += ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) );
|
|
|
++ configASSERT( ( xWantedSize & portBYTE_ALIGNMENT_MASK ) == 0 );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++
|
|
|
++ if( ( xWantedSize > 0 ) && ( xWantedSize <= xFreeBytesRemaining ) )
|
|
|
++ {
|
|
|
++ /* Traverse the list from the start (lowest address) block until
|
|
|
++ * one of adequate size is found. */
|
|
|
++ pxPreviousBlock = &xStart;
|
|
|
++ pxBlock = xStart.pxNextFreeBlock;
|
|
|
++
|
|
|
++ while( ( pxBlock->xBlockSize < xWantedSize ) && ( pxBlock->pxNextFreeBlock != NULL ) )
|
|
|
++ {
|
|
|
++ pxPreviousBlock = pxBlock;
|
|
|
++ pxBlock = pxBlock->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* If the end marker was reached then a block of adequate size
|
|
|
++ * was not found. */
|
|
|
++ if( pxBlock != pxEnd )
|
|
|
++ {
|
|
|
++ /* Return the memory space pointed to - jumping over the
|
|
|
++ * BlockLink_t structure at its start. */
|
|
|
++ pvReturn = ( void * ) ( ( ( uint8_t * ) pxPreviousBlock->pxNextFreeBlock ) + xHeapStructSize );
|
|
|
++
|
|
|
++ /* This block is being returned for use so must be taken out
|
|
|
++ * of the list of free blocks. */
|
|
|
++ pxPreviousBlock->pxNextFreeBlock = pxBlock->pxNextFreeBlock;
|
|
|
++
|
|
|
++ /* If the block is larger than required it can be split into
|
|
|
++ * two. */
|
|
|
++ if( ( pxBlock->xBlockSize - xWantedSize ) > heapMINIMUM_BLOCK_SIZE )
|
|
|
++ {
|
|
|
++ /* This block is to be split into two. Create a new
|
|
|
++ * block following the number of bytes requested. The void
|
|
|
++ * cast is used to prevent byte alignment warnings from the
|
|
|
++ * compiler. */
|
|
|
++ pxNewBlockLink = ( void * ) ( ( ( uint8_t * ) pxBlock ) + xWantedSize );
|
|
|
++ configASSERT( ( ( ( size_t ) pxNewBlockLink ) & portBYTE_ALIGNMENT_MASK ) == 0 );
|
|
|
++
|
|
|
++ /* Calculate the sizes of two blocks split from the
|
|
|
++ * single block. */
|
|
|
++ pxNewBlockLink->xBlockSize = pxBlock->xBlockSize - xWantedSize;
|
|
|
++ pxBlock->xBlockSize = xWantedSize;
|
|
|
++
|
|
|
++ /* Insert the new block into the list of free blocks. */
|
|
|
++ prvInsertBlockIntoFreeList( pxNewBlockLink );
|
|
|
++ }
|
|
|
++
|
|
|
++ xFreeBytesRemaining -= pxBlock->xBlockSize;
|
|
|
++
|
|
|
++ if( xFreeBytesRemaining < xMinimumEverFreeBytesRemaining )
|
|
|
++ {
|
|
|
++ xMinimumEverFreeBytesRemaining = xFreeBytesRemaining;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* The block is being returned - it is allocated and owned
|
|
|
++ * by the application and has no "next" block. */
|
|
|
++ pxBlock->xBlockSize |= xBlockAllocatedBit;
|
|
|
++ pxBlock->pxNextFreeBlock = NULL;
|
|
|
++ xNumberOfSuccessfulAllocations++;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++
|
|
|
++ #if ( configUSE_MALLOC_FAILED_HOOK == 1 )
|
|
|
++ {
|
|
|
++ if( pvReturn == NULL )
|
|
|
++ {
|
|
|
++ extern void vApplicationMallocFailedHook( void );
|
|
|
++ vApplicationMallocFailedHook();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ #endif /* if ( configUSE_MALLOC_FAILED_HOOK == 1 ) */
|
|
|
++
|
|
|
++ configASSERT( ( ( ( size_t ) pvReturn ) & ( size_t ) portBYTE_ALIGNMENT_MASK ) == 0 );
|
|
|
++ return pvReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortFree( void * pv )
|
|
|
++{
|
|
|
++ uint8_t * puc = ( uint8_t * ) pv;
|
|
|
++ BlockLink_t * pxLink;
|
|
|
++
|
|
|
++ if( pv != NULL )
|
|
|
++ {
|
|
|
++ /* The memory being freed will have an BlockLink_t structure immediately
|
|
|
++ * before it. */
|
|
|
++ puc -= xHeapStructSize;
|
|
|
++
|
|
|
++ /* This casting is to keep the compiler from issuing warnings. */
|
|
|
++ pxLink = ( void * ) puc;
|
|
|
++
|
|
|
++ /* Check the block is actually allocated. */
|
|
|
++ configASSERT( ( pxLink->xBlockSize & xBlockAllocatedBit ) != 0 );
|
|
|
++ configASSERT( pxLink->pxNextFreeBlock == NULL );
|
|
|
++
|
|
|
++ if( ( pxLink->xBlockSize & xBlockAllocatedBit ) != 0 )
|
|
|
++ {
|
|
|
++ if( pxLink->pxNextFreeBlock == NULL )
|
|
|
++ {
|
|
|
++ /* The block is being returned to the heap - it is no longer
|
|
|
++ * allocated. */
|
|
|
++ pxLink->xBlockSize &= ~xBlockAllocatedBit;
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ /* Add this block to the list of free blocks. */
|
|
|
++ xFreeBytesRemaining += pxLink->xBlockSize;
|
|
|
++ prvInsertBlockIntoFreeList( ( ( BlockLink_t * ) pxLink ) );
|
|
|
++ xNumberOfSuccessfulFrees++;
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++size_t xPortGetFreeHeapSize( void )
|
|
|
++{
|
|
|
++ return xFreeBytesRemaining;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++size_t xPortGetMinimumEverFreeHeapSize( void )
|
|
|
++{
|
|
|
++ return xMinimumEverFreeBytesRemaining;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortInitialiseBlocks( void )
|
|
|
++{
|
|
|
++ /* This just exists to keep the linker quiet. */
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++static void prvHeapInit( void ) /* PRIVILEGED_FUNCTION */
|
|
|
++{
|
|
|
++ BlockLink_t * pxFirstFreeBlock;
|
|
|
++ uint8_t * pucAlignedHeap;
|
|
|
++ size_t uxAddress;
|
|
|
++ size_t xTotalHeapSize = configTOTAL_HEAP_SIZE;
|
|
|
++
|
|
|
++ /* Ensure the heap starts on a correctly aligned boundary. */
|
|
|
++ uxAddress = ( size_t ) ucHeap;
|
|
|
++
|
|
|
++ if( ( uxAddress & portBYTE_ALIGNMENT_MASK ) != 0 )
|
|
|
++ {
|
|
|
++ uxAddress += ( portBYTE_ALIGNMENT - 1 );
|
|
|
++ uxAddress &= ~( ( size_t ) portBYTE_ALIGNMENT_MASK );
|
|
|
++ xTotalHeapSize -= uxAddress - ( size_t ) ucHeap;
|
|
|
++ }
|
|
|
++
|
|
|
++ pucAlignedHeap = ( uint8_t * ) uxAddress;
|
|
|
++
|
|
|
++ /* xStart is used to hold a pointer to the first item in the list of free
|
|
|
++ * blocks. The void cast is used to prevent compiler warnings. */
|
|
|
++ xStart.pxNextFreeBlock = ( void * ) pucAlignedHeap;
|
|
|
++ xStart.xBlockSize = ( size_t ) 0;
|
|
|
++
|
|
|
++ /* pxEnd is used to mark the end of the list of free blocks and is inserted
|
|
|
++ * at the end of the heap space. */
|
|
|
++ uxAddress = ( ( size_t ) pucAlignedHeap ) + xTotalHeapSize;
|
|
|
++ uxAddress -= xHeapStructSize;
|
|
|
++ uxAddress &= ~( ( size_t ) portBYTE_ALIGNMENT_MASK );
|
|
|
++ pxEnd = ( void * ) uxAddress;
|
|
|
++ pxEnd->xBlockSize = 0;
|
|
|
++ pxEnd->pxNextFreeBlock = NULL;
|
|
|
++
|
|
|
++ /* To start with there is a single free block that is sized to take up the
|
|
|
++ * entire heap space, minus the space taken by pxEnd. */
|
|
|
++ pxFirstFreeBlock = ( void * ) pucAlignedHeap;
|
|
|
++ pxFirstFreeBlock->xBlockSize = uxAddress - ( size_t ) pxFirstFreeBlock;
|
|
|
++ pxFirstFreeBlock->pxNextFreeBlock = pxEnd;
|
|
|
++
|
|
|
++ /* Only one block exists - and it covers the entire usable heap space. */
|
|
|
++ xMinimumEverFreeBytesRemaining = pxFirstFreeBlock->xBlockSize;
|
|
|
++ xFreeBytesRemaining = pxFirstFreeBlock->xBlockSize;
|
|
|
++
|
|
|
++ /* Work out the position of the top bit in a size_t variable. */
|
|
|
++ xBlockAllocatedBit = ( ( size_t ) 1 ) << ( ( sizeof( size_t ) * heapBITS_PER_BYTE ) - 1 );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++static void prvInsertBlockIntoFreeList( BlockLink_t * pxBlockToInsert ) /* PRIVILEGED_FUNCTION */
|
|
|
++{
|
|
|
++ BlockLink_t * pxIterator;
|
|
|
++ uint8_t * puc;
|
|
|
++
|
|
|
++ /* Iterate through the list until a block is found that has a higher address
|
|
|
++ * than the block being inserted. */
|
|
|
++ for( pxIterator = &xStart; pxIterator->pxNextFreeBlock < pxBlockToInsert; pxIterator = pxIterator->pxNextFreeBlock )
|
|
|
++ {
|
|
|
++ /* Nothing to do here, just iterate to the right position. */
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Do the block being inserted, and the block it is being inserted after
|
|
|
++ * make a contiguous block of memory? */
|
|
|
++ puc = ( uint8_t * ) pxIterator;
|
|
|
++
|
|
|
++ if( ( puc + pxIterator->xBlockSize ) == ( uint8_t * ) pxBlockToInsert )
|
|
|
++ {
|
|
|
++ pxIterator->xBlockSize += pxBlockToInsert->xBlockSize;
|
|
|
++ pxBlockToInsert = pxIterator;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Do the block being inserted, and the block it is being inserted before
|
|
|
++ * make a contiguous block of memory? */
|
|
|
++ puc = ( uint8_t * ) pxBlockToInsert;
|
|
|
++
|
|
|
++ if( ( puc + pxBlockToInsert->xBlockSize ) == ( uint8_t * ) pxIterator->pxNextFreeBlock )
|
|
|
++ {
|
|
|
++ if( pxIterator->pxNextFreeBlock != pxEnd )
|
|
|
++ {
|
|
|
++ /* Form one big block from the two blocks. */
|
|
|
++ pxBlockToInsert->xBlockSize += pxIterator->pxNextFreeBlock->xBlockSize;
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxIterator->pxNextFreeBlock->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxEnd;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxIterator->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* If the block being inserted plugged a gab, so was merged with the block
|
|
|
++ * before and the block after, then it's pxNextFreeBlock pointer will have
|
|
|
++ * already been set, and should not be set here as that would make it point
|
|
|
++ * to itself. */
|
|
|
++ if( pxIterator != pxBlockToInsert )
|
|
|
++ {
|
|
|
++ pxIterator->pxNextFreeBlock = pxBlockToInsert;
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortGetHeapStats( HeapStats_t * pxHeapStats )
|
|
|
++{
|
|
|
++ BlockLink_t * pxBlock;
|
|
|
++ size_t xBlocks = 0, xMaxSize = 0, xMinSize = portMAX_DELAY; /* portMAX_DELAY used as a portable way of getting the maximum value. */
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ pxBlock = xStart.pxNextFreeBlock;
|
|
|
++
|
|
|
++ /* pxBlock will be NULL if the heap has not been initialised. The heap
|
|
|
++ * is initialised automatically when the first allocation is made. */
|
|
|
++ if( pxBlock != NULL )
|
|
|
++ {
|
|
|
++ do
|
|
|
++ {
|
|
|
++ /* Increment the number of blocks and record the largest block seen
|
|
|
++ * so far. */
|
|
|
++ xBlocks++;
|
|
|
++
|
|
|
++ if( pxBlock->xBlockSize > xMaxSize )
|
|
|
++ {
|
|
|
++ xMaxSize = pxBlock->xBlockSize;
|
|
|
++ }
|
|
|
++
|
|
|
++ if( pxBlock->xBlockSize < xMinSize )
|
|
|
++ {
|
|
|
++ xMinSize = pxBlock->xBlockSize;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Move to the next block in the chain until the last block is
|
|
|
++ * reached. */
|
|
|
++ pxBlock = pxBlock->pxNextFreeBlock;
|
|
|
++ } while( pxBlock != pxEnd );
|
|
|
++ }
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++
|
|
|
++ pxHeapStats->xSizeOfLargestFreeBlockInBytes = xMaxSize;
|
|
|
++ pxHeapStats->xSizeOfSmallestFreeBlockInBytes = xMinSize;
|
|
|
++ pxHeapStats->xNumberOfFreeBlocks = xBlocks;
|
|
|
++
|
|
|
++ taskENTER_CRITICAL();
|
|
|
++ {
|
|
|
++ pxHeapStats->xAvailableHeapSpaceInBytes = xFreeBytesRemaining;
|
|
|
++ pxHeapStats->xNumberOfSuccessfulAllocations = xNumberOfSuccessfulAllocations;
|
|
|
++ pxHeapStats->xNumberOfSuccessfulFrees = xNumberOfSuccessfulFrees;
|
|
|
++ pxHeapStats->xMinimumEverFreeBytesRemaining = xMinimumEverFreeBytesRemaining;
|
|
|
++ }
|
|
|
++ taskEXIT_CRITICAL();
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_5.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_5.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..7fadbd4b0f
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/MemMang/heap_5.c
|
|
|
+@@ -0,0 +1,506 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/*
|
|
|
++ * A sample implementation of pvPortMalloc() that allows the heap to be defined
|
|
|
++ * across multiple non-contigous blocks and combines (coalescences) adjacent
|
|
|
++ * memory blocks as they are freed.
|
|
|
++ *
|
|
|
++ * See heap_1.c, heap_2.c, heap_3.c and heap_4.c for alternative
|
|
|
++ * implementations, and the memory management pages of https://www.FreeRTOS.org
|
|
|
++ * for more information.
|
|
|
++ *
|
|
|
++ * Usage notes:
|
|
|
++ *
|
|
|
++ * vPortDefineHeapRegions() ***must*** be called before pvPortMalloc().
|
|
|
++ * pvPortMalloc() will be called if any task objects (tasks, queues, event
|
|
|
++ * groups, etc.) are created, therefore vPortDefineHeapRegions() ***must*** be
|
|
|
++ * called before any other objects are defined.
|
|
|
++ *
|
|
|
++ * vPortDefineHeapRegions() takes a single parameter. The parameter is an array
|
|
|
++ * of HeapRegion_t structures. HeapRegion_t is defined in portable.h as
|
|
|
++ *
|
|
|
++ * typedef struct HeapRegion
|
|
|
++ * {
|
|
|
++ * uint8_t *pucStartAddress; << Start address of a block of memory that will be part of the heap.
|
|
|
++ * size_t xSizeInBytes; << Size of the block of memory.
|
|
|
++ * } HeapRegion_t;
|
|
|
++ *
|
|
|
++ * The array is terminated using a NULL zero sized region definition, and the
|
|
|
++ * memory regions defined in the array ***must*** appear in address order from
|
|
|
++ * low address to high address. So the following is a valid example of how
|
|
|
++ * to use the function.
|
|
|
++ *
|
|
|
++ * HeapRegion_t xHeapRegions[] =
|
|
|
++ * {
|
|
|
++ * { ( uint8_t * ) 0x80000000UL, 0x10000 }, << Defines a block of 0x10000 bytes starting at address 0x80000000
|
|
|
++ * { ( uint8_t * ) 0x90000000UL, 0xa0000 }, << Defines a block of 0xa0000 bytes starting at address of 0x90000000
|
|
|
++ * { NULL, 0 } << Terminates the array.
|
|
|
++ * };
|
|
|
++ *
|
|
|
++ * vPortDefineHeapRegions( xHeapRegions ); << Pass the array into vPortDefineHeapRegions().
|
|
|
++ *
|
|
|
++ * Note 0x80000000 is the lower address so appears in the array first.
|
|
|
++ *
|
|
|
++ */
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 0 )
|
|
|
++ #error This file must not be used if configSUPPORT_DYNAMIC_ALLOCATION is 0
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Block sizes must not get too small. */
|
|
|
++#define heapMINIMUM_BLOCK_SIZE ( ( size_t ) ( xHeapStructSize << 1 ) )
|
|
|
++
|
|
|
++/* Assumes 8bit bytes! */
|
|
|
++#define heapBITS_PER_BYTE ( ( size_t ) 8 )
|
|
|
++
|
|
|
++/* Define the linked list structure. This is used to link free blocks in order
|
|
|
++ * of their memory address. */
|
|
|
++typedef struct A_BLOCK_LINK
|
|
|
++{
|
|
|
++ struct A_BLOCK_LINK * pxNextFreeBlock; /*<< The next free block in the list. */
|
|
|
++ size_t xBlockSize; /*<< The size of the free block. */
|
|
|
++} BlockLink_t;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/*
|
|
|
++ * Inserts a block of memory that is being freed into the correct position in
|
|
|
++ * the list of free memory blocks. The block being freed will be merged with
|
|
|
++ * the block in front it and/or the block behind it if the memory blocks are
|
|
|
++ * adjacent to each other.
|
|
|
++ */
|
|
|
++static void prvInsertBlockIntoFreeList( BlockLink_t * pxBlockToInsert );
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* The size of the structure placed at the beginning of each allocated memory
|
|
|
++ * block must by correctly byte aligned. */
|
|
|
++static const size_t xHeapStructSize = ( sizeof( BlockLink_t ) + ( ( size_t ) ( portBYTE_ALIGNMENT - 1 ) ) ) & ~( ( size_t ) portBYTE_ALIGNMENT_MASK );
|
|
|
++
|
|
|
++/* Create a couple of list links to mark the start and end of the list. */
|
|
|
++static BlockLink_t xStart, * pxEnd = NULL;
|
|
|
++
|
|
|
++/* Keeps track of the number of calls to allocate and free memory as well as the
|
|
|
++ * number of free bytes remaining, but says nothing about fragmentation. */
|
|
|
++static size_t xFreeBytesRemaining = 0U;
|
|
|
++static size_t xMinimumEverFreeBytesRemaining = 0U;
|
|
|
++static size_t xNumberOfSuccessfulAllocations = 0;
|
|
|
++static size_t xNumberOfSuccessfulFrees = 0;
|
|
|
++
|
|
|
++/* Gets set to the top bit of an size_t type. When this bit in the xBlockSize
|
|
|
++ * member of an BlockLink_t structure is set then the block belongs to the
|
|
|
++ * application. When the bit is free the block is still part of the free heap
|
|
|
++ * space. */
|
|
|
++static size_t xBlockAllocatedBit = 0;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void * pvPortMalloc( size_t xWantedSize )
|
|
|
++{
|
|
|
++ BlockLink_t * pxBlock, * pxPreviousBlock, * pxNewBlockLink;
|
|
|
++ void * pvReturn = NULL;
|
|
|
++
|
|
|
++ /* The heap must be initialised before the first call to
|
|
|
++ * prvPortMalloc(). */
|
|
|
++ configASSERT( pxEnd );
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ /* Check the requested block size is not so large that the top bit is
|
|
|
++ * set. The top bit of the block size member of the BlockLink_t structure
|
|
|
++ * is used to determine who owns the block - the application or the
|
|
|
++ * kernel, so it must be free. */
|
|
|
++ if( ( xWantedSize & xBlockAllocatedBit ) == 0 )
|
|
|
++ {
|
|
|
++ /* The wanted size is increased so it can contain a BlockLink_t
|
|
|
++ * structure in addition to the requested amount of bytes. */
|
|
|
++ if( ( xWantedSize > 0 ) &&
|
|
|
++ ( ( xWantedSize + xHeapStructSize ) > xWantedSize ) ) /* Overflow check */
|
|
|
++ {
|
|
|
++ xWantedSize += xHeapStructSize;
|
|
|
++
|
|
|
++ /* Ensure that blocks are always aligned */
|
|
|
++ if( ( xWantedSize & portBYTE_ALIGNMENT_MASK ) != 0x00 )
|
|
|
++ {
|
|
|
++ /* Byte alignment required. Check for overflow */
|
|
|
++ if( ( xWantedSize + ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) ) ) >
|
|
|
++ xWantedSize )
|
|
|
++ {
|
|
|
++ xWantedSize += ( portBYTE_ALIGNMENT - ( xWantedSize & portBYTE_ALIGNMENT_MASK ) );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xWantedSize = 0;
|
|
|
++ }
|
|
|
++
|
|
|
++ if( ( xWantedSize > 0 ) && ( xWantedSize <= xFreeBytesRemaining ) )
|
|
|
++ {
|
|
|
++ /* Traverse the list from the start (lowest address) block until
|
|
|
++ * one of adequate size is found. */
|
|
|
++ pxPreviousBlock = &xStart;
|
|
|
++ pxBlock = xStart.pxNextFreeBlock;
|
|
|
++
|
|
|
++ while( ( pxBlock->xBlockSize < xWantedSize ) && ( pxBlock->pxNextFreeBlock != NULL ) )
|
|
|
++ {
|
|
|
++ pxPreviousBlock = pxBlock;
|
|
|
++ pxBlock = pxBlock->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* If the end marker was reached then a block of adequate size
|
|
|
++ * was not found. */
|
|
|
++ if( pxBlock != pxEnd )
|
|
|
++ {
|
|
|
++ /* Return the memory space pointed to - jumping over the
|
|
|
++ * BlockLink_t structure at its start. */
|
|
|
++ pvReturn = ( void * ) ( ( ( uint8_t * ) pxPreviousBlock->pxNextFreeBlock ) + xHeapStructSize );
|
|
|
++
|
|
|
++ /* This block is being returned for use so must be taken out
|
|
|
++ * of the list of free blocks. */
|
|
|
++ pxPreviousBlock->pxNextFreeBlock = pxBlock->pxNextFreeBlock;
|
|
|
++
|
|
|
++ /* If the block is larger than required it can be split into
|
|
|
++ * two. */
|
|
|
++ if( ( pxBlock->xBlockSize - xWantedSize ) > heapMINIMUM_BLOCK_SIZE )
|
|
|
++ {
|
|
|
++ /* This block is to be split into two. Create a new
|
|
|
++ * block following the number of bytes requested. The void
|
|
|
++ * cast is used to prevent byte alignment warnings from the
|
|
|
++ * compiler. */
|
|
|
++ pxNewBlockLink = ( void * ) ( ( ( uint8_t * ) pxBlock ) + xWantedSize );
|
|
|
++
|
|
|
++ /* Calculate the sizes of two blocks split from the
|
|
|
++ * single block. */
|
|
|
++ pxNewBlockLink->xBlockSize = pxBlock->xBlockSize - xWantedSize;
|
|
|
++ pxBlock->xBlockSize = xWantedSize;
|
|
|
++
|
|
|
++ /* Insert the new block into the list of free blocks. */
|
|
|
++ prvInsertBlockIntoFreeList( ( pxNewBlockLink ) );
|
|
|
++ }
|
|
|
++
|
|
|
++ xFreeBytesRemaining -= pxBlock->xBlockSize;
|
|
|
++
|
|
|
++ if( xFreeBytesRemaining < xMinimumEverFreeBytesRemaining )
|
|
|
++ {
|
|
|
++ xMinimumEverFreeBytesRemaining = xFreeBytesRemaining;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* The block is being returned - it is allocated and owned
|
|
|
++ * by the application and has no "next" block. */
|
|
|
++ pxBlock->xBlockSize |= xBlockAllocatedBit;
|
|
|
++ pxBlock->pxNextFreeBlock = NULL;
|
|
|
++ xNumberOfSuccessfulAllocations++;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++
|
|
|
++ #if ( configUSE_MALLOC_FAILED_HOOK == 1 )
|
|
|
++ {
|
|
|
++ if( pvReturn == NULL )
|
|
|
++ {
|
|
|
++ extern void vApplicationMallocFailedHook( void );
|
|
|
++ vApplicationMallocFailedHook();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ #endif /* if ( configUSE_MALLOC_FAILED_HOOK == 1 ) */
|
|
|
++
|
|
|
++ return pvReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortFree( void * pv )
|
|
|
++{
|
|
|
++ uint8_t * puc = ( uint8_t * ) pv;
|
|
|
++ BlockLink_t * pxLink;
|
|
|
++
|
|
|
++ if( pv != NULL )
|
|
|
++ {
|
|
|
++ /* The memory being freed will have an BlockLink_t structure immediately
|
|
|
++ * before it. */
|
|
|
++ puc -= xHeapStructSize;
|
|
|
++
|
|
|
++ /* This casting is to keep the compiler from issuing warnings. */
|
|
|
++ pxLink = ( void * ) puc;
|
|
|
++
|
|
|
++ /* Check the block is actually allocated. */
|
|
|
++ configASSERT( ( pxLink->xBlockSize & xBlockAllocatedBit ) != 0 );
|
|
|
++ configASSERT( pxLink->pxNextFreeBlock == NULL );
|
|
|
++
|
|
|
++ if( ( pxLink->xBlockSize & xBlockAllocatedBit ) != 0 )
|
|
|
++ {
|
|
|
++ if( pxLink->pxNextFreeBlock == NULL )
|
|
|
++ {
|
|
|
++ /* The block is being returned to the heap - it is no longer
|
|
|
++ * allocated. */
|
|
|
++ pxLink->xBlockSize &= ~xBlockAllocatedBit;
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ /* Add this block to the list of free blocks. */
|
|
|
++ xFreeBytesRemaining += pxLink->xBlockSize;
|
|
|
++ prvInsertBlockIntoFreeList( ( ( BlockLink_t * ) pxLink ) );
|
|
|
++ xNumberOfSuccessfulFrees++;
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++size_t xPortGetFreeHeapSize( void )
|
|
|
++{
|
|
|
++ return xFreeBytesRemaining;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++size_t xPortGetMinimumEverFreeHeapSize( void )
|
|
|
++{
|
|
|
++ return xMinimumEverFreeBytesRemaining;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++static void prvInsertBlockIntoFreeList( BlockLink_t * pxBlockToInsert )
|
|
|
++{
|
|
|
++ BlockLink_t * pxIterator;
|
|
|
++ uint8_t * puc;
|
|
|
++
|
|
|
++ /* Iterate through the list until a block is found that has a higher address
|
|
|
++ * than the block being inserted. */
|
|
|
++ for( pxIterator = &xStart; pxIterator->pxNextFreeBlock < pxBlockToInsert; pxIterator = pxIterator->pxNextFreeBlock )
|
|
|
++ {
|
|
|
++ /* Nothing to do here, just iterate to the right position. */
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Do the block being inserted, and the block it is being inserted after
|
|
|
++ * make a contiguous block of memory? */
|
|
|
++ puc = ( uint8_t * ) pxIterator;
|
|
|
++
|
|
|
++ if( ( puc + pxIterator->xBlockSize ) == ( uint8_t * ) pxBlockToInsert )
|
|
|
++ {
|
|
|
++ pxIterator->xBlockSize += pxBlockToInsert->xBlockSize;
|
|
|
++ pxBlockToInsert = pxIterator;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Do the block being inserted, and the block it is being inserted before
|
|
|
++ * make a contiguous block of memory? */
|
|
|
++ puc = ( uint8_t * ) pxBlockToInsert;
|
|
|
++
|
|
|
++ if( ( puc + pxBlockToInsert->xBlockSize ) == ( uint8_t * ) pxIterator->pxNextFreeBlock )
|
|
|
++ {
|
|
|
++ if( pxIterator->pxNextFreeBlock != pxEnd )
|
|
|
++ {
|
|
|
++ /* Form one big block from the two blocks. */
|
|
|
++ pxBlockToInsert->xBlockSize += pxIterator->pxNextFreeBlock->xBlockSize;
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxIterator->pxNextFreeBlock->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxEnd;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ pxBlockToInsert->pxNextFreeBlock = pxIterator->pxNextFreeBlock;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* If the block being inserted plugged a gab, so was merged with the block
|
|
|
++ * before and the block after, then it's pxNextFreeBlock pointer will have
|
|
|
++ * already been set, and should not be set here as that would make it point
|
|
|
++ * to itself. */
|
|
|
++ if( pxIterator != pxBlockToInsert )
|
|
|
++ {
|
|
|
++ pxIterator->pxNextFreeBlock = pxBlockToInsert;
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortDefineHeapRegions( const HeapRegion_t * const pxHeapRegions )
|
|
|
++{
|
|
|
++ BlockLink_t * pxFirstFreeBlockInRegion = NULL, * pxPreviousFreeBlock;
|
|
|
++ size_t xAlignedHeap;
|
|
|
++ size_t xTotalRegionSize, xTotalHeapSize = 0;
|
|
|
++ BaseType_t xDefinedRegions = 0;
|
|
|
++ size_t xAddress;
|
|
|
++ const HeapRegion_t * pxHeapRegion;
|
|
|
++
|
|
|
++ /* Can only call once! */
|
|
|
++ configASSERT( pxEnd == NULL );
|
|
|
++
|
|
|
++ pxHeapRegion = &( pxHeapRegions[ xDefinedRegions ] );
|
|
|
++
|
|
|
++ while( pxHeapRegion->xSizeInBytes > 0 )
|
|
|
++ {
|
|
|
++ xTotalRegionSize = pxHeapRegion->xSizeInBytes;
|
|
|
++
|
|
|
++ /* Ensure the heap region starts on a correctly aligned boundary. */
|
|
|
++ xAddress = ( size_t ) pxHeapRegion->pucStartAddress;
|
|
|
++
|
|
|
++ if( ( xAddress & portBYTE_ALIGNMENT_MASK ) != 0 )
|
|
|
++ {
|
|
|
++ xAddress += ( portBYTE_ALIGNMENT - 1 );
|
|
|
++ xAddress &= ~portBYTE_ALIGNMENT_MASK;
|
|
|
++
|
|
|
++ /* Adjust the size for the bytes lost to alignment. */
|
|
|
++ xTotalRegionSize -= xAddress - ( size_t ) pxHeapRegion->pucStartAddress;
|
|
|
++ }
|
|
|
++
|
|
|
++ xAlignedHeap = xAddress;
|
|
|
++
|
|
|
++ /* Set xStart if it has not already been set. */
|
|
|
++ if( xDefinedRegions == 0 )
|
|
|
++ {
|
|
|
++ /* xStart is used to hold a pointer to the first item in the list of
|
|
|
++ * free blocks. The void cast is used to prevent compiler warnings. */
|
|
|
++ xStart.pxNextFreeBlock = ( BlockLink_t * ) xAlignedHeap;
|
|
|
++ xStart.xBlockSize = ( size_t ) 0;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ /* Should only get here if one region has already been added to the
|
|
|
++ * heap. */
|
|
|
++ configASSERT( pxEnd != NULL );
|
|
|
++
|
|
|
++ /* Check blocks are passed in with increasing start addresses. */
|
|
|
++ configASSERT( xAddress > ( size_t ) pxEnd );
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Remember the location of the end marker in the previous region, if
|
|
|
++ * any. */
|
|
|
++ pxPreviousFreeBlock = pxEnd;
|
|
|
++
|
|
|
++ /* pxEnd is used to mark the end of the list of free blocks and is
|
|
|
++ * inserted at the end of the region space. */
|
|
|
++ xAddress = xAlignedHeap + xTotalRegionSize;
|
|
|
++ xAddress -= xHeapStructSize;
|
|
|
++ xAddress &= ~portBYTE_ALIGNMENT_MASK;
|
|
|
++ pxEnd = ( BlockLink_t * ) xAddress;
|
|
|
++ pxEnd->xBlockSize = 0;
|
|
|
++ pxEnd->pxNextFreeBlock = NULL;
|
|
|
++
|
|
|
++ /* To start with there is a single free block in this region that is
|
|
|
++ * sized to take up the entire heap region minus the space taken by the
|
|
|
++ * free block structure. */
|
|
|
++ pxFirstFreeBlockInRegion = ( BlockLink_t * ) xAlignedHeap;
|
|
|
++ pxFirstFreeBlockInRegion->xBlockSize = xAddress - ( size_t ) pxFirstFreeBlockInRegion;
|
|
|
++ pxFirstFreeBlockInRegion->pxNextFreeBlock = pxEnd;
|
|
|
++
|
|
|
++ /* If this is not the first region that makes up the entire heap space
|
|
|
++ * then link the previous region to this region. */
|
|
|
++ if( pxPreviousFreeBlock != NULL )
|
|
|
++ {
|
|
|
++ pxPreviousFreeBlock->pxNextFreeBlock = pxFirstFreeBlockInRegion;
|
|
|
++ }
|
|
|
++
|
|
|
++ xTotalHeapSize += pxFirstFreeBlockInRegion->xBlockSize;
|
|
|
++
|
|
|
++ /* Move onto the next HeapRegion_t structure. */
|
|
|
++ xDefinedRegions++;
|
|
|
++ pxHeapRegion = &( pxHeapRegions[ xDefinedRegions ] );
|
|
|
++ }
|
|
|
++
|
|
|
++ xMinimumEverFreeBytesRemaining = xTotalHeapSize;
|
|
|
++ xFreeBytesRemaining = xTotalHeapSize;
|
|
|
++
|
|
|
++ /* Check something was actually defined before it is accessed. */
|
|
|
++ configASSERT( xTotalHeapSize );
|
|
|
++
|
|
|
++ /* Work out the position of the top bit in a size_t variable. */
|
|
|
++ xBlockAllocatedBit = ( ( size_t ) 1 ) << ( ( sizeof( size_t ) * heapBITS_PER_BYTE ) - 1 );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vPortGetHeapStats( HeapStats_t * pxHeapStats )
|
|
|
++{
|
|
|
++ BlockLink_t * pxBlock;
|
|
|
++ size_t xBlocks = 0, xMaxSize = 0, xMinSize = portMAX_DELAY; /* portMAX_DELAY used as a portable way of getting the maximum value. */
|
|
|
++
|
|
|
++ vTaskSuspendAll();
|
|
|
++ {
|
|
|
++ pxBlock = xStart.pxNextFreeBlock;
|
|
|
++
|
|
|
++ /* pxBlock will be NULL if the heap has not been initialised. The heap
|
|
|
++ * is initialised automatically when the first allocation is made. */
|
|
|
++ if( pxBlock != NULL )
|
|
|
++ {
|
|
|
++ do
|
|
|
++ {
|
|
|
++ /* Increment the number of blocks and record the largest block seen
|
|
|
++ * so far. */
|
|
|
++ xBlocks++;
|
|
|
++
|
|
|
++ if( pxBlock->xBlockSize > xMaxSize )
|
|
|
++ {
|
|
|
++ xMaxSize = pxBlock->xBlockSize;
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Heap five will have a zero sized block at the end of each
|
|
|
++ * each region - the block is only used to link to the next
|
|
|
++ * heap region so it not a real block. */
|
|
|
++ if( pxBlock->xBlockSize != 0 )
|
|
|
++ {
|
|
|
++ if( pxBlock->xBlockSize < xMinSize )
|
|
|
++ {
|
|
|
++ xMinSize = pxBlock->xBlockSize;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ /* Move to the next block in the chain until the last block is
|
|
|
++ * reached. */
|
|
|
++ pxBlock = pxBlock->pxNextFreeBlock;
|
|
|
++ } while( pxBlock != pxEnd );
|
|
|
++ }
|
|
|
++ }
|
|
|
++ ( void ) xTaskResumeAll();
|
|
|
++
|
|
|
++ pxHeapStats->xSizeOfLargestFreeBlockInBytes = xMaxSize;
|
|
|
++ pxHeapStats->xSizeOfSmallestFreeBlockInBytes = xMinSize;
|
|
|
++ pxHeapStats->xNumberOfFreeBlocks = xBlocks;
|
|
|
++
|
|
|
++ taskENTER_CRITICAL();
|
|
|
++ {
|
|
|
++ pxHeapStats->xAvailableHeapSpaceInBytes = xFreeBytesRemaining;
|
|
|
++ pxHeapStats->xNumberOfSuccessfulAllocations = xNumberOfSuccessfulAllocations;
|
|
|
++ pxHeapStats->xNumberOfSuccessfulFrees = xNumberOfSuccessfulFrees;
|
|
|
++ pxHeapStats->xMinimumEverFreeBytesRemaining = xMinimumEverFreeBytesRemaining;
|
|
|
++ }
|
|
|
++ taskEXIT_CRITICAL();
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/port_common.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/port_common.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..9d8159f588
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/port_common.c
|
|
|
+@@ -0,0 +1,203 @@
|
|
|
++/*
|
|
|
++ * SPDX-FileCopyrightText: 2021 Espressif Systems (Shanghai) CO LTD
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: Apache-2.0
|
|
|
++ */
|
|
|
++
|
|
|
++#include <string.h>
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++#include "portmacro.h"
|
|
|
++#include "esp_system.h"
|
|
|
++#include "esp_heap_caps_init.h"
|
|
|
++#include "esp_int_wdt.h"
|
|
|
++#include "esp_task_wdt.h"
|
|
|
++#include "esp_task.h"
|
|
|
++#include "esp_private/crosscore_int.h"
|
|
|
++#include "esp_private/startup_internal.h" /* Required by g_spiram_ok. [refactor-todo] for g_spiram_ok */
|
|
|
++#include "esp_log.h"
|
|
|
++#include "soc/soc_memory_types.h"
|
|
|
++#include "soc/dport_access.h"
|
|
|
++#include "sdkconfig.h"
|
|
|
++
|
|
|
++#if CONFIG_IDF_TARGET_ESP32
|
|
|
++#include "esp32/spiram.h"
|
|
|
++#elif CONFIG_IDF_TARGET_ESP32S2
|
|
|
++#include "esp32s2/spiram.h"
|
|
|
++#elif CONFIG_IDF_TARGET_ESP32S3
|
|
|
++#include "esp32s3/spiram.h"
|
|
|
++#elif CONFIG_IDF_TARGET_ESP32C3 || CONFIG_IDF_TARGET_ESP32H2
|
|
|
++// SPIRAM is not supported on ESP32-C3
|
|
|
++#endif
|
|
|
++
|
|
|
++#if CONFIG_SPIRAM_MALLOC_RESERVE_INTERNAL
|
|
|
++static const char* TAG = "cpu_start";
|
|
|
++#endif
|
|
|
++
|
|
|
++/* Architecture-agnostic parts of the FreeRTOS ESP-IDF port layer can go here.
|
|
|
++ *
|
|
|
++ * The actual call flow will be to call esp_startup_start_app() in <ARCH>/port.c,
|
|
|
++ * which will then call esp_startup_start_app_common()
|
|
|
++ */
|
|
|
++
|
|
|
++// Duplicate of inaccessible xSchedulerRunning; needed at startup to avoid counting nesting
|
|
|
++volatile unsigned port_xSchedulerRunning[portNUM_PROCESSORS] = {0};
|
|
|
++
|
|
|
++// For now, running FreeRTOS on one core and a bare metal on the other (or other OSes)
|
|
|
++// is not supported. For now CONFIG_FREERTOS_UNICORE and CONFIG_ESP_SYSTEM_SINGLE_CORE_MODE
|
|
|
++// should mirror each other's values.
|
|
|
++//
|
|
|
++// And since this should be true, we can just check for CONFIG_FREERTOS_UNICORE.
|
|
|
++#if CONFIG_FREERTOS_UNICORE != CONFIG_ESP_SYSTEM_SINGLE_CORE_MODE
|
|
|
++ #error "FreeRTOS and system configuration mismatch regarding the use of multiple cores."
|
|
|
++#endif
|
|
|
++
|
|
|
++static void main_task(void* args);
|
|
|
++
|
|
|
++#ifdef CONFIG_ESP_SYSTEM_GDBSTUB_RUNTIME
|
|
|
++void esp_gdbstub_init(void);
|
|
|
++#endif // CONFIG_ESP_SYSTEM_GDBSTUB_RUNTIME
|
|
|
++
|
|
|
++extern void app_main(void);
|
|
|
++
|
|
|
++void esp_startup_start_app_common(void)
|
|
|
++{
|
|
|
++#if CONFIG_ESP_INT_WDT
|
|
|
++ esp_int_wdt_init();
|
|
|
++ //Initialize the interrupt watch dog for CPU0.
|
|
|
++ esp_int_wdt_cpu_init();
|
|
|
++#endif
|
|
|
++
|
|
|
++ esp_crosscore_int_init();
|
|
|
++
|
|
|
++#ifdef CONFIG_ESP_SYSTEM_GDBSTUB_RUNTIME
|
|
|
++ esp_gdbstub_init();
|
|
|
++#endif // CONFIG_ESP_SYSTEM_GDBSTUB_RUNTIME
|
|
|
++
|
|
|
++#ifdef CONFIG_IDF_RTOS_RTTHREAD
|
|
|
++ app_main();
|
|
|
++#else
|
|
|
++ portBASE_TYPE res = xTaskCreatePinnedToCore(&main_task, "main",
|
|
|
++ ESP_TASK_MAIN_STACK, NULL,
|
|
|
++ ESP_TASK_MAIN_PRIO, NULL, ESP_TASK_MAIN_CORE);
|
|
|
++ assert(res == pdTRUE);
|
|
|
++ (void)res;
|
|
|
++#endif
|
|
|
++
|
|
|
++}
|
|
|
++
|
|
|
++static void main_task(void* args)
|
|
|
++{
|
|
|
++#if !CONFIG_FREERTOS_UNICORE
|
|
|
++ // Wait for FreeRTOS initialization to finish on APP CPU, before replacing its startup stack
|
|
|
++ while (port_xSchedulerRunning[1] == 0) {
|
|
|
++ ;
|
|
|
++ }
|
|
|
++#endif
|
|
|
++
|
|
|
++ // [refactor-todo] check if there is a way to move the following block to esp_system startup
|
|
|
++ heap_caps_enable_nonos_stack_heaps();
|
|
|
++
|
|
|
++ // Now we have startup stack RAM available for heap, enable any DMA pool memory
|
|
|
++#if CONFIG_SPIRAM_MALLOC_RESERVE_INTERNAL
|
|
|
++ if (g_spiram_ok) {
|
|
|
++ esp_err_t r = esp_spiram_reserve_dma_pool(CONFIG_SPIRAM_MALLOC_RESERVE_INTERNAL);
|
|
|
++ if (r != ESP_OK) {
|
|
|
++ ESP_EARLY_LOGE(TAG, "Could not reserve internal/DMA pool (error 0x%x)", r);
|
|
|
++ abort();
|
|
|
++ }
|
|
|
++ }
|
|
|
++#endif
|
|
|
++
|
|
|
++ //Initialize task wdt if configured to do so
|
|
|
++#ifdef CONFIG_ESP_TASK_WDT_PANIC
|
|
|
++ ESP_ERROR_CHECK(esp_task_wdt_init(CONFIG_ESP_TASK_WDT_TIMEOUT_S, true));
|
|
|
++#elif CONFIG_ESP_TASK_WDT
|
|
|
++ ESP_ERROR_CHECK(esp_task_wdt_init(CONFIG_ESP_TASK_WDT_TIMEOUT_S, false));
|
|
|
++#endif
|
|
|
++
|
|
|
++ //Add IDLE 0 to task wdt
|
|
|
++#ifdef CONFIG_ESP_TASK_WDT_CHECK_IDLE_TASK_CPU0
|
|
|
++ TaskHandle_t idle_0 = xTaskGetIdleTaskHandleForCPU(0);
|
|
|
++ if(idle_0 != NULL){
|
|
|
++ ESP_ERROR_CHECK(esp_task_wdt_add(idle_0));
|
|
|
++ }
|
|
|
++#endif
|
|
|
++ //Add IDLE 1 to task wdt
|
|
|
++#ifdef CONFIG_ESP_TASK_WDT_CHECK_IDLE_TASK_CPU1
|
|
|
++ TaskHandle_t idle_1 = xTaskGetIdleTaskHandleForCPU(1);
|
|
|
++ if(idle_1 != NULL){
|
|
|
++ ESP_ERROR_CHECK(esp_task_wdt_add(idle_1));
|
|
|
++ }
|
|
|
++#endif
|
|
|
++
|
|
|
++ app_main();
|
|
|
++ vTaskDelete(NULL);
|
|
|
++}
|
|
|
++
|
|
|
++// -------------------- Heap Related -----------------------
|
|
|
++
|
|
|
++bool xPortCheckValidTCBMem(const void *ptr)
|
|
|
++{
|
|
|
++ return esp_ptr_internal(ptr) && esp_ptr_byte_accessible(ptr);
|
|
|
++}
|
|
|
++
|
|
|
++bool xPortcheckValidStackMem(const void *ptr)
|
|
|
++{
|
|
|
++#ifdef CONFIG_SPIRAM_ALLOW_STACK_EXTERNAL_MEMORY
|
|
|
++ return esp_ptr_byte_accessible(ptr);
|
|
|
++#else
|
|
|
++ return esp_ptr_internal(ptr) && esp_ptr_byte_accessible(ptr);
|
|
|
++#endif
|
|
|
++}
|
|
|
++
|
|
|
++// ------------- FreeRTOS Static Allocation ----------------
|
|
|
++
|
|
|
++/*
|
|
|
++This function is required by FreeRTOS when configSUPPORT_STATIC_ALLOCATION is
|
|
|
++enabled and is used by FreeRTOS to obtain memory for its IDLE tasks.
|
|
|
++
|
|
|
++Like the pvPortMallocTcbMem() and pvPortMallocStackMem() macros, TCB and stack
|
|
|
++memory MUST be placed in internal RAM.
|
|
|
++*/
|
|
|
++void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
|
|
|
++ StackType_t **ppxIdleTaskStackBuffer,
|
|
|
++ uint32_t *pulIdleTaskStackSize )
|
|
|
++{
|
|
|
++ StaticTask_t *pxTCBBufferTemp;
|
|
|
++ StackType_t *pxStackBufferTemp;
|
|
|
++ //Allocate TCB and stack buffer in internal memory
|
|
|
++ pxTCBBufferTemp = pvPortMallocTcbMem(sizeof(StaticTask_t));
|
|
|
++ pxStackBufferTemp = pvPortMallocStackMem(configIDLE_TASK_STACK_SIZE);
|
|
|
++ assert(pxTCBBufferTemp != NULL);
|
|
|
++ assert(pxStackBufferTemp != NULL);
|
|
|
++ //Write back pointers
|
|
|
++ *ppxIdleTaskTCBBuffer = pxTCBBufferTemp;
|
|
|
++ *ppxIdleTaskStackBuffer = pxStackBufferTemp;
|
|
|
++ *pulIdleTaskStackSize = configIDLE_TASK_STACK_SIZE;
|
|
|
++}
|
|
|
++
|
|
|
++/*
|
|
|
++This function is required by FreeRTOS when configSUPPORT_STATIC_ALLOCATION is
|
|
|
++enabled and is used by the FreeRTOS Timer to obtain memory for its daemone task.
|
|
|
++
|
|
|
++
|
|
|
++Like the pvPortMallocTcbMem() and pvPortMallocStackMem() macros, TCB and stack
|
|
|
++memory MUST be placed in internal RAM.
|
|
|
++*/
|
|
|
++void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
|
|
|
++ StackType_t **ppxTimerTaskStackBuffer,
|
|
|
++ uint32_t *pulTimerTaskStackSize )
|
|
|
++{
|
|
|
++ StaticTask_t *pxTCBBufferTemp;
|
|
|
++ StackType_t *pxStackBufferTemp;
|
|
|
++ //Allocate TCB and stack buffer in internal memory
|
|
|
++ pxTCBBufferTemp = pvPortMallocTcbMem(sizeof(StaticTask_t));
|
|
|
++ pxStackBufferTemp = pvPortMallocStackMem(configTIMER_TASK_STACK_DEPTH);
|
|
|
++ assert(pxTCBBufferTemp != NULL);
|
|
|
++ assert(pxStackBufferTemp != NULL);
|
|
|
++ //Write back pointers
|
|
|
++ *ppxTimerTaskTCBBuffer = pxTCBBufferTemp;
|
|
|
++ *ppxTimerTaskStackBuffer = pxStackBufferTemp;
|
|
|
++ *pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/FreeRTOSConfig_arch.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/FreeRTOSConfig_arch.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..a7d534343f
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/FreeRTOSConfig_arch.h
|
|
|
+@@ -0,0 +1,105 @@
|
|
|
++/*
|
|
|
++ FreeRTOS V10 - Copyright (C) 2021 Real Time Engineers Ltd.
|
|
|
++ All rights reserved
|
|
|
++
|
|
|
++ VISIT http://www.FreeRTOS.org TO ENSURE YOU ARE USING THE LATEST VERSION.
|
|
|
++
|
|
|
++ This file is part of the FreeRTOS distribution.
|
|
|
++
|
|
|
++ FreeRTOS is free software; you can redistribute it and/or modify it under
|
|
|
++ the terms of the GNU General Public License (version 2) as published by the
|
|
|
++ Free Software Foundation >>!AND MODIFIED BY!<< the FreeRTOS exception.
|
|
|
++
|
|
|
++ ***************************************************************************
|
|
|
++ >>! NOTE: The modification to the GPL is included to allow you to !<<
|
|
|
++ >>! distribute a combined work that includes FreeRTOS without being !<<
|
|
|
++ >>! obliged to provide the source code for proprietary components !<<
|
|
|
++ >>! outside of the FreeRTOS kernel. !<<
|
|
|
++ ***************************************************************************
|
|
|
++
|
|
|
++ FreeRTOS is distributed in the hope that it will be useful, but WITHOUT ANY
|
|
|
++ WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS
|
|
|
++ FOR A PARTICULAR PURPOSE. Full license text is available on the following
|
|
|
++ link: http://www.freertos.org/a00114.html
|
|
|
++
|
|
|
++ ***************************************************************************
|
|
|
++ * *
|
|
|
++ * FreeRTOS provides completely free yet professionally developed, *
|
|
|
++ * robust, strictly quality controlled, supported, and cross *
|
|
|
++ * platform software that is more than just the market leader, it *
|
|
|
++ * is the industry's de facto standard. *
|
|
|
++ * *
|
|
|
++ * Help yourself get started quickly while simultaneously helping *
|
|
|
++ * to support the FreeRTOS project by purchasing a FreeRTOS *
|
|
|
++ * tutorial book, reference manual, or both: *
|
|
|
++ * http://www.FreeRTOS.org/Documentation *
|
|
|
++ * *
|
|
|
++ ***************************************************************************
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/FAQHelp.html - Having a problem? Start by reading
|
|
|
++ the FAQ page "My application does not run, what could be wrong?". Have you
|
|
|
++ defined configASSERT()?
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/support - In return for receiving this top quality
|
|
|
++ embedded software for free we request you assist our global community by
|
|
|
++ participating in the support forum.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/training - Investing in training allows your team to
|
|
|
++ be as productive as possible as early as possible. Now you can receive
|
|
|
++ FreeRTOS training directly from Richard Barry, CEO of Real Time Engineers
|
|
|
++ Ltd, and the world's leading authority on the world's leading RTOS.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,
|
|
|
++ including FreeRTOS+Trace - an indispensable productivity tool, a DOS
|
|
|
++ compatible FAT file system, and our tiny thread aware UDP/IP stack.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.
|
|
|
++ Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.
|
|
|
++
|
|
|
++ http://www.OpenRTOS.com - Real Time Engineers ltd. license FreeRTOS to High
|
|
|
++ Integrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOS
|
|
|
++ licenses offer ticketed support, indemnification and commercial middleware.
|
|
|
++
|
|
|
++ http://www.SafeRTOS.com - High Integrity Systems also provide a safety
|
|
|
++ engineered and independently SIL3 certified version for use in safety and
|
|
|
++ mission critical applications that require provable dependability.
|
|
|
++
|
|
|
++ 1 tab == 4 spaces!
|
|
|
++*/
|
|
|
++
|
|
|
++#ifndef FREERTOS_CONFIG_RISCV_H
|
|
|
++#define FREERTOS_CONFIG_RISCV_H
|
|
|
++
|
|
|
++// This file is included in the common FreeRTOSConfig.h.
|
|
|
++
|
|
|
++#include "sdkconfig.h"
|
|
|
++
|
|
|
++#define configUSE_PORT_OPTIMISED_TASK_SELECTION 0
|
|
|
++
|
|
|
++#ifndef __ASSEMBLER__
|
|
|
++#if CONFIG_IDF_TARGET_ESP32C3
|
|
|
++#include "esp32c3/rom/ets_sys.h"
|
|
|
++#elif CONFIG_IDF_TARGET_ESP32H2
|
|
|
++#include "esp32h2/rom/ets_sys.h"
|
|
|
++#endif
|
|
|
++#endif // __ASSEMBLER__
|
|
|
++
|
|
|
++/* The maximum interrupt priority from which FreeRTOS.org API functions can
|
|
|
++ be called. Only API functions that end in ...FromISR() can be used within
|
|
|
++ interrupts. */
|
|
|
++#define configMAX_SYSCALL_INTERRUPT_PRIORITY 0
|
|
|
++
|
|
|
++#ifndef configISR_STACK_SIZE
|
|
|
++#define configISR_STACK_SIZE (CONFIG_FREERTOS_ISR_STACKSIZE)
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifndef __ASSEMBLER__
|
|
|
++#if CONFIG_APPTRACE_SV_ENABLE
|
|
|
++extern int xPortSwitchFlag;
|
|
|
++#define os_task_switch_is_pended(_cpu_) (xPortSwitchFlag)
|
|
|
++#else
|
|
|
++#define os_task_switch_is_pended(_cpu_) (false)
|
|
|
++#endif
|
|
|
++#endif
|
|
|
++
|
|
|
++#endif // FREERTOS_CONFIG_RISCV_H
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..ce683ac301
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro.h
|
|
|
+@@ -0,0 +1,107 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++
|
|
|
++#ifndef PORTMACRO_H
|
|
|
++ #define PORTMACRO_H
|
|
|
++
|
|
|
++ #ifdef __cplusplus
|
|
|
++ extern "C" {
|
|
|
++ #endif
|
|
|
++
|
|
|
++/*-----------------------------------------------------------
|
|
|
++ * Port specific definitions.
|
|
|
++ *
|
|
|
++ * The settings in this file configure FreeRTOS correctly for the
|
|
|
++ * given hardware and compiler.
|
|
|
++ *
|
|
|
++ * These settings should not be altered.
|
|
|
++ *-----------------------------------------------------------
|
|
|
++ */
|
|
|
++
|
|
|
++/* Type definitions. */
|
|
|
++ #define portCHAR char
|
|
|
++ #define portFLOAT float
|
|
|
++ #define portDOUBLE double
|
|
|
++ #define portLONG long
|
|
|
++ #define portSHORT short
|
|
|
++ #define portSTACK_TYPE rt_ubase_t
|
|
|
++ #define portBASE_TYPE rt_base_t
|
|
|
++
|
|
|
++ typedef portSTACK_TYPE StackType_t;
|
|
|
++ typedef rt_base_t BaseType_t;
|
|
|
++ typedef rt_ubase_t UBaseType_t;
|
|
|
++ typedef rt_tick_t TickType_t;
|
|
|
++ #define portMAX_DELAY ( TickType_t ) RT_TICK_MAX
|
|
|
++
|
|
|
++ struct rt_semaphore_wrapper
|
|
|
++ {
|
|
|
++ struct rt_semaphore sem;
|
|
|
++ rt_uint16_t max_value;
|
|
|
++ };
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* Architecture specifics. */
|
|
|
++ #define portBYTE_ALIGNMENT RT_ALIGN_SIZE
|
|
|
++ #define portPOINTER_SIZE_TYPE rt_size_t
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* Scheduler utilities. */
|
|
|
++ #define portYIELD() rt_thread_yield()
|
|
|
++ #define portYIELD_FROM_ISR( x ) rt_thread_yield()
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* Critical section management. */
|
|
|
++ extern void vPortEnterCritical( void );
|
|
|
++ extern void vPortExitCritical( void );
|
|
|
++ #define portSET_INTERRUPT_MASK_FROM_ISR() rt_hw_interrupt_disable()
|
|
|
++ #define portCLEAR_INTERRUPT_MASK_FROM_ISR( x ) rt_hw_interrupt_enable( x )
|
|
|
++ #define portDISABLE_INTERRUPTS() vPortEnterCritical()
|
|
|
++ #define portENABLE_INTERRUPTS() vPortExitCritical()
|
|
|
++ //#define portENTER_CRITICAL() vPortEnterCritical()
|
|
|
++ //#define portEXIT_CRITICAL() vPortExitCritical()
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* Use this macro to calculate the buffer size when allocating a queue statically
|
|
|
++ * To ensure the buffer can fit the desired number of messages
|
|
|
++ */
|
|
|
++ #define QUEUE_BUFFER_SIZE( uxQueueLength, uxItemSize ) ( ( RT_ALIGN( uxItemSize, RT_ALIGN_SIZE ) + sizeof( void * ) ) * uxQueueLength )
|
|
|
++
|
|
|
++ BaseType_t rt_err_to_freertos(rt_err_t rt_err);
|
|
|
++
|
|
|
++/* For ESP32 */
|
|
|
++ #include "portmacro_esp32c3.h"
|
|
|
++
|
|
|
++ #ifdef __cplusplus
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++#endif /* PORTMACRO_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_deprecated.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_deprecated.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..597d99c333
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_deprecated.h
|
|
|
+@@ -0,0 +1,94 @@
|
|
|
++/*
|
|
|
++ * SPDX-FileCopyrightText: 2017-2021 Espressif Systems (Shanghai) CO LTD
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: Apache-2.0
|
|
|
++ */
|
|
|
++
|
|
|
++/* ---------------------------------------------------- Deprecate ------------------------------------------------------
|
|
|
++ * - Macros or functions that should be deprecated in v5.0, then removed in the next major release
|
|
|
++ * - Kept as not to cause a breaking change
|
|
|
++ * - Include this header at the end of portmacro.h
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Disable interrupts in a nested manner
|
|
|
++ *
|
|
|
++ * Does the exact same thing as portSET_INTERRUPT_MASK_FROM_ISR()
|
|
|
++ *
|
|
|
++ * @deprecated This function is deprecated. Call portSET_INTERRUPT_MASK_FROM_ISR() instead
|
|
|
++ */
|
|
|
++static inline __attribute__((deprecated)) UBaseType_t portENTER_CRITICAL_NESTED(void) {
|
|
|
++ return portSET_INTERRUPT_MASK_FROM_ISR();
|
|
|
++}
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Reenables interrupts in a nested manner
|
|
|
++ *
|
|
|
++ * Does the exact same thing as portCLEAR_INTERRUPT_MASK_FROM_ISR()
|
|
|
++ *
|
|
|
++ * @deprecated This function is deprecated. Call portCLEAR_INTERRUPT_MASK_FROM_ISR() instead
|
|
|
++ */
|
|
|
++static inline void __attribute__((deprecated)) portEXIT_CRITICAL_NESTED(UBaseType_t prev_level)
|
|
|
++{
|
|
|
++ portCLEAR_INTERRUPT_MASK_FROM_ISR(prev_level);
|
|
|
++}
|
|
|
++
|
|
|
++/* ---------------------- Spinlocks --------------------- */
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Deprecated placed holder function to initialize a spinlock
|
|
|
++ *
|
|
|
++ * Currently does nothing.
|
|
|
++ *
|
|
|
++ * @deprecated This function is deprecated. If on multi-core, use spinlock_initialize() instead
|
|
|
++ * @param[in] mux Spinlock
|
|
|
++ */
|
|
|
++static inline void __attribute__((deprecated)) __attribute__((always_inline)) vPortCPUInitializeMutex(portMUX_TYPE *mux)
|
|
|
++{
|
|
|
++ (void)mux;
|
|
|
++}
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Deprecated placed holder function to acquire a spinlock
|
|
|
++ *
|
|
|
++ * Currently does nothing.
|
|
|
++ *
|
|
|
++ * @deprecated This function is deprecated. If on multi-core, use spinlock_acquire() instead
|
|
|
++ * @param[in] mux Spinlock
|
|
|
++ */
|
|
|
++static inline void __attribute__((deprecated)) __attribute__((always_inline)) vPortCPUAcquireMutex(portMUX_TYPE *mux)
|
|
|
++{
|
|
|
++ (void)mux;
|
|
|
++}
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Deprecated placed holder function to acquire a spinlock but with a specified timeout
|
|
|
++ *
|
|
|
++ * Currently just returns true
|
|
|
++ *
|
|
|
++ * @deprecated This function is deprecated. If on multi-core, use spinlock_acquire() instead
|
|
|
++ * @note Does not have deprecated attribute due to usage in app_trace_util.c
|
|
|
++ * @param[in] mux Spinlock
|
|
|
++ * @param[in] timeout Timeout in number of CPU cycles
|
|
|
++ * @return true Always returns true
|
|
|
++ */
|
|
|
++static inline bool __attribute__((always_inline)) vPortCPUAcquireMutexTimeout(portMUX_TYPE *mux, int timeout_cycles)
|
|
|
++{
|
|
|
++ (void)mux;
|
|
|
++ (void)timeout_cycles;
|
|
|
++ return true;
|
|
|
++}
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Deprecated placed holder function to release a spinlock
|
|
|
++ *
|
|
|
++ * Currently does nothing.
|
|
|
++ *
|
|
|
++ * @deprecated This function is deprecated. If on multi-core, use spinlock_release() instead
|
|
|
++ * @note Does not have deprecated attribute due to usage in app_trace_util.c
|
|
|
++ * @param[in] mux Spinlock
|
|
|
++ */
|
|
|
++static inline void __attribute__((always_inline)) vPortCPUReleaseMutex(portMUX_TYPE *mux)
|
|
|
++{
|
|
|
++ (void)mux;
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_esp32c3.h b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_esp32c3.h
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..88459bb6a2
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/include/freertos/portmacro_esp32c3.h
|
|
|
+@@ -0,0 +1,424 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.3
|
|
|
++ * Copyright (C) 2019 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * http://www.FreeRTOS.org
|
|
|
++ * http://aws.amazon.com/freertos
|
|
|
++ *
|
|
|
++ * 1 tab == 4 spaces!
|
|
|
++ */
|
|
|
++
|
|
|
++#ifndef PORTMACRO_ESP32C3_H
|
|
|
++#define PORTMACRO_ESP32C3_H
|
|
|
++
|
|
|
++#ifndef __ASSEMBLER__
|
|
|
++
|
|
|
++#include "sdkconfig.h"
|
|
|
++#include <stdint.h>
|
|
|
++#include <stdlib.h>
|
|
|
++#include <stdbool.h>
|
|
|
++#include <stdio.h>
|
|
|
++#include "soc/spinlock.h"
|
|
|
++#include "soc/interrupt_core0_reg.h"
|
|
|
++#include "soc/cpu.h"
|
|
|
++#include "esp_attr.h"
|
|
|
++#include "esp_rom_sys.h"
|
|
|
++#include "esp_timer.h" /* required for FreeRTOS run time stats */
|
|
|
++#include "esp_heap_caps.h"
|
|
|
++#include "esp_system.h" /* required by esp_get_...() functions in portable.h. [refactor-todo] Update portable.h */
|
|
|
++#include "esp_newlib.h"
|
|
|
++//#include "portbenchmark.h"
|
|
|
++
|
|
|
++/* [refactor-todo] These includes are not directly used in this file. They are kept into to prevent a breaking change. Remove these. */
|
|
|
++#include <limits.h>
|
|
|
++#ifdef CONFIG_LEGACY_INCLUDE_COMMON_HEADERS
|
|
|
++#include "soc/soc_memory_layout.h"
|
|
|
++#endif
|
|
|
++
|
|
|
++#ifdef __cplusplus
|
|
|
++extern "C" {
|
|
|
++#endif
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* --------------------------------------------------- Port Types ------------------------------------------------------
|
|
|
++ * - Port specific types.
|
|
|
++ * - The settings in this file configure FreeRTOS correctly for the given hardware and compiler.
|
|
|
++ * - These settings should not be altered.
|
|
|
++ * - The port types must come first as they are used further down in this file
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++/* Task function macros as described on the FreeRTOS.org WEB site. */
|
|
|
++#define portTASK_FUNCTION_PROTO(vFunction, pvParameters) void vFunction(void *pvParameters)
|
|
|
++#define portTASK_FUNCTION(vFunction, pvParameters) void vFunction(void *pvParameters)
|
|
|
++
|
|
|
++// interrupt module will mask interrupt with priority less than threshold
|
|
|
++#define RVHAL_EXCM_LEVEL 4
|
|
|
++
|
|
|
++
|
|
|
++/* ----------------------------------------------- Port Configurations -------------------------------------------------
|
|
|
++ * - Configurations values supplied by each port
|
|
|
++ * - Required by FreeRTOS
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++#define portCRITICAL_NESTING_IN_TCB 0
|
|
|
++#define portSTACK_GROWTH (-1)
|
|
|
++#define portTICK_PERIOD_MS ((TickType_t) (1000 / configTICK_RATE_HZ))
|
|
|
++#define portNOP() __asm volatile (" nop ")
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ---------------------------------------------- Forward Declarations -------------------------------------------------
|
|
|
++ * - Forward declarations of all the port functions and macros need to implement the FreeRTOS porting interface
|
|
|
++ * - These must come before definition/declaration of the FreeRTOS porting interface
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++// --------------------- Interrupts ------------------------
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Checks if the current core is in an ISR context
|
|
|
++ *
|
|
|
++ * - ISR context consist of Low/Mid priority ISR, or time tick ISR
|
|
|
++ * - High priority ISRs aren't detected here, but they normally cannot call C code, so that should not be an issue anyway.
|
|
|
++ *
|
|
|
++ * @note [refactor-todo] Check if this should be inlined
|
|
|
++ * @return
|
|
|
++ * - pdTRUE if in ISR
|
|
|
++ * - pdFALSE otherwise
|
|
|
++ */
|
|
|
++BaseType_t xPortInIsrContext(void);
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Check if in ISR context from High priority ISRs
|
|
|
++ *
|
|
|
++ * - Called from High priority ISR
|
|
|
++ * - Checks if the previous context (before high priority interrupt) was in ISR context (meaning low/med priority)
|
|
|
++ *
|
|
|
++ * @note [refactor-todo] Check if this should be inlined
|
|
|
++ * @return
|
|
|
++ * - pdTRUE if in previous in ISR context
|
|
|
++ * - pdFALSE otherwise
|
|
|
++ */
|
|
|
++BaseType_t xPortInterruptedFromISRContext(void);
|
|
|
++
|
|
|
++/* ---------------------- Spinlocks ------------------------
|
|
|
++ - Spinlocks added to match API with SMP FreeRTOS. Single core RISC-V does not need spin locks
|
|
|
++ - Because single core does not have a primitive spinlock data type, we have to implement one here
|
|
|
++ * @note [refactor-todo] Refactor critical section API so that this is no longer required
|
|
|
++ * ------------------------------------------------------ */
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Spinlock object
|
|
|
++ * Owner:
|
|
|
++ * - Set to 0 if uninitialized
|
|
|
++ * - Set to portMUX_FREE_VAL when free
|
|
|
++ * - Set to CORE_ID_REGVAL_PRO or CORE_ID_REGVAL_AP when locked
|
|
|
++ * - Any other value indicates corruption
|
|
|
++ * Count:
|
|
|
++ * - 0 if unlocked
|
|
|
++ * - Recursive count if locked
|
|
|
++ *
|
|
|
++ * @note Not a true spinlock as single core RISC-V does not have atomic compare and set instruction
|
|
|
++ * @note Keep portMUX_INITIALIZER_UNLOCKED in sync with this struct
|
|
|
++ */
|
|
|
++typedef struct {
|
|
|
++ uint32_t owner;
|
|
|
++ uint32_t count;
|
|
|
++} portMUX_TYPE;
|
|
|
++/**< Spinlock initializer */
|
|
|
++#define portMUX_INITIALIZER_UNLOCKED { \
|
|
|
++ .owner = portMUX_FREE_VAL, \
|
|
|
++ .count = 0, \
|
|
|
++ }
|
|
|
++#define portMUX_FREE_VAL SPINLOCK_FREE /**< Spinlock is free. [refactor-todo] check if this is still required */
|
|
|
++#define portMUX_NO_TIMEOUT SPINLOCK_WAIT_FOREVER /**< When passed for 'timeout_cycles', spin forever if necessary. [refactor-todo] check if this is still required */
|
|
|
++#define portMUX_TRY_LOCK SPINLOCK_NO_WAIT /**< Try to acquire the spinlock a single time only. [refactor-todo] check if this is still required */
|
|
|
++#define portMUX_INITIALIZE(mux) ({ \
|
|
|
++ (mux)->owner = portMUX_FREE_VAL; \
|
|
|
++ (mux)->count = 0; \
|
|
|
++})
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Wrapper for atomic compare-and-set instruction
|
|
|
++ *
|
|
|
++ * @note Isn't a real atomic CAS.
|
|
|
++ * @note [refactor-todo] check if we still need this
|
|
|
++ * @note [refactor-todo] Check if this function should be renamed (due to void return type)
|
|
|
++ *
|
|
|
++ * @param[inout] addr Pointer to target address
|
|
|
++ * @param[in] compare Compare value
|
|
|
++ * @param[inout] set Pointer to set value
|
|
|
++ */
|
|
|
++static inline void __attribute__((always_inline)) uxPortCompareSet(volatile uint32_t *addr, uint32_t compare, uint32_t *set);
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Wrapper for atomic compare-and-set instruction in external RAM
|
|
|
++ *
|
|
|
++ * @note Isn't a real atomic CAS.
|
|
|
++ * @note [refactor-todo] check if we still need this
|
|
|
++ * @note [refactor-todo] Check if this function should be renamed (due to void return type)
|
|
|
++ *
|
|
|
++ * @param[inout] addr Pointer to target address
|
|
|
++ * @param[in] compare Compare value
|
|
|
++ * @param[inout] set Pointer to set value
|
|
|
++ */
|
|
|
++static inline void uxPortCompareSetExtram(volatile uint32_t *addr, uint32_t compare, uint32_t *set);
|
|
|
++
|
|
|
++// ---------------------- Yielding -------------------------
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Perform a context switch from a task
|
|
|
++ *
|
|
|
++ * @note [refactor-todo] The rest of ESP-IDF should call taskYield() instead
|
|
|
++ */
|
|
|
++#define vPortYield() portYIELD()
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Perform a context switch from an ISR
|
|
|
++ */
|
|
|
++#define vPortYieldFromISR() portYIELD_FROM_ISR(0)
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Checks if the current core can yield
|
|
|
++ *
|
|
|
++ * - A core cannot yield if its in an ISR or in a critical section
|
|
|
++ *
|
|
|
++ * @note [refactor-todo] See if this can be separated from port macro
|
|
|
++ * @note [refactor-todo] Check if this function should be renamed (due to bool return type)
|
|
|
++ * @return true Core can yield
|
|
|
++ * @return false Core cannot yield
|
|
|
++ */
|
|
|
++static inline bool IRAM_ATTR xPortCanYield(void);
|
|
|
++
|
|
|
++// ------------------- Hook Functions ----------------------
|
|
|
++
|
|
|
++extern void esp_vApplicationIdleHook(void);
|
|
|
++extern void esp_vApplicationTickHook(void);
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Hook function called on entry to tickless idle
|
|
|
++ *
|
|
|
++ * - Implemented in pm_impl.c
|
|
|
++ *
|
|
|
++ * @param xExpectedIdleTime Expected idle time
|
|
|
++ */
|
|
|
++void vApplicationSleep(TickType_t xExpectedIdleTime);
|
|
|
++
|
|
|
++// ----------------------- System --------------------------
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Get the tick rate per second
|
|
|
++ *
|
|
|
++ * @note [refactor-todo] make this inline
|
|
|
++ * @note [refactor-todo] Check if this function should be renamed (due to uint return type)
|
|
|
++ * @return uint32_t Tick rate in Hz
|
|
|
++ */
|
|
|
++uint32_t xPortGetTickRateHz(void);
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Set a watchpoint to watch the last 32 bytes of the stack
|
|
|
++ *
|
|
|
++ * Callback to set a watchpoint on the end of the stack. Called every context switch to change the stack watchpoint
|
|
|
++ * around.
|
|
|
++ *
|
|
|
++ * @param pxStackStart Pointer to the start of the stack
|
|
|
++ */
|
|
|
++void vPortSetStackWatchpoint(void *pxStackStart);
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Get the current core's ID
|
|
|
++ *
|
|
|
++ * @note Added to be compatible with SMP API
|
|
|
++ * @note [refactor-todo] IDF should call a FreeRTOS like macro instead of port function directly
|
|
|
++ * @return BaseType_t Core ID
|
|
|
++ */
|
|
|
++static inline BaseType_t IRAM_ATTR xPortGetCoreID(void)
|
|
|
++{
|
|
|
++ return (uint32_t) cpu_hal_get_core_id();
|
|
|
++}
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ------------------------------------------- FreeRTOS Porting Interface ----------------------------------------------
|
|
|
++ * - Contains all the mappings of the macros required by FreeRTOS
|
|
|
++ * - Most come after forward declare as porting macros map to declared functions
|
|
|
++ * - Maps to forward declared functions
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++// ----------------------- Memory --------------------------
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Task memory allocation macros
|
|
|
++ *
|
|
|
++ * @note Because the ROM routines don't necessarily handle a stack in external RAM correctly, we force the stack
|
|
|
++ * memory to always be internal.
|
|
|
++ * @note [refactor-todo] Update portable.h to match v10.4.3 to use new malloc prototypes
|
|
|
++ */
|
|
|
++#define portTcbMemoryCaps (MALLOC_CAP_INTERNAL|MALLOC_CAP_8BIT)
|
|
|
++#define portStackMemoryCaps (MALLOC_CAP_INTERNAL|MALLOC_CAP_8BIT)
|
|
|
++#define pvPortMallocTcbMem(size) pvPortMalloc(size)
|
|
|
++#define pvPortMallocStackMem(size) pvPortMalloc(size)
|
|
|
++
|
|
|
++// ------------------ Critical Sections --------------------
|
|
|
++#define portENTER_CRITICAL(mux) {(void)mux; vPortEnterCritical();}
|
|
|
++#define portEXIT_CRITICAL(mux) {(void)mux; vPortExitCritical();}
|
|
|
++#define portTRY_ENTER_CRITICAL(mux, timeout) ({ \
|
|
|
++ (void)mux; (void)timeout; \
|
|
|
++ vPortEnterCritical(); \
|
|
|
++ BaseType_t ret = pdPASS; \
|
|
|
++ ret; \
|
|
|
++})
|
|
|
++//In single-core RISC-V, we can use the same critical section API
|
|
|
++#define portENTER_CRITICAL_ISR(mux) portENTER_CRITICAL(mux)
|
|
|
++#define portEXIT_CRITICAL_ISR(mux) portEXIT_CRITICAL(mux)
|
|
|
++#define portTRY_ENTER_CRITICAL_ISR(mux, timeout) portTRY_ENTER_CRITICAL(mux, timeout)
|
|
|
++
|
|
|
++/* [refactor-todo] on RISC-V, both ISR and non-ISR cases result in the same call. We can redefine this macro */
|
|
|
++#define portENTER_CRITICAL_SAFE(mux) ({ \
|
|
|
++ if (xPortInIsrContext()) { \
|
|
|
++ portENTER_CRITICAL_ISR(mux); \
|
|
|
++ } else { \
|
|
|
++ portENTER_CRITICAL(mux); \
|
|
|
++ } \
|
|
|
++})
|
|
|
++#define portEXIT_CRITICAL_SAFE(mux) ({ \
|
|
|
++ if (xPortInIsrContext()) { \
|
|
|
++ portEXIT_CRITICAL_ISR(mux); \
|
|
|
++ } else { \
|
|
|
++ portEXIT_CRITICAL(mux); \
|
|
|
++ } \
|
|
|
++})
|
|
|
++#define portTRY_ENTER_CRITICAL_SAFE(mux, timeout) portENTER_CRITICAL_SAFE(mux, timeout)
|
|
|
++
|
|
|
++// ---------------------- Yielding -------------------------
|
|
|
++
|
|
|
++#define portEND_SWITCHING_ISR(xSwitchRequired) if(xSwitchRequired) vPortYield()
|
|
|
++/* Yielding within an API call (when interrupts are off), means the yield should be delayed
|
|
|
++ until interrupts are re-enabled.
|
|
|
++ To do this, we use the "cross-core" interrupt as a trigger to yield on this core when interrupts are re-enabled.This
|
|
|
++ is the same interrupt & code path which is used to trigger a yield between CPUs, although in this case the yield is
|
|
|
++ happening on the same CPU.
|
|
|
++*/
|
|
|
++#define portYIELD_WITHIN_API() portYIELD()
|
|
|
++
|
|
|
++// ------------------- Hook Functions ----------------------
|
|
|
++
|
|
|
++#ifndef CONFIG_FREERTOS_LEGACY_HOOKS
|
|
|
++#define vApplicationIdleHook esp_vApplicationIdleHook
|
|
|
++#define vApplicationTickHook esp_vApplicationTickHook
|
|
|
++#endif /* !CONFIG_FREERTOS_LEGACY_HOOKS */
|
|
|
++#define portSUPPRESS_TICKS_AND_SLEEP(idleTime) vApplicationSleep(idleTime)
|
|
|
++
|
|
|
++// ------------------- Run Time Stats ----------------------
|
|
|
++
|
|
|
++#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()
|
|
|
++#define portGET_RUN_TIME_COUNTER_VALUE() 0
|
|
|
++#ifdef CONFIG_FREERTOS_RUN_TIME_STATS_USING_ESP_TIMER
|
|
|
++/* Coarse resolution time (us) */
|
|
|
++#define portALT_GET_RUN_TIME_COUNTER_VALUE(x) do {x = (uint32_t)esp_timer_get_time();} while(0)
|
|
|
++#endif
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* --------------------------------------------- Inline Implementations ------------------------------------------------
|
|
|
++ * - Implementation of inline functions of the forward declares
|
|
|
++ * - Should come after forward declare and FreeRTOS Porting interface, as implementation may use both.
|
|
|
++ * - For implementation of non-inlined functions, see port.c, port_common.c, or other assembly files
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++// --------------------- Interrupts ------------------------
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++// ---------------------- Spinlocks ------------------------
|
|
|
++
|
|
|
++static inline void __attribute__((always_inline)) uxPortCompareSet(volatile uint32_t *addr, uint32_t compare, uint32_t *set)
|
|
|
++{
|
|
|
++ compare_and_set_native(addr, compare, set);
|
|
|
++}
|
|
|
++
|
|
|
++static inline void uxPortCompareSetExtram(volatile uint32_t *addr, uint32_t compare, uint32_t *set)
|
|
|
++{
|
|
|
++#if defined(CONFIG_SPIRAM)
|
|
|
++ compare_and_set_extram(addr, compare, set);
|
|
|
++#endif
|
|
|
++}
|
|
|
++
|
|
|
++// ---------------------- Yielding -------------------------
|
|
|
++
|
|
|
++static inline bool IRAM_ATTR xPortCanYield(void)
|
|
|
++{
|
|
|
++ uint32_t threshold = REG_READ(INTERRUPT_CORE0_CPU_INT_THRESH_REG);
|
|
|
++ /* when enter critical code, FreeRTOS will mask threshold to RVHAL_EXCM_LEVEL
|
|
|
++ * and exit critical code, will recover threshold value (1). so threshold <= 1
|
|
|
++ * means not in critical code
|
|
|
++ */
|
|
|
++ return (threshold <= 1);
|
|
|
++}
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ------------------------------------------------------ Misc ---------------------------------------------------------
|
|
|
++ * - Miscellaneous porting macros
|
|
|
++ * - These are not port of the FreeRTOS porting interface, but are used by other FreeRTOS dependent components
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++// -------------------- Heap Related -----------------------
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Checks if a given piece of memory can be used to store a task's TCB
|
|
|
++ *
|
|
|
++ * - Defined in port_common.c
|
|
|
++ *
|
|
|
++ * @param ptr Pointer to memory
|
|
|
++ * @return true Memory can be used to store a TCB
|
|
|
++ * @return false Otherwise
|
|
|
++ */
|
|
|
++bool xPortCheckValidTCBMem(const void *ptr);
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief Checks if a given piece of memory can be used to store a task's stack
|
|
|
++ *
|
|
|
++ * - Defined in port_common.c
|
|
|
++ *
|
|
|
++ * @param ptr Pointer to memory
|
|
|
++ * @return true Memory can be used to store a task stack
|
|
|
++ * @return false Otherwise
|
|
|
++ */
|
|
|
++bool xPortcheckValidStackMem(const void *ptr);
|
|
|
++
|
|
|
++#define portVALID_TCB_MEM(ptr) xPortCheckValidTCBMem(ptr)
|
|
|
++#define portVALID_STACK_MEM(ptr) xPortcheckValidStackMem(ptr)
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ---------------------------------------------------- Deprecate ------------------------------------------------------
|
|
|
++ * - Pull in header containing deprecated macros here
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++#include "portmacro_deprecated.h"
|
|
|
++
|
|
|
++#ifdef __cplusplus
|
|
|
++}
|
|
|
++#endif
|
|
|
++
|
|
|
++#endif //__ASSEMBLER__
|
|
|
++
|
|
|
++#endif /* PORTMACRO_H */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..9d8195f832
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port.c
|
|
|
+@@ -0,0 +1,44 @@
|
|
|
++#include <FreeRTOS.h>
|
|
|
++
|
|
|
++static rt_base_t level = 0;
|
|
|
++static rt_base_t critical_nesting = 0;
|
|
|
++
|
|
|
++void vPortEnterCritical( void )
|
|
|
++{
|
|
|
++ if ( critical_nesting == 0 )
|
|
|
++ {
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ }
|
|
|
++ critical_nesting += 1;
|
|
|
++}
|
|
|
++
|
|
|
++void vPortExitCritical( void )
|
|
|
++{
|
|
|
++ critical_nesting -= 1;
|
|
|
++ if ( critical_nesting == 0 )
|
|
|
++ {
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++}
|
|
|
++
|
|
|
++void vPortEndScheduler( void )
|
|
|
++{
|
|
|
++ /* Not implemented in ports where there is nothing to return to. */
|
|
|
++}
|
|
|
++
|
|
|
++BaseType_t rt_err_to_freertos(rt_err_t rt_err)
|
|
|
++{
|
|
|
++ switch(-rt_err)
|
|
|
++ {
|
|
|
++ case RT_EOK:
|
|
|
++ return pdPASS;
|
|
|
++ case RT_ENOMEM:
|
|
|
++ return errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;
|
|
|
++ case RT_EFULL:
|
|
|
++ return errQUEUE_FULL;
|
|
|
++ case RT_EEMPTY:
|
|
|
++ return errQUEUE_EMPTY;
|
|
|
++ default:
|
|
|
++ return pdFAIL;
|
|
|
++ }
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port_esp32c3.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port_esp32c3.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..64fbe9b15b
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/port/rt-thread/port_esp32c3.c
|
|
|
+@@ -0,0 +1,197 @@
|
|
|
++/*
|
|
|
++ FreeRTOS V8.2.3 - Copyright (C) 2015 Real Time Engineers Ltd.
|
|
|
++ All rights reserved
|
|
|
++
|
|
|
++ VISIT http://www.FreeRTOS.org TO ENSURE YOU ARE USING THE LATEST VERSION.
|
|
|
++
|
|
|
++ This file is part of the FreeRTOS distribution and was contributed
|
|
|
++ to the project by Technolution B.V. (www.technolution.nl,
|
|
|
++ freertos-riscv@technolution.eu) under the terms of the FreeRTOS
|
|
|
++ contributors license.
|
|
|
++
|
|
|
++ FreeRTOS is free software; you can redistribute it and/or modify it under
|
|
|
++ the terms of the GNU General Public License (version 2) as published by the
|
|
|
++ Free Software Foundation >>>> AND MODIFIED BY <<<< the FreeRTOS exception.
|
|
|
++
|
|
|
++ ***************************************************************************
|
|
|
++ >>! NOTE: The modification to the GPL is included to allow you to !<<
|
|
|
++ >>! distribute a combined work that includes FreeRTOS without being !<<
|
|
|
++ >>! obliged to provide the source code for proprietary components !<<
|
|
|
++ >>! outside of the FreeRTOS kernel. !<<
|
|
|
++ ***************************************************************************
|
|
|
++
|
|
|
++ FreeRTOS is distributed in the hope that it will be useful, but WITHOUT ANY
|
|
|
++ WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS
|
|
|
++ FOR A PARTICULAR PURPOSE. Full license text is available on the following
|
|
|
++ link: http://www.freertos.org/a00114.html
|
|
|
++
|
|
|
++ ***************************************************************************
|
|
|
++ * *
|
|
|
++ * FreeRTOS provides completely free yet professionally developed, *
|
|
|
++ * robust, strictly quality controlled, supported, and cross *
|
|
|
++ * platform software that is more than just the market leader, it *
|
|
|
++ * is the industry's de facto standard. *
|
|
|
++ * *
|
|
|
++ * Help yourself get started quickly while simultaneously helping *
|
|
|
++ * to support the FreeRTOS project by purchasing a FreeRTOS *
|
|
|
++ * tutorial book, reference manual, or both: *
|
|
|
++ * http://www.FreeRTOS.org/Documentation *
|
|
|
++ * *
|
|
|
++ ***************************************************************************
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/FAQHelp.html - Having a problem? Start by reading
|
|
|
++ the FAQ page "My application does not run, what could be wrong?". Have you
|
|
|
++ defined configASSERT()?
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/support - In return for receiving this top quality
|
|
|
++ embedded software for free we request you assist our global community by
|
|
|
++ participating in the support forum.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/training - Investing in training allows your team to
|
|
|
++ be as productive as possible as early as possible. Now you can receive
|
|
|
++ FreeRTOS training directly from Richard Barry, CEO of Real Time Engineers
|
|
|
++ Ltd, and the world's leading authority on the world's leading RTOS.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,
|
|
|
++ including FreeRTOS+Trace - an indispensable productivity tool, a DOS
|
|
|
++ compatible FAT file system, and our tiny thread aware UDP/IP stack.
|
|
|
++
|
|
|
++ http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.
|
|
|
++ Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.
|
|
|
++
|
|
|
++ http://www.OpenRTOS.com - Real Time Engineers ltd. license FreeRTOS to High
|
|
|
++ Integrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOS
|
|
|
++ licenses offer ticketed support, indemnification and commercial middleware.
|
|
|
++
|
|
|
++ http://www.SafeRTOS.com - High Integrity Systems also provide a safety
|
|
|
++ engineered and independently SIL3 certified version for use in safety and
|
|
|
++ mission critical applications that require provable dependability.
|
|
|
++
|
|
|
++ 1 tab == 4 spaces!
|
|
|
++*/
|
|
|
++
|
|
|
++/*-----------------------------------------------------------------------
|
|
|
++ * Implementation of functions defined in portable.h for the RISC-V port.
|
|
|
++ *----------------------------------------------------------------------*/
|
|
|
++
|
|
|
++#include "sdkconfig.h"
|
|
|
++#include <string.h>
|
|
|
++#include "soc/soc_caps.h"
|
|
|
++#include "soc/periph_defs.h"
|
|
|
++#include "soc/system_reg.h"
|
|
|
++#include "hal/systimer_hal.h"
|
|
|
++#include "hal/systimer_ll.h"
|
|
|
++#include "riscv/rvruntime-frames.h"
|
|
|
++#include "riscv/riscv_interrupts.h"
|
|
|
++#include "riscv/interrupt.h"
|
|
|
++#include "esp_private/crosscore_int.h"
|
|
|
++#include "esp_private/pm_trace.h"
|
|
|
++#include "esp_attr.h"
|
|
|
++#include "esp_system.h"
|
|
|
++#include "esp_intr_alloc.h"
|
|
|
++#include "esp_debug_helpers.h"
|
|
|
++#include "esp_log.h"
|
|
|
++#include "FreeRTOS.h" /* This pulls in portmacro.h */
|
|
|
++#include "task.h"
|
|
|
++#include "portmacro.h"
|
|
|
++//#include "port_systick.h"
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ---------------------------------------------------- Variables ------------------------------------------------------
|
|
|
++ *
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++static const char *TAG = "cpu_start"; // [refactor-todo]: might be appropriate to change in the future, but
|
|
|
++
|
|
|
++/**
|
|
|
++ * @brief A variable is used to keep track of the critical section nesting.
|
|
|
++ * @note This variable has to be stored as part of the task context and must be initialized to a non zero value
|
|
|
++ * to ensure interrupts don't inadvertently become unmasked before the scheduler starts.
|
|
|
++ * As it is stored as part of the task context it will automatically be set to 0 when the first task is started.
|
|
|
++ */
|
|
|
++static UBaseType_t uxCriticalNesting = 0;
|
|
|
++static UBaseType_t uxSavedInterruptState = 0;
|
|
|
++BaseType_t uxSchedulerRunning = 0;
|
|
|
++UBaseType_t uxInterruptNesting = 0;
|
|
|
++BaseType_t xPortSwitchFlag = 0;
|
|
|
++__attribute__((aligned(16))) static StackType_t xIsrStack[configISR_STACK_SIZE];
|
|
|
++StackType_t *xIsrStackTop = &xIsrStack[0] + (configISR_STACK_SIZE & (~((portPOINTER_SIZE_TYPE)portBYTE_ALIGNMENT_MASK)));
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ---------------------------------------------- Port Implementations -------------------------------------------------
|
|
|
++ *
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++// --------------------- Interrupts ------------------------
|
|
|
++
|
|
|
++BaseType_t xPortInIsrContext(void)
|
|
|
++{
|
|
|
++ return (BaseType_t)rt_interrupt_get_nest();
|
|
|
++}
|
|
|
++
|
|
|
++BaseType_t IRAM_ATTR xPortInterruptedFromISRContext(void)
|
|
|
++{
|
|
|
++ /* For single core, this can be the same as xPortInIsrContext() because reading it is atomic */
|
|
|
++ return (BaseType_t)rt_interrupt_get_nest();
|
|
|
++}
|
|
|
++
|
|
|
++// ---------------------- Spinlocks ------------------------
|
|
|
++
|
|
|
++
|
|
|
++// ---------------------- Yielding -------------------------
|
|
|
++
|
|
|
++
|
|
|
++// ------------------- Hook Functions ----------------------
|
|
|
++
|
|
|
++void __attribute__((weak)) vApplicationStackOverflowHook(TaskHandle_t xTask, char *pcTaskName)
|
|
|
++{
|
|
|
++#define ERR_STR1 "***ERROR*** A stack overflow in task "
|
|
|
++#define ERR_STR2 " has been detected."
|
|
|
++ const char *str[] = {ERR_STR1, pcTaskName, ERR_STR2};
|
|
|
++
|
|
|
++ char buf[sizeof(ERR_STR1) + CONFIG_FREERTOS_MAX_TASK_NAME_LEN + sizeof(ERR_STR2) + 1 /* null char */] = {0};
|
|
|
++
|
|
|
++ char *dest = buf;
|
|
|
++ for (int i = 0; i < sizeof(str) / sizeof(str[0]); i++) {
|
|
|
++ dest = strcat(dest, str[i]);
|
|
|
++ }
|
|
|
++ esp_system_abort(buf);
|
|
|
++}
|
|
|
++
|
|
|
++// ----------------------- System --------------------------
|
|
|
++
|
|
|
++uint32_t xPortGetTickRateHz(void)
|
|
|
++{
|
|
|
++ return (uint32_t)configTICK_RATE_HZ;
|
|
|
++}
|
|
|
++
|
|
|
++#define STACK_WATCH_AREA_SIZE 32
|
|
|
++#define STACK_WATCH_POINT_NUMBER (SOC_CPU_WATCHPOINTS_NUM - 1)
|
|
|
++
|
|
|
++void vPortSetStackWatchpoint(void *pxStackStart)
|
|
|
++{
|
|
|
++ uint32_t addr = (uint32_t)pxStackStart;
|
|
|
++ addr = (addr + (STACK_WATCH_AREA_SIZE - 1)) & (~(STACK_WATCH_AREA_SIZE - 1));
|
|
|
++ esp_cpu_set_watchpoint(STACK_WATCH_POINT_NUMBER, (char *)addr, STACK_WATCH_AREA_SIZE, ESP_WATCHPOINT_STORE);
|
|
|
++}
|
|
|
++
|
|
|
++
|
|
|
++
|
|
|
++/* ---------------------------------------------- Misc Implementations -------------------------------------------------
|
|
|
++ *
|
|
|
++ * ------------------------------------------------------------------------------------------------------------------ */
|
|
|
++
|
|
|
++// --------------------- App Start-up ----------------------
|
|
|
++
|
|
|
++/* [refactor-todo]: See if we can include this through a header */
|
|
|
++extern void esp_startup_start_app_common(void);
|
|
|
++
|
|
|
++void esp_startup_start_app(void)
|
|
|
++{
|
|
|
++ esp_startup_start_app_common();
|
|
|
++
|
|
|
++ ESP_LOGI(TAG, "Starting scheduler.");
|
|
|
++ vTaskStartScheduler();
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/queue.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/queue.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..8965e193d0
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/queue.c
|
|
|
+@@ -0,0 +1,787 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++#include <stdlib.h>
|
|
|
++#include <string.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "queue.h"
|
|
|
++
|
|
|
++/* Semaphores do not actually store or copy data, so have an item size of
|
|
|
++ * zero. */
|
|
|
++#define queueSEMAPHORE_QUEUE_ITEM_LENGTH ( ( UBaseType_t ) 0 )
|
|
|
++#define queueMUTEX_GIVE_BLOCK_TIME ( ( TickType_t ) 0U )
|
|
|
++
|
|
|
++typedef struct QueueDefinition
|
|
|
++{
|
|
|
++ struct rt_ipc_object *rt_ipc;
|
|
|
++} xQUEUE;
|
|
|
++typedef xQUEUE Queue_t;
|
|
|
++
|
|
|
++static volatile rt_uint8_t mutex_index = 0;
|
|
|
++static volatile rt_uint8_t sem_index = 0;
|
|
|
++static volatile rt_uint8_t queue_index = 0;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueGenericReset( QueueHandle_t xQueue,
|
|
|
++ BaseType_t xNewQueue )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++
|
|
|
++ configASSERT( pxQueue );
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++
|
|
|
++ if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ rt_sem_control( ( rt_sem_t ) pipc, RT_IPC_CMD_RESET, ( void * ) 0);
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ rt_mq_control( ( rt_mq_t ) pipc, RT_IPC_CMD_RESET, RT_NULL );
|
|
|
++ }
|
|
|
++
|
|
|
++ return pdPASS;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ QueueHandle_t xQueueGenericCreateStatic( const UBaseType_t uxQueueLength,
|
|
|
++ const UBaseType_t uxItemSize,
|
|
|
++ uint8_t * pucQueueStorage,
|
|
|
++ StaticQueue_t * pxStaticQueue,
|
|
|
++ const uint8_t ucQueueType )
|
|
|
++ {
|
|
|
++ Queue_t * pxNewQueue = NULL;
|
|
|
++ char name[RT_NAME_MAX] = {0};
|
|
|
++
|
|
|
++ /* The StaticQueue_t structure and the queue storage area must be
|
|
|
++ * supplied. */
|
|
|
++ configASSERT( pxStaticQueue );
|
|
|
++
|
|
|
++ if( ( uxQueueLength > ( UBaseType_t ) 0 ) &&
|
|
|
++ ( pxStaticQueue != NULL ) &&
|
|
|
++
|
|
|
++ /* A queue storage area should be provided if the item size is not 0, and
|
|
|
++ * should not be provided if the item size is 0. */
|
|
|
++ ( !( ( pucQueueStorage != NULL ) && ( uxItemSize == 0 ) ) ) &&
|
|
|
++ ( !( ( pucQueueStorage == NULL ) && ( uxItemSize != 0 ) ) ) )
|
|
|
++ {
|
|
|
++ if ( ucQueueType == queueQUEUE_TYPE_RECURSIVE_MUTEX || ucQueueType == queueQUEUE_TYPE_MUTEX )
|
|
|
++ {
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "mutex%02d", mutex_index++ );
|
|
|
++ rt_mutex_init( ( rt_mutex_t ) &( ( StaticSemaphore_t * ) pxStaticQueue )->ipc_obj.mutex, name, RT_IPC_FLAG_PRIO );
|
|
|
++ }
|
|
|
++ else if ( ucQueueType == queueQUEUE_TYPE_BINARY_SEMAPHORE || ucQueueType == queueQUEUE_TYPE_COUNTING_SEMAPHORE )
|
|
|
++ {
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "sem%02d", sem_index++ );
|
|
|
++ rt_sem_init( ( rt_sem_t ) &( ( StaticSemaphore_t * ) pxStaticQueue )->ipc_obj.semaphore, name, 0, RT_IPC_FLAG_PRIO );
|
|
|
++ ( ( StaticSemaphore_t * ) pxStaticQueue )->ipc_obj.semaphore.max_value = uxQueueLength;
|
|
|
++ }
|
|
|
++ else if ( ucQueueType == queueQUEUE_TYPE_BASE )
|
|
|
++ {
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "queue%02d", queue_index++ );
|
|
|
++ rt_mq_init( &( pxStaticQueue->ipc_obj ), name, pucQueueStorage, uxItemSize, QUEUE_BUFFER_SIZE( uxQueueLength, uxItemSize ), RT_IPC_FLAG_PRIO );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ return pxNewQueue;
|
|
|
++ }
|
|
|
++ pxStaticQueue->rt_ipc = ( struct rt_ipc_object * ) &pxStaticQueue->ipc_obj;
|
|
|
++ pxNewQueue = ( QueueHandle_t ) pxStaticQueue;
|
|
|
++ }
|
|
|
++
|
|
|
++ return pxNewQueue;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ QueueHandle_t xQueueGenericCreate( const UBaseType_t uxQueueLength,
|
|
|
++ const UBaseType_t uxItemSize,
|
|
|
++ const uint8_t ucQueueType )
|
|
|
++ {
|
|
|
++ Queue_t * pxNewQueue = NULL;
|
|
|
++ char name[RT_NAME_MAX] = {0};
|
|
|
++ struct rt_ipc_object * pipc = RT_NULL;
|
|
|
++
|
|
|
++ if( ( uxQueueLength > ( UBaseType_t ) 0 ) &&
|
|
|
++ /* Check for multiplication overflow. */
|
|
|
++ ( ( SIZE_MAX / uxQueueLength ) >= uxItemSize ) &&
|
|
|
++ /* Check for addition overflow. */
|
|
|
++ ( ( SIZE_MAX - sizeof( Queue_t ) ) >= ( uxQueueLength * uxItemSize ) ) )
|
|
|
++ {
|
|
|
++ pxNewQueue = ( Queue_t * ) RT_KERNEL_MALLOC( sizeof( Queue_t ) );
|
|
|
++ if ( pxNewQueue == NULL )
|
|
|
++ {
|
|
|
++ return ( QueueHandle_t ) pxNewQueue;
|
|
|
++ }
|
|
|
++ if ( ucQueueType == queueQUEUE_TYPE_RECURSIVE_MUTEX || ucQueueType == queueQUEUE_TYPE_MUTEX )
|
|
|
++ {
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "mutex%02d", mutex_index++ );
|
|
|
++ pipc = ( struct rt_ipc_object * ) rt_mutex_create( name, RT_IPC_FLAG_PRIO );
|
|
|
++ }
|
|
|
++ else if ( ucQueueType == queueQUEUE_TYPE_BINARY_SEMAPHORE || ucQueueType == queueQUEUE_TYPE_COUNTING_SEMAPHORE )
|
|
|
++ {
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "sem%02d", sem_index++ );
|
|
|
++ pipc = ( struct rt_ipc_object * ) RT_KERNEL_MALLOC( sizeof( struct rt_semaphore_wrapper ) );
|
|
|
++ if ( pipc != RT_NULL )
|
|
|
++ {
|
|
|
++ rt_sem_init( ( rt_sem_t ) pipc, name, 0, RT_IPC_FLAG_PRIO );
|
|
|
++ ( ( struct rt_semaphore_wrapper * ) pipc )->max_value = uxQueueLength;
|
|
|
++ /* Mark as dynamic so we can distinguish in vQueueDelete */
|
|
|
++ pipc->parent.type &= ~RT_Object_Class_Static;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else if ( ucQueueType == queueQUEUE_TYPE_BASE )
|
|
|
++ {
|
|
|
++ rt_snprintf( name, RT_NAME_MAX, "queue%02d", queue_index++ );
|
|
|
++ pipc = ( struct rt_ipc_object * ) rt_mq_create( name, uxItemSize, uxQueueLength, RT_IPC_FLAG_PRIO);
|
|
|
++ }
|
|
|
++
|
|
|
++ if ( pipc == RT_NULL )
|
|
|
++ {
|
|
|
++ RT_KERNEL_FREE( pxNewQueue );
|
|
|
++ return NULL;
|
|
|
++ }
|
|
|
++ pxNewQueue->rt_ipc = pipc;
|
|
|
++ }
|
|
|
++
|
|
|
++ return ( QueueHandle_t ) pxNewQueue;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_MUTEXES == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) )
|
|
|
++
|
|
|
++ QueueHandle_t xQueueCreateMutex( const uint8_t ucQueueType )
|
|
|
++ {
|
|
|
++ QueueHandle_t xNewQueue;
|
|
|
++ const UBaseType_t uxMutexLength = ( UBaseType_t ) 1, uxMutexSize = ( UBaseType_t ) 0;
|
|
|
++
|
|
|
++ xNewQueue = xQueueGenericCreate( uxMutexLength, uxMutexSize, ucQueueType );
|
|
|
++ return xNewQueue;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_MUTEXES */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_MUTEXES == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++
|
|
|
++ QueueHandle_t xQueueCreateMutexStatic( const uint8_t ucQueueType,
|
|
|
++ StaticQueue_t * pxStaticQueue )
|
|
|
++ {
|
|
|
++ QueueHandle_t xNewQueue;
|
|
|
++ const UBaseType_t uxMutexLength = ( UBaseType_t ) 1, uxMutexSize = ( UBaseType_t ) 0;
|
|
|
++
|
|
|
++ xNewQueue = xQueueGenericCreateStatic( uxMutexLength, uxMutexSize, NULL, pxStaticQueue, ucQueueType );
|
|
|
++
|
|
|
++ return xNewQueue;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_MUTEXES */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_MUTEXES == 1 ) && ( INCLUDE_xSemaphoreGetMutexHolder == 1 ) )
|
|
|
++
|
|
|
++ TaskHandle_t xQueueGetMutexHolder( QueueHandle_t xSemaphore )
|
|
|
++ {
|
|
|
++ TaskHandle_t pxReturn;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xSemaphore );
|
|
|
++
|
|
|
++ pipc = xSemaphore->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ pxReturn = ( TaskHandle_t ) ( ( rt_mutex_t ) pipc )->owner;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ pxReturn = NULL;
|
|
|
++ }
|
|
|
++
|
|
|
++ return pxReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* if ( ( configUSE_MUTEXES == 1 ) && ( INCLUDE_xSemaphoreGetMutexHolder == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_MUTEXES == 1 ) && ( INCLUDE_xSemaphoreGetMutexHolder == 1 ) )
|
|
|
++
|
|
|
++ TaskHandle_t xQueueGetMutexHolderFromISR( QueueHandle_t xSemaphore )
|
|
|
++ {
|
|
|
++ return xQueueGetMutexHolder( xSemaphore );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* if ( ( configUSE_MUTEXES == 1 ) && ( INCLUDE_xSemaphoreGetMutexHolder == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_RECURSIVE_MUTEXES == 1 )
|
|
|
++
|
|
|
++ BaseType_t xQueueGiveMutexRecursive( QueueHandle_t xMutex )
|
|
|
++ {
|
|
|
++ Queue_t * const pxMutex = ( Queue_t * ) xMutex;
|
|
|
++ configASSERT( pxMutex );
|
|
|
++ return xQueueGenericSend( pxMutex, NULL, queueMUTEX_GIVE_BLOCK_TIME, queueSEND_TO_BACK );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_RECURSIVE_MUTEXES */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_RECURSIVE_MUTEXES == 1 )
|
|
|
++
|
|
|
++ BaseType_t xQueueTakeMutexRecursive( QueueHandle_t xMutex,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++ {
|
|
|
++ Queue_t * const pxMutex = ( Queue_t * ) xMutex;
|
|
|
++ configASSERT( pxMutex );
|
|
|
++ return xQueueSemaphoreTake( pxMutex, xTicksToWait );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_RECURSIVE_MUTEXES */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_COUNTING_SEMAPHORES == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++
|
|
|
++ QueueHandle_t xQueueCreateCountingSemaphoreStatic( const UBaseType_t uxMaxCount,
|
|
|
++ const UBaseType_t uxInitialCount,
|
|
|
++ StaticQueue_t * pxStaticQueue )
|
|
|
++ {
|
|
|
++ QueueHandle_t xHandle = NULL;
|
|
|
++
|
|
|
++ if( ( uxMaxCount != 0 ) &&
|
|
|
++ ( uxInitialCount <= uxMaxCount ) )
|
|
|
++ {
|
|
|
++ xHandle = xQueueGenericCreateStatic( uxMaxCount, queueSEMAPHORE_QUEUE_ITEM_LENGTH, NULL, pxStaticQueue, queueQUEUE_TYPE_COUNTING_SEMAPHORE );
|
|
|
++
|
|
|
++ if( xHandle != NULL )
|
|
|
++ {
|
|
|
++ ( ( rt_sem_t ) ( ( Queue_t * ) xHandle )->rt_ipc )->value = uxInitialCount;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ configASSERT( xHandle );
|
|
|
++ }
|
|
|
++
|
|
|
++ return xHandle;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* ( ( configUSE_COUNTING_SEMAPHORES == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( configUSE_COUNTING_SEMAPHORES == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) )
|
|
|
++
|
|
|
++ QueueHandle_t xQueueCreateCountingSemaphore( const UBaseType_t uxMaxCount,
|
|
|
++ const UBaseType_t uxInitialCount )
|
|
|
++ {
|
|
|
++ QueueHandle_t xHandle = NULL;
|
|
|
++
|
|
|
++ if( ( uxMaxCount != 0 ) &&
|
|
|
++ ( uxInitialCount <= uxMaxCount ) )
|
|
|
++ {
|
|
|
++ xHandle = xQueueGenericCreate( uxMaxCount, queueSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_COUNTING_SEMAPHORE );
|
|
|
++
|
|
|
++ if( xHandle != NULL )
|
|
|
++ {
|
|
|
++ ( ( rt_sem_t ) ( ( Queue_t * ) xHandle )->rt_ipc )->value = uxInitialCount;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ configASSERT( xHandle );
|
|
|
++ }
|
|
|
++
|
|
|
++ return xHandle;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* ( ( configUSE_COUNTING_SEMAPHORES == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueGenericSend( QueueHandle_t xQueue,
|
|
|
++ const void * const pvItemToQueue,
|
|
|
++ TickType_t xTicksToWait,
|
|
|
++ const BaseType_t xCopyPosition )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_base_t level;
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ configASSERT( pxQueue );
|
|
|
++ #if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
|
|
|
++ {
|
|
|
++ configASSERT( !( ( xTaskGetSchedulerState() == taskSCHEDULER_SUSPENDED ) && ( xTicksToWait != 0 ) ) );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ err = rt_mutex_release( ( rt_mutex_t ) pipc );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ if ( ( ( rt_sem_t ) pipc )->value < ( ( struct rt_semaphore_wrapper * ) pipc )->max_value )
|
|
|
++ {
|
|
|
++ err = rt_sem_release( ( rt_sem_t ) pipc );
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ if ( xCopyPosition == queueSEND_TO_BACK )
|
|
|
++ {
|
|
|
++ err = rt_mq_send_wait( ( rt_mq_t ) pipc, pvItemToQueue, ( ( rt_mq_t ) pipc )->msg_size, ( rt_int32_t ) xTicksToWait );
|
|
|
++ }
|
|
|
++ else if ( xCopyPosition == queueSEND_TO_FRONT )
|
|
|
++ {
|
|
|
++ // TODO: need to implement the timeout for LIFO
|
|
|
++ err = rt_mq_urgent( ( rt_mq_t ) pipc, pvItemToQueue, ( ( rt_mq_t ) pipc )->msg_size );
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueGenericSendFromISR( QueueHandle_t xQueue,
|
|
|
++ const void * const pvItemToQueue,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken,
|
|
|
++ const BaseType_t xCopyPosition )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ configASSERT( pxQueue );
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++ if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ if ( xCopyPosition == queueSEND_TO_BACK )
|
|
|
++ {
|
|
|
++ err = rt_mq_send( ( rt_mq_t ) pipc, pvItemToQueue, ( ( rt_mq_t ) pipc )->msg_size);
|
|
|
++ }
|
|
|
++ else if ( xCopyPosition == queueSEND_TO_FRONT )
|
|
|
++ {
|
|
|
++ err = rt_mq_urgent( ( rt_mq_t ) pipc, pvItemToQueue, ( ( rt_mq_t ) pipc )->msg_size );
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueGiveFromISR( QueueHandle_t xQueue,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_base_t level;
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ configASSERT( pxQueue );
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++ RT_ASSERT( type != RT_Object_Class_Mutex );
|
|
|
++ if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ if ( ( ( rt_sem_t ) pipc )->value < ( ( struct rt_semaphore_wrapper * ) pipc )->max_value )
|
|
|
++ {
|
|
|
++ err = rt_sem_release( ( rt_sem_t ) pipc );
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++ if ( pxHigherPriorityTaskWoken != NULL )
|
|
|
++ {
|
|
|
++ *pxHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueReceive( QueueHandle_t xQueue,
|
|
|
++ void * const pvBuffer,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ /* Check the queue pointer is not NULL. */
|
|
|
++ configASSERT( ( pxQueue ) );
|
|
|
++
|
|
|
++ /* Cannot block if the scheduler is suspended. */
|
|
|
++ #if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
|
|
|
++ {
|
|
|
++ configASSERT( !( ( xTaskGetSchedulerState() == taskSCHEDULER_SUSPENDED ) && ( xTicksToWait != 0 ) ) );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++ if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ err = rt_mq_recv( ( rt_mq_t ) pipc, pvBuffer, ( ( rt_mq_t ) pipc )->msg_size, ( rt_int32_t ) xTicksToWait );
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueSemaphoreTake( QueueHandle_t xQueue,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ /* Check the queue pointer is not NULL. */
|
|
|
++ configASSERT( ( pxQueue ) );
|
|
|
++
|
|
|
++ /* Cannot block if the scheduler is suspended. */
|
|
|
++ #if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
|
|
|
++ {
|
|
|
++ configASSERT( !( ( xTaskGetSchedulerState() == taskSCHEDULER_SUSPENDED ) && ( xTicksToWait != 0 ) ) );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ err = rt_mutex_take( ( rt_mutex_t ) pipc, ( rt_int32_t ) xTicksToWait );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ err = rt_sem_take( ( rt_sem_t ) pipc, ( rt_int32_t ) xTicksToWait );
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueReceiveFromISR( QueueHandle_t xQueue,
|
|
|
++ void * const pvBuffer,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ configASSERT( pxQueue );
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++ RT_ASSERT( type != RT_Object_Class_Mutex );
|
|
|
++ if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ err = rt_sem_take( ( rt_sem_t ) pipc, RT_WAITING_NO );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ err = rt_mq_recv( ( rt_mq_t ) pipc, pvBuffer, ( ( rt_mq_t ) pipc )->msg_size, RT_WAITING_NO );
|
|
|
++ }
|
|
|
++ if ( pxHigherPriorityTaskWoken != NULL )
|
|
|
++ {
|
|
|
++ *pxHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++UBaseType_t uxQueueMessagesWaiting( const QueueHandle_t xQueue )
|
|
|
++{
|
|
|
++ UBaseType_t uxReturn = 0;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xQueue );
|
|
|
++
|
|
|
++ pipc = xQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ uxReturn = ( ( rt_mutex_t ) pipc )->value;
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ uxReturn = ( ( rt_sem_t ) pipc )->value;
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ uxReturn = ( ( rt_mq_t ) pipc )->entry;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++UBaseType_t uxQueueSpacesAvailable( const QueueHandle_t xQueue )
|
|
|
++{
|
|
|
++ UBaseType_t uxReturn = 0;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xQueue );
|
|
|
++
|
|
|
++ pipc = xQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ uxReturn = 1 - ( ( rt_mutex_t ) pipc )->value;
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ uxReturn = ( ( struct rt_semaphore_wrapper * ) pipc )->max_value - ( ( rt_sem_t ) pipc )->value;
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ uxReturn = ( ( rt_mq_t ) pipc )->max_msgs - ( ( rt_mq_t ) pipc )->entry;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++UBaseType_t uxQueueMessagesWaitingFromISR( const QueueHandle_t xQueue )
|
|
|
++{
|
|
|
++ return uxQueueMessagesWaiting( xQueue );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vQueueDelete( QueueHandle_t xQueue )
|
|
|
++{
|
|
|
++ Queue_t * const pxQueue = xQueue;
|
|
|
++ struct rt_ipc_object *pipc;
|
|
|
++ rt_uint8_t type;
|
|
|
++
|
|
|
++ configASSERT( pxQueue );
|
|
|
++
|
|
|
++ pipc = pxQueue->rt_ipc;
|
|
|
++ RT_ASSERT( pipc != RT_NULL );
|
|
|
++ type = rt_object_get_type( &pipc->parent );
|
|
|
++#if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ if ( rt_object_is_systemobject( ( rt_object_t ) pipc ) )
|
|
|
++#endif
|
|
|
++ {
|
|
|
++ #if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ rt_mutex_detach( ( rt_mutex_t ) pipc );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ rt_sem_detach( ( rt_sem_t ) pipc );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ rt_mq_detach( ( rt_mq_t ) pipc );
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++#if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++#endif
|
|
|
++ #if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ if ( type == RT_Object_Class_Mutex )
|
|
|
++ {
|
|
|
++ rt_mutex_delete( ( rt_mutex_t ) pipc );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_Semaphore )
|
|
|
++ {
|
|
|
++ /* Allocated with rt_sem_init in xQueueGenericCreate */
|
|
|
++ pipc->parent.type |= RT_Object_Class_Static;
|
|
|
++ rt_sem_detach( ( rt_sem_t ) pipc );
|
|
|
++ RT_KERNEL_FREE( pipc );
|
|
|
++ }
|
|
|
++ else if ( type == RT_Object_Class_MessageQueue )
|
|
|
++ {
|
|
|
++ rt_mq_delete( ( rt_mq_t ) pipc );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ return;
|
|
|
++ }
|
|
|
++ RT_KERNEL_FREE( pxQueue );
|
|
|
++ #endif
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueIsQueueEmptyFromISR( const QueueHandle_t xQueue )
|
|
|
++{
|
|
|
++ BaseType_t xReturn;
|
|
|
++
|
|
|
++ configASSERT( xQueue );
|
|
|
++
|
|
|
++ if( uxQueueMessagesWaiting( xQueue ) == ( UBaseType_t ) 0 )
|
|
|
++ {
|
|
|
++ xReturn = pdTRUE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xQueueIsQueueFullFromISR( const QueueHandle_t xQueue )
|
|
|
++{
|
|
|
++ BaseType_t xReturn;
|
|
|
++
|
|
|
++ configASSERT( xQueue );
|
|
|
++
|
|
|
++ if ( uxQueueSpacesAvailable( xQueue ) == ( UBaseType_t ) 0 )
|
|
|
++ {
|
|
|
++ xReturn = pdTRUE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* Unimplemented */
|
|
|
++#include "esp_log.h"
|
|
|
++QueueSetHandle_t xQueueCreateSet( const UBaseType_t uxEventQueueLength )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueCreateSet unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return NULL;
|
|
|
++}
|
|
|
++BaseType_t xQueueAddToSet( QueueSetMemberHandle_t xQueueOrSemaphore,
|
|
|
++ QueueSetHandle_t xQueueSet )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueAddToSet unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return pdFAIL;
|
|
|
++}
|
|
|
++
|
|
|
++BaseType_t xQueueRemoveFromSet( QueueSetMemberHandle_t xQueueOrSemaphore,
|
|
|
++ QueueSetHandle_t xQueueSet )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueRemoveFromSet unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return pdFAIL;
|
|
|
++}
|
|
|
++
|
|
|
++QueueSetMemberHandle_t xQueueSelectFromSet( QueueSetHandle_t xQueueSet,
|
|
|
++ const TickType_t xTicksToWait )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueSelectFromSet unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return NULL;
|
|
|
++}
|
|
|
++
|
|
|
++QueueSetMemberHandle_t xQueueSelectFromSetFromISR( QueueSetHandle_t xQueueSet )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueSelectFromSetFromISR unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return NULL;
|
|
|
++}
|
|
|
++
|
|
|
++BaseType_t xQueuePeek( QueueHandle_t xQueue,
|
|
|
++ void * const pvBuffer,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueuePeek unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return pdFAIL;
|
|
|
++}
|
|
|
++
|
|
|
++BaseType_t xQueueOverwrite(QueueHandle_t xQueue, const void * pvItemToQueue)
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueOverwrite unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return pdFAIL;
|
|
|
++}
|
|
|
++
|
|
|
++BaseType_t xQueueOverwriteFromISR(QueueHandle_t xQueue, const void * pvItemToQueue, BaseType_t *pxHigherPriorityTaskWoken)
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "xQueueOverwriteFromISR unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return pdFAIL;
|
|
|
++}
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/tasks.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/tasks.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..d3e8c27a09
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/tasks.c
|
|
|
+@@ -0,0 +1,1254 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/* Standard includes. */
|
|
|
++#include <stdlib.h>
|
|
|
++#include <string.h>
|
|
|
++
|
|
|
++/* FreeRTOS includes. */
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++
|
|
|
++//TODO: check configMAX_PRIORITIES == RT_THREAD_PRIORITY_MAX
|
|
|
++#define FREERTOS_PRIORITY_TO_RTTHREAD(priority) ( configMAX_PRIORITIES - 1 - ( priority ) )
|
|
|
++#define RTTHREAD_PRIORITY_TO_FREERTOS(priority) ( RT_THREAD_PRIORITY_MAX - 1 - ( priority ) )
|
|
|
++
|
|
|
++/* Values that can be assigned to the ucNotifyState member of the TCB. */
|
|
|
++#define taskNOT_WAITING_NOTIFICATION ( ( uint8_t ) 0 ) /* Must be zero as it is the initialised value. */
|
|
|
++#define taskWAITING_NOTIFICATION ( ( uint8_t ) 1 )
|
|
|
++#define taskNOTIFICATION_RECEIVED ( ( uint8_t ) 2 )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Several functions take a TaskHandle_t parameter that can optionally be NULL,
|
|
|
++ * where NULL is used to indicate that the handle of the currently executing
|
|
|
++ * task should be used in place of the parameter. This macro simply checks to
|
|
|
++ * see if the parameter is NULL and returns a pointer to the appropriate TCB.
|
|
|
++ */
|
|
|
++#define prvGetTCBFromHandle( pxHandle ) ( ( ( pxHandle ) == NULL ) ? ( xTaskGetCurrentTaskHandle() ) : ( pxHandle ) )
|
|
|
++
|
|
|
++/*
|
|
|
++ * Task control block. A task control block (TCB) is allocated for each task,
|
|
|
++ * and stores task state information, including a pointer to the task's context
|
|
|
++ * (the task's run time environment, including register values)
|
|
|
++ */
|
|
|
++typedef struct tskTaskControlBlock
|
|
|
++{
|
|
|
++ struct rt_thread thread;
|
|
|
++ #if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++ TaskHookFunction_t pxTaskTag;
|
|
|
++ #endif
|
|
|
++ #if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++ volatile uint32_t ulNotifiedValue[ configTASK_NOTIFICATION_ARRAY_ENTRIES ];
|
|
|
++ volatile uint8_t ucNotifyState[ configTASK_NOTIFICATION_ARRAY_ENTRIES ];
|
|
|
++ #endif
|
|
|
++ #if ( INCLUDE_xTaskAbortDelay == 1 )
|
|
|
++ uint8_t ucDelayAborted;
|
|
|
++ #endif
|
|
|
++} tskTCB;
|
|
|
++typedef tskTCB TCB_t;
|
|
|
++
|
|
|
++/* Other file private variables. --------------------------------*/
|
|
|
++static volatile BaseType_t xSchedulerRunning = pdFALSE;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/*
|
|
|
++ * Called after a Task_t structure has been allocated either statically or
|
|
|
++ * dynamically to fill in the structure's members.
|
|
|
++ */
|
|
|
++static void prvInitialiseNewTask( TaskFunction_t pxTaskCode,
|
|
|
++ const char * const pcName,
|
|
|
++ const uint32_t ulStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ TaskHandle_t * const pxCreatedTask,
|
|
|
++ TCB_t * pxNewTCB,
|
|
|
++ StackType_t * const puxStackBuffer );
|
|
|
++
|
|
|
++#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode,
|
|
|
++ const char * const pcName,
|
|
|
++ const uint32_t ulStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ StackType_t * const puxStackBuffer,
|
|
|
++ StaticTask_t * const pxTaskBuffer )
|
|
|
++ {
|
|
|
++ TCB_t * pxNewTCB;
|
|
|
++ TaskHandle_t xReturn = NULL;
|
|
|
++
|
|
|
++ configASSERT( puxStackBuffer != NULL );
|
|
|
++ configASSERT( pxTaskBuffer != NULL );
|
|
|
++
|
|
|
++ #if ( configASSERT_DEFINED == 1 )
|
|
|
++ {
|
|
|
++ /* Sanity check that the size of the structure used to declare a
|
|
|
++ * variable of type StaticTask_t equals the size of the real task
|
|
|
++ * structure. */
|
|
|
++ volatile size_t xSize = sizeof( StaticTask_t );
|
|
|
++ configASSERT( xSize == sizeof( TCB_t ) );
|
|
|
++ ( void ) xSize; /* Prevent lint warning when configASSERT() is not used. */
|
|
|
++ }
|
|
|
++ #endif /* configASSERT_DEFINED */
|
|
|
++
|
|
|
++ if( ( pxTaskBuffer != NULL ) && ( puxStackBuffer != NULL ) )
|
|
|
++ {
|
|
|
++ pxNewTCB = ( TCB_t * ) pxTaskBuffer;
|
|
|
++ prvInitialiseNewTask( pxTaskCode, pcName, ulStackDepth, pvParameters, uxPriority, &xReturn, pxNewTCB, puxStackBuffer );
|
|
|
++ rt_thread_startup( ( rt_thread_t ) pxNewTCB );
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* SUPPORT_STATIC_ALLOCATION */
|
|
|
++
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,
|
|
|
++ const char * const pcName,
|
|
|
++ const configSTACK_DEPTH_TYPE usStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ TaskHandle_t * const pxCreatedTask )
|
|
|
++ {
|
|
|
++ TCB_t * pxNewTCB;
|
|
|
++ BaseType_t xReturn = errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;
|
|
|
++ void * stack_start = RT_NULL;
|
|
|
++
|
|
|
++ pxNewTCB = ( TCB_t * ) RT_KERNEL_MALLOC( sizeof( TCB_t ) );
|
|
|
++ if ( pxNewTCB != NULL )
|
|
|
++ {
|
|
|
++ stack_start = RT_KERNEL_MALLOC( usStackDepth * sizeof( StackType_t ) );
|
|
|
++ if ( stack_start != RT_NULL )
|
|
|
++ {
|
|
|
++ prvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, ( StackType_t * ) stack_start );
|
|
|
++ xReturn = pdPASS;
|
|
|
++ /* Mark as dynamic */
|
|
|
++ ( ( struct rt_thread * ) pxNewTCB )->type &= ~RT_Object_Class_Static;
|
|
|
++ rt_thread_startup( ( rt_thread_t ) pxNewTCB );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ RT_KERNEL_FREE( pxNewTCB );
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configSUPPORT_DYNAMIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++/* ESP32 */
|
|
|
++#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskCreatePinnedToCore( TaskFunction_t pvTaskCode,
|
|
|
++ const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
|
|
|
++ const uint32_t usStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ TaskHandle_t * const pvCreatedTask,
|
|
|
++ const BaseType_t xCoreID)
|
|
|
++ {
|
|
|
++ ( void ) xCoreID;
|
|
|
++ return xTaskCreate( pvTaskCode, pcName, usStackDepth, pvParameters, uxPriority, pvCreatedTask );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configSUPPORT_DYNAMIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++static void prvInitialiseNewTask( TaskFunction_t pxTaskCode,
|
|
|
++ const char * const pcName,
|
|
|
++ const uint32_t ulStackDepth,
|
|
|
++ void * const pvParameters,
|
|
|
++ UBaseType_t uxPriority,
|
|
|
++ TaskHandle_t * const pxCreatedTask,
|
|
|
++ TCB_t * pxNewTCB,
|
|
|
++ StackType_t * const puxStackBuffer )
|
|
|
++{
|
|
|
++ /* This is used as an array index so must ensure it's not too large. */
|
|
|
++ configASSERT( uxPriority < configMAX_PRIORITIES );
|
|
|
++
|
|
|
++ if( uxPriority >= ( UBaseType_t ) configMAX_PRIORITIES )
|
|
|
++ {
|
|
|
++ uxPriority = ( UBaseType_t ) configMAX_PRIORITIES - ( UBaseType_t ) 1U;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_thread_init( ( struct rt_thread * ) pxNewTCB, pcName, pxTaskCode, pvParameters,
|
|
|
++ puxStackBuffer, ulStackDepth * sizeof( StackType_t ), FREERTOS_PRIORITY_TO_RTTHREAD( uxPriority ), 1 );
|
|
|
++
|
|
|
++#if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++ pxNewTCB->pxTaskTag = NULL;
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++ rt_memset( ( void * ) &( pxNewTCB->ulNotifiedValue[ 0 ] ), 0x00, sizeof( pxNewTCB->ulNotifiedValue ) );
|
|
|
++ rt_memset( ( void * ) &( pxNewTCB->ucNotifyState[ 0 ] ), 0x00, sizeof( pxNewTCB->ucNotifyState ) );
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( INCLUDE_xTaskAbortDelay == 1 )
|
|
|
++ pxNewTCB->ucDelayAborted = pdFALSE;
|
|
|
++#endif
|
|
|
++
|
|
|
++ if ( pxCreatedTask != NULL )
|
|
|
++ {
|
|
|
++ *pxCreatedTask = ( TaskHandle_t ) pxNewTCB;
|
|
|
++ }
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_vTaskDelete == 1 )
|
|
|
++
|
|
|
++ void vTaskDelete( TaskHandle_t xTaskToDelete )
|
|
|
++ {
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) prvGetTCBFromHandle( xTaskToDelete );
|
|
|
++ if ( thread == RT_NULL )
|
|
|
++ {
|
|
|
++ thread = rt_thread_self();
|
|
|
++ }
|
|
|
++ #if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ if ( rt_object_is_systemobject( ( rt_object_t ) thread ) )
|
|
|
++ #endif
|
|
|
++ {
|
|
|
++ #if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ rt_thread_detach( thread );
|
|
|
++ #endif
|
|
|
++ #if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ #endif
|
|
|
++ #if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ rt_thread_delete( thread );
|
|
|
++ #endif
|
|
|
++ }
|
|
|
++
|
|
|
++ if ( thread == rt_thread_self() )
|
|
|
++ {
|
|
|
++ rt_schedule();
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_vTaskDelete */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_xTaskDelayUntil == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskDelayUntil( TickType_t * const pxPreviousWakeTime,
|
|
|
++ const TickType_t xTimeIncrement )
|
|
|
++ {
|
|
|
++ BaseType_t xShouldDelay = pdFALSE;
|
|
|
++ rt_base_t level;
|
|
|
++ rt_tick_t cur_tick;
|
|
|
++
|
|
|
++ RT_ASSERT( pxPreviousWakeTime != RT_NULL );
|
|
|
++ RT_ASSERT( xTimeIncrement > 0U );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ cur_tick = rt_tick_get();
|
|
|
++ if (cur_tick - *pxPreviousWakeTime < xTimeIncrement)
|
|
|
++ {
|
|
|
++ rt_thread_delay_until( pxPreviousWakeTime, xTimeIncrement );
|
|
|
++ xShouldDelay = pdTRUE;
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return xShouldDelay;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_xTaskDelayUntil */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_vTaskDelay == 1 )
|
|
|
++
|
|
|
++ void vTaskDelay( const TickType_t xTicksToDelay )
|
|
|
++ {
|
|
|
++ rt_thread_delay( xTicksToDelay );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_vTaskDelay */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( INCLUDE_eTaskGetState == 1 ) || ( configUSE_TRACE_FACILITY == 1 ) || ( INCLUDE_xTaskAbortDelay == 1 ) )
|
|
|
++
|
|
|
++ eTaskState eTaskGetState( TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ eTaskState eReturn;
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) xTask;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xTask );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ switch ( thread->stat & RT_THREAD_STAT_MASK )
|
|
|
++ {
|
|
|
++ case RT_THREAD_READY:
|
|
|
++ {
|
|
|
++ eReturn = eReady;
|
|
|
++ break;
|
|
|
++ }
|
|
|
++ case RT_THREAD_SUSPEND:
|
|
|
++ {
|
|
|
++ /* If thread timer is activated it is blocked with a timeout */
|
|
|
++ if ( thread->thread_timer.parent.flag & RT_TIMER_FLAG_ACTIVATED )
|
|
|
++ {
|
|
|
++ eReturn = eBlocked;
|
|
|
++ }
|
|
|
++ /* Otherwise it is suspended or blocked with an infinite timeout */
|
|
|
++ else
|
|
|
++ {
|
|
|
++ eReturn = eSuspended;
|
|
|
++ }
|
|
|
++ break;
|
|
|
++ }
|
|
|
++ case RT_THREAD_RUNNING:
|
|
|
++ {
|
|
|
++ eReturn = eRunning;
|
|
|
++ break;
|
|
|
++ }
|
|
|
++ case RT_THREAD_CLOSE:
|
|
|
++ {
|
|
|
++ eReturn = eDeleted;
|
|
|
++ break;
|
|
|
++ }
|
|
|
++ default:
|
|
|
++ eReturn = eInvalid;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return eReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_eTaskGetState */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_uxTaskPriorityGet == 1 )
|
|
|
++
|
|
|
++ UBaseType_t uxTaskPriorityGet( const TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ UBaseType_t uxReturn;
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) prvGetTCBFromHandle( xTask );
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ uxReturn = thread->current_priority;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return RTTHREAD_PRIORITY_TO_FREERTOS( uxReturn );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_uxTaskPriorityGet */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_uxTaskPriorityGet == 1 )
|
|
|
++
|
|
|
++ UBaseType_t uxTaskPriorityGetFromISR( const TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ return uxTaskPriorityGet( xTask );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_uxTaskPriorityGet */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_vTaskPrioritySet == 1 )
|
|
|
++
|
|
|
++ void vTaskPrioritySet( TaskHandle_t xTask,
|
|
|
++ UBaseType_t uxNewPriority )
|
|
|
++ {
|
|
|
++ extern rt_thread_t rt_current_thread;
|
|
|
++ rt_thread_t thread;
|
|
|
++ rt_uint8_t current_priority;
|
|
|
++ rt_bool_t need_schedule = RT_FALSE;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( uxNewPriority < configMAX_PRIORITIES );
|
|
|
++
|
|
|
++ /* Ensure the new priority is valid. */
|
|
|
++ if( uxNewPriority >= ( UBaseType_t ) configMAX_PRIORITIES )
|
|
|
++ {
|
|
|
++ uxNewPriority = ( UBaseType_t ) configMAX_PRIORITIES - ( UBaseType_t ) 1U;
|
|
|
++ }
|
|
|
++ uxNewPriority = FREERTOS_PRIORITY_TO_RTTHREAD( uxNewPriority );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ thread = ( rt_thread_t ) prvGetTCBFromHandle( xTask );
|
|
|
++ current_priority = thread->current_priority;
|
|
|
++ if ( current_priority != uxNewPriority )
|
|
|
++ {
|
|
|
++ rt_thread_control( thread, RT_THREAD_CTRL_CHANGE_PRIORITY, &uxNewPriority);
|
|
|
++ if ( uxNewPriority < current_priority )
|
|
|
++ {
|
|
|
++ /* The priority of a task other than the currently running task is being raised.
|
|
|
++ * Need to schedule if the priority is raised above that of the running task */
|
|
|
++ if ( thread != rt_current_thread && uxNewPriority <= rt_current_thread->current_priority )
|
|
|
++ {
|
|
|
++ need_schedule = RT_TRUE;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ /* Setting the priority of the running task down means
|
|
|
++ * there may now be another task of higher priority that
|
|
|
++ * is ready to execute. */
|
|
|
++ else if ( thread == rt_current_thread )
|
|
|
++ {
|
|
|
++ need_schedule = RT_TRUE;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ if ( need_schedule == RT_TRUE )
|
|
|
++ {
|
|
|
++ rt_schedule();
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_vTaskPrioritySet */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_vTaskSuspend == 1 )
|
|
|
++
|
|
|
++ void vTaskSuspend( TaskHandle_t xTaskToSuspend )
|
|
|
++ {
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) prvGetTCBFromHandle( xTaskToSuspend );
|
|
|
++ if ( rt_thread_suspend( thread ) == RT_EOK )
|
|
|
++ {
|
|
|
++ rt_schedule();
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_vTaskSuspend */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_vTaskSuspend == 1 )
|
|
|
++
|
|
|
++ void vTaskResume( TaskHandle_t xTaskToResume )
|
|
|
++ {
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) xTaskToResume;
|
|
|
++ rt_bool_t need_schedule = RT_FALSE;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ /* It does not make sense to resume the calling task. */
|
|
|
++ configASSERT( xTaskToResume );
|
|
|
++
|
|
|
++ if ( thread != NULL && thread != rt_thread_self() )
|
|
|
++ {
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ /* A task with higher priority than the current running task is ready */
|
|
|
++ if ( rt_thread_resume( thread ) == RT_EOK && thread->current_priority <= rt_thread_self()->current_priority )
|
|
|
++ {
|
|
|
++ need_schedule = RT_TRUE;
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++ if (need_schedule == RT_TRUE)
|
|
|
++ {
|
|
|
++ rt_schedule();
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_vTaskSuspend */
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( INCLUDE_xTaskResumeFromISR == 1 ) && ( INCLUDE_vTaskSuspend == 1 ) )
|
|
|
++
|
|
|
++ BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume )
|
|
|
++ {
|
|
|
++ vTaskResume( xTaskToResume );
|
|
|
++ return pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* ( ( INCLUDE_xTaskResumeFromISR == 1 ) && ( INCLUDE_vTaskSuspend == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vTaskStartScheduler( void )
|
|
|
++{
|
|
|
++ xSchedulerRunning = pdTRUE;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vTaskEndScheduler( void )
|
|
|
++{
|
|
|
++ xSchedulerRunning = pdFALSE;
|
|
|
++ vPortEndScheduler();
|
|
|
++}
|
|
|
++/*----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_NEWLIB_REENTRANT == 1 )
|
|
|
++struct _reent* __getreent(void) {
|
|
|
++ return _GLOBAL_REENT;
|
|
|
++}
|
|
|
++#endif
|
|
|
++
|
|
|
++void vTaskSuspendAll( void )
|
|
|
++{
|
|
|
++ rt_enter_critical();
|
|
|
++}
|
|
|
++/*----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xTaskResumeAll( void )
|
|
|
++{
|
|
|
++ rt_exit_critical();
|
|
|
++ return pdFALSE;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++TickType_t xTaskGetTickCount( void )
|
|
|
++{
|
|
|
++ return rt_tick_get();
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++TickType_t xTaskGetTickCountFromISR( void )
|
|
|
++{
|
|
|
++ return rt_tick_get();
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++UBaseType_t uxTaskGetNumberOfTasks( void )
|
|
|
++{
|
|
|
++ UBaseType_t uxReturn = 0;
|
|
|
++ rt_base_t level;
|
|
|
++ struct rt_object_information *information;
|
|
|
++ struct rt_list_node *node = RT_NULL;
|
|
|
++
|
|
|
++ information = rt_object_get_information( RT_Object_Class_Thread );
|
|
|
++ RT_ASSERT( information != RT_NULL );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ rt_list_for_each( node, &( information->object_list ) )
|
|
|
++ {
|
|
|
++ uxReturn += 1;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++char * pcTaskGetName( TaskHandle_t xTaskToQuery )
|
|
|
++{
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) prvGetTCBFromHandle( xTaskToQuery );
|
|
|
++ return &( thread->name[ 0 ] );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_xTaskGetHandle == 1 )
|
|
|
++
|
|
|
++ TaskHandle_t xTaskGetHandle( const char * pcNameToQuery )
|
|
|
++ {
|
|
|
++ return ( TaskHandle_t ) rt_thread_find( ( char * ) pcNameToQuery );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_xTaskGetHandle */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_xTaskGetIdleTaskHandle == 1 )
|
|
|
++
|
|
|
++ TaskHandle_t xTaskGetIdleTaskHandle( void )
|
|
|
++ {
|
|
|
++ return ( TaskHandle_t ) rt_thread_find( "tidle0" );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_xTaskGetIdleTaskHandle */
|
|
|
++/*----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_xTaskAbortDelay == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskAbortDelay( TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ TCB_t * pxTCB = xTask;
|
|
|
++ BaseType_t xReturn;
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) xTask;
|
|
|
++ rt_bool_t need_schedule = RT_FALSE;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( pxTCB );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ if ( eTaskGetState( xTask ) == eBlocked )
|
|
|
++ {
|
|
|
++ rt_thread_resume( thread );
|
|
|
++ thread->error = -RT_ETIMEOUT;
|
|
|
++ pxTCB->ucDelayAborted = pdTRUE;
|
|
|
++ if ( thread->current_priority < rt_thread_self()->current_priority ){
|
|
|
++ need_schedule = RT_TRUE;
|
|
|
++ }
|
|
|
++ xReturn = pdPASS;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = pdFAIL;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ if ( need_schedule == RT_TRUE )
|
|
|
++ {
|
|
|
++ rt_schedule();
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_xTaskAbortDelay */
|
|
|
++/*----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++
|
|
|
++ void vTaskSetApplicationTaskTag( TaskHandle_t xTask,
|
|
|
++ TaskHookFunction_t pxHookFunction )
|
|
|
++ {
|
|
|
++ TCB_t * xTCB = prvGetTCBFromHandle( xTask );
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ xTCB->pxTaskTag = pxHookFunction;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_APPLICATION_TASK_TAG */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++
|
|
|
++ TaskHookFunction_t xTaskGetApplicationTaskTag( TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ TaskHookFunction_t xReturn;
|
|
|
++ TCB_t * xTCB = prvGetTCBFromHandle( xTask );
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ xReturn = xTCB->pxTaskTag;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_APPLICATION_TASK_TAG */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++
|
|
|
++ TaskHookFunction_t xTaskGetApplicationTaskTagFromISR( TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ return xTaskGetApplicationTaskTag( xTask );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_APPLICATION_TASK_TAG */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_APPLICATION_TASK_TAG == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskCallApplicationTaskHook( TaskHandle_t xTask,
|
|
|
++ void * pvParameter )
|
|
|
++ {
|
|
|
++ BaseType_t xReturn;
|
|
|
++ TCB_t * xTCB = prvGetTCBFromHandle( xTask );
|
|
|
++
|
|
|
++ if( xTCB->pxTaskTag != NULL )
|
|
|
++ {
|
|
|
++ xReturn = xTCB->pxTaskTag( pvParameter );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = pdFAIL;
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_APPLICATION_TASK_TAG */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vTaskSetTimeOutState( TimeOut_t * const pxTimeOut )
|
|
|
++{
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( pxTimeOut );
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ pxTimeOut->xOverflowCount = 0;
|
|
|
++ pxTimeOut->xTimeOnEntering = ( TickType_t ) rt_tick_get();
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++void vTaskInternalSetTimeOutState( TimeOut_t * const pxTimeOut )
|
|
|
++{
|
|
|
++ /* For internal use only as it does not use a critical section. */
|
|
|
++ pxTimeOut->xOverflowCount = 0;
|
|
|
++ pxTimeOut->xTimeOnEntering = ( TickType_t ) rt_tick_get();;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++BaseType_t xTaskCheckForTimeOut( TimeOut_t * const pxTimeOut,
|
|
|
++ TickType_t * const pxTicksToWait )
|
|
|
++{
|
|
|
++ TCB_t * pxCurrentTCB = ( TCB_t * ) rt_thread_self();
|
|
|
++ BaseType_t xReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( pxTimeOut );
|
|
|
++ configASSERT( pxTicksToWait );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ /* Minor optimisation. The tick count cannot change in this block. */
|
|
|
++ const TickType_t xConstTickCount = ( TickType_t ) rt_tick_get();
|
|
|
++ const TickType_t xElapsedTime = xConstTickCount - pxTimeOut->xTimeOnEntering;
|
|
|
++
|
|
|
++#if ( INCLUDE_xTaskAbortDelay == 1 )
|
|
|
++ if( pxCurrentTCB->ucDelayAborted != ( uint8_t ) pdFALSE )
|
|
|
++ {
|
|
|
++ /* The delay was aborted, which is not the same as a time out,
|
|
|
++ * but has the same result. */
|
|
|
++ pxCurrentTCB->ucDelayAborted = pdFALSE;
|
|
|
++ xReturn = pdTRUE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++#endif
|
|
|
++
|
|
|
++#if ( INCLUDE_vTaskSuspend == 1 )
|
|
|
++ if( *pxTicksToWait == portMAX_DELAY )
|
|
|
++ {
|
|
|
++ /* If INCLUDE_vTaskSuspend is set to 1 and the block time
|
|
|
++ * specified is the maximum block time then the task should block
|
|
|
++ * indefinitely, and therefore never time out. */
|
|
|
++ xReturn = pdFALSE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++#endif
|
|
|
++
|
|
|
++ if( xElapsedTime < *pxTicksToWait )
|
|
|
++ {
|
|
|
++ /* Not a genuine timeout. Adjust parameters for time remaining. */
|
|
|
++ *pxTicksToWait -= xElapsedTime;
|
|
|
++ vTaskInternalSetTimeOutState( pxTimeOut );
|
|
|
++ xReturn = pdFALSE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ *pxTicksToWait = ( TickType_t ) 0;
|
|
|
++ xReturn = pdTRUE;
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++}
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( INCLUDE_xTaskGetCurrentTaskHandle == 1 ) )
|
|
|
++
|
|
|
++ TaskHandle_t xTaskGetCurrentTaskHandle( void )
|
|
|
++ {
|
|
|
++ TaskHandle_t xReturn;
|
|
|
++
|
|
|
++ /* A critical section is not required as this is not called from
|
|
|
++ * an interrupt and the current TCB will always be the same for any
|
|
|
++ * individual execution thread. */
|
|
|
++ xReturn = ( TaskHandle_t ) rt_thread_self();
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* ( ( INCLUDE_xTaskGetCurrentTaskHandle == 1 ) || ( configUSE_MUTEXES == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
|
|
|
++
|
|
|
++ BaseType_t xTaskGetSchedulerState( void )
|
|
|
++ {
|
|
|
++ BaseType_t xReturn;
|
|
|
++
|
|
|
++ if( xSchedulerRunning == pdFALSE )
|
|
|
++ {
|
|
|
++ xReturn = taskSCHEDULER_NOT_STARTED;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ if( rt_critical_level() == 0 )
|
|
|
++ {
|
|
|
++ xReturn = taskSCHEDULER_RUNNING;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = taskSCHEDULER_SUSPENDED;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* ( ( INCLUDE_xTaskGetSchedulerState == 1 ) ) */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ uint32_t ulTaskGenericNotifyTake( UBaseType_t uxIndexToWait,
|
|
|
++ BaseType_t xClearCountOnExit,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++ {
|
|
|
++ uint32_t ulReturn;
|
|
|
++ TCB_t * pxCurrentTCB = ( TCB_t * ) rt_thread_self();
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) pxCurrentTCB;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( uxIndexToWait < configTASK_NOTIFICATION_ARRAY_ENTRIES );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ /* Only block if the notification count is not already non-zero. */
|
|
|
++ if( pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] == 0UL )
|
|
|
++ {
|
|
|
++ /* Mark this task as waiting for a notification. */
|
|
|
++ pxCurrentTCB->ucNotifyState[ uxIndexToWait ] = taskWAITING_NOTIFICATION;
|
|
|
++
|
|
|
++ if( xTicksToWait > ( TickType_t ) 0 )
|
|
|
++ {
|
|
|
++ rt_thread_suspend( thread );
|
|
|
++ if ( ( rt_int32_t ) xTicksToWait > 0 )
|
|
|
++ {
|
|
|
++ rt_timer_control(&(thread->thread_timer),
|
|
|
++ RT_TIMER_CTRL_SET_TIME,
|
|
|
++ &xTicksToWait);
|
|
|
++ rt_timer_start(&(thread->thread_timer));
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable(level);
|
|
|
++ rt_schedule();
|
|
|
++ /* Clear thread error. */
|
|
|
++ thread->error = RT_EOK;
|
|
|
++ }
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ ulReturn = pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ];
|
|
|
++
|
|
|
++ if( ulReturn != 0UL )
|
|
|
++ {
|
|
|
++ if( xClearCountOnExit != pdFALSE )
|
|
|
++ {
|
|
|
++ pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] = 0UL;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] = ulReturn - ( uint32_t ) 1;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ pxCurrentTCB->ucNotifyState[ uxIndexToWait ] = taskNOT_WAITING_NOTIFICATION;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return ulReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskGenericNotifyWait( UBaseType_t uxIndexToWait,
|
|
|
++ uint32_t ulBitsToClearOnEntry,
|
|
|
++ uint32_t ulBitsToClearOnExit,
|
|
|
++ uint32_t * pulNotificationValue,
|
|
|
++ TickType_t xTicksToWait )
|
|
|
++ {
|
|
|
++ BaseType_t xReturn;
|
|
|
++ TCB_t * pxCurrentTCB = ( TCB_t * ) rt_thread_self();
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) pxCurrentTCB;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( uxIndexToWait < configTASK_NOTIFICATION_ARRAY_ENTRIES );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ /* Only block if a notification is not already pending. */
|
|
|
++ if( pxCurrentTCB->ucNotifyState[ uxIndexToWait ] != taskNOTIFICATION_RECEIVED )
|
|
|
++ {
|
|
|
++ /* Clear bits in the task's notification value as bits may get
|
|
|
++ * set by the notifying task or interrupt. This can be used to
|
|
|
++ * clear the value to zero. */
|
|
|
++ pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] &= ~ulBitsToClearOnEntry;
|
|
|
++
|
|
|
++ /* Mark this task as waiting for a notification. */
|
|
|
++ pxCurrentTCB->ucNotifyState[ uxIndexToWait ] = taskWAITING_NOTIFICATION;
|
|
|
++
|
|
|
++ if( xTicksToWait > ( TickType_t ) 0 )
|
|
|
++ {
|
|
|
++ rt_thread_suspend( thread );
|
|
|
++ if ( ( rt_int32_t ) xTicksToWait > 0 )
|
|
|
++ {
|
|
|
++ rt_timer_control(&(thread->thread_timer),
|
|
|
++ RT_TIMER_CTRL_SET_TIME,
|
|
|
++ &xTicksToWait);
|
|
|
++ rt_timer_start(&(thread->thread_timer));
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable(level);
|
|
|
++ rt_schedule();
|
|
|
++ /* Clear thread error. It is not used to determine the function return value. */
|
|
|
++ thread->error = RT_EOK;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ if( pulNotificationValue != NULL )
|
|
|
++ {
|
|
|
++ /* Output the current notification value, which may or may not
|
|
|
++ * have changed. */
|
|
|
++ *pulNotificationValue = pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ];
|
|
|
++ }
|
|
|
++
|
|
|
++ /* If ucNotifyValue is set then either the task never entered the
|
|
|
++ * blocked state (because a notification was already pending) or the
|
|
|
++ * task unblocked because of a notification. Otherwise the task
|
|
|
++ * unblocked because of a timeout. */
|
|
|
++ if( pxCurrentTCB->ucNotifyState[ uxIndexToWait ] != taskNOTIFICATION_RECEIVED )
|
|
|
++ {
|
|
|
++ /* A notification was not received. */
|
|
|
++ xReturn = pdFALSE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ /* A notification was already pending or a notification was
|
|
|
++ * received while the task was waiting. */
|
|
|
++ pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] &= ~ulBitsToClearOnExit;
|
|
|
++ xReturn = pdTRUE;
|
|
|
++ }
|
|
|
++
|
|
|
++ pxCurrentTCB->ucNotifyState[ uxIndexToWait ] = taskNOT_WAITING_NOTIFICATION;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskGenericNotify( TaskHandle_t xTaskToNotify,
|
|
|
++ UBaseType_t uxIndexToNotify,
|
|
|
++ uint32_t ulValue,
|
|
|
++ eNotifyAction eAction,
|
|
|
++ uint32_t * pulPreviousNotificationValue )
|
|
|
++ {
|
|
|
++ TCB_t * pxTCB;
|
|
|
++ BaseType_t xReturn = pdPASS;
|
|
|
++ uint8_t ucOriginalNotifyState;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( uxIndexToNotify < configTASK_NOTIFICATION_ARRAY_ENTRIES );
|
|
|
++ configASSERT( xTaskToNotify );
|
|
|
++ pxTCB = xTaskToNotify;
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ if( pulPreviousNotificationValue != NULL )
|
|
|
++ {
|
|
|
++ *pulPreviousNotificationValue = pxTCB->ulNotifiedValue[ uxIndexToNotify ];
|
|
|
++ }
|
|
|
++
|
|
|
++ ucOriginalNotifyState = pxTCB->ucNotifyState[ uxIndexToNotify ];
|
|
|
++
|
|
|
++ pxTCB->ucNotifyState[ uxIndexToNotify ] = taskNOTIFICATION_RECEIVED;
|
|
|
++
|
|
|
++ switch( eAction )
|
|
|
++ {
|
|
|
++ case eSetBits:
|
|
|
++ pxTCB->ulNotifiedValue[ uxIndexToNotify ] |= ulValue;
|
|
|
++ break;
|
|
|
++
|
|
|
++ case eIncrement:
|
|
|
++ ( pxTCB->ulNotifiedValue[ uxIndexToNotify ] )++;
|
|
|
++ break;
|
|
|
++
|
|
|
++ case eSetValueWithOverwrite:
|
|
|
++ pxTCB->ulNotifiedValue[ uxIndexToNotify ] = ulValue;
|
|
|
++ break;
|
|
|
++
|
|
|
++ case eSetValueWithoutOverwrite:
|
|
|
++
|
|
|
++ if( ucOriginalNotifyState != taskNOTIFICATION_RECEIVED )
|
|
|
++ {
|
|
|
++ pxTCB->ulNotifiedValue[ uxIndexToNotify ] = ulValue;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ /* The value could not be written to the task. */
|
|
|
++ xReturn = pdFAIL;
|
|
|
++ }
|
|
|
++
|
|
|
++ break;
|
|
|
++
|
|
|
++ case eNoAction:
|
|
|
++
|
|
|
++ /* The task is being notified without its notify value being
|
|
|
++ * updated. */
|
|
|
++ break;
|
|
|
++
|
|
|
++ default:
|
|
|
++
|
|
|
++ /* Should not get here if all enums are handled.
|
|
|
++ * Artificially force an assert by testing a value the
|
|
|
++ * compiler can't assume is const. */
|
|
|
++ configASSERT( xTaskToNotify == NULL );
|
|
|
++
|
|
|
++ break;
|
|
|
++ }
|
|
|
++
|
|
|
++
|
|
|
++ /* If the task is in the blocked state specifically to wait for a
|
|
|
++ * notification then unblock it now. */
|
|
|
++ if( ucOriginalNotifyState == taskWAITING_NOTIFICATION )
|
|
|
++ {
|
|
|
++ rt_thread_resume( ( rt_thread_t ) pxTCB );
|
|
|
++
|
|
|
++ if( ( ( rt_thread_t ) pxTCB )->current_priority < rt_thread_self()->current_priority )
|
|
|
++ {
|
|
|
++ /* The notified task has a priority above the currently
|
|
|
++ * executing task so a schedule is required. */
|
|
|
++ rt_schedule();
|
|
|
++ }
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskGenericNotifyFromISR( TaskHandle_t xTaskToNotify,
|
|
|
++ UBaseType_t uxIndexToNotify,
|
|
|
++ uint32_t ulValue,
|
|
|
++ eNotifyAction eAction,
|
|
|
++ uint32_t * pulPreviousNotificationValue,
|
|
|
++ BaseType_t * pxHigherPriorityTaskWoken )
|
|
|
++ {
|
|
|
++ BaseType_t xReturn;
|
|
|
++
|
|
|
++ xReturn = xTaskGenericNotify( xTaskToNotify, uxIndexToNotify, ulValue, eAction, pulPreviousNotificationValue );
|
|
|
++ if ( pxHigherPriorityTaskWoken != NULL )
|
|
|
++ {
|
|
|
++ *pxHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ void vTaskGenericNotifyGiveFromISR( TaskHandle_t xTaskToNotify,
|
|
|
++ UBaseType_t uxIndexToNotify,
|
|
|
++ BaseType_t * pxHigherPriorityTaskWoken )
|
|
|
++ {
|
|
|
++ xTaskNotifyGiveIndexed( xTaskToNotify, uxIndexToNotify );
|
|
|
++ if ( pxHigherPriorityTaskWoken != NULL )
|
|
|
++ {
|
|
|
++ *pxHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ BaseType_t xTaskGenericNotifyStateClear( TaskHandle_t xTask,
|
|
|
++ UBaseType_t uxIndexToClear )
|
|
|
++ {
|
|
|
++ TCB_t * pxTCB;
|
|
|
++ BaseType_t xReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( uxIndexToClear < configTASK_NOTIFICATION_ARRAY_ENTRIES );
|
|
|
++
|
|
|
++ /* If null is passed in here then it is the calling task that is having
|
|
|
++ * its notification state cleared. */
|
|
|
++ pxTCB = prvGetTCBFromHandle( xTask );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ if( pxTCB->ucNotifyState[ uxIndexToClear ] == taskNOTIFICATION_RECEIVED )
|
|
|
++ {
|
|
|
++ pxTCB->ucNotifyState[ uxIndexToClear ] = taskNOT_WAITING_NOTIFICATION;
|
|
|
++ xReturn = pdPASS;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = pdFAIL;
|
|
|
++ }
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( configUSE_TASK_NOTIFICATIONS == 1 )
|
|
|
++
|
|
|
++ uint32_t ulTaskGenericNotifyValueClear( TaskHandle_t xTask,
|
|
|
++ UBaseType_t uxIndexToClear,
|
|
|
++ uint32_t ulBitsToClear )
|
|
|
++ {
|
|
|
++ TCB_t * pxTCB;
|
|
|
++ uint32_t ulReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ /* If null is passed in here then it is the calling task that is having
|
|
|
++ * its notification state cleared. */
|
|
|
++ pxTCB = prvGetTCBFromHandle( xTask );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++
|
|
|
++ /* Return the notification as it was before the bits were cleared,
|
|
|
++ * then clear the bit mask. */
|
|
|
++ ulReturn = pxTCB->ulNotifiedValue[ uxIndexToClear ];
|
|
|
++ pxTCB->ulNotifiedValue[ uxIndexToClear ] &= ~ulBitsToClear;
|
|
|
++
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return ulReturn;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* configUSE_TASK_NOTIFICATIONS */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_uxTaskGetStackHighWaterMark2 == 1 )
|
|
|
++
|
|
|
++/* uxTaskGetStackHighWaterMark() and uxTaskGetStackHighWaterMark2() are the
|
|
|
++ * same except for their return type. Using configSTACK_DEPTH_TYPE allows the
|
|
|
++ * user to determine the return type. It gets around the problem of the value
|
|
|
++ * overflowing on 8-bit types without breaking backward compatibility for
|
|
|
++ * applications that expect an 8-bit return type. */
|
|
|
++ configSTACK_DEPTH_TYPE uxTaskGetStackHighWaterMark2( TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ uint32_t ulCount = 0U;
|
|
|
++ rt_thread_t thread = ( rt_thread_t ) prvGetTCBFromHandle( xTask );
|
|
|
++ rt_uint8_t * stack_addr = thread->stack_addr;
|
|
|
++
|
|
|
++ #ifdef ARCH_CPU_STACK_GROWS_UPWARD
|
|
|
++ stack_addr = stack_addr + thread->stack_size - 1;
|
|
|
++ while ( *stack_addr == '#' )
|
|
|
++ {
|
|
|
++ ulCount += 1;
|
|
|
++ stack_addr -= 1;
|
|
|
++ }
|
|
|
++ #else
|
|
|
++ while ( *stack_addr == '#' )
|
|
|
++ {
|
|
|
++ ulCount += 1;
|
|
|
++ stack_addr += 1;
|
|
|
++ }
|
|
|
++ #endif
|
|
|
++
|
|
|
++ ulCount /= ( uint32_t ) sizeof( StackType_t );
|
|
|
++
|
|
|
++ return ( configSTACK_DEPTH_TYPE ) ulCount;
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_uxTaskGetStackHighWaterMark2 */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#if ( INCLUDE_uxTaskGetStackHighWaterMark == 1 )
|
|
|
++
|
|
|
++ UBaseType_t uxTaskGetStackHighWaterMark( TaskHandle_t xTask )
|
|
|
++ {
|
|
|
++ return ( UBaseType_t ) uxTaskGetStackHighWaterMark2( xTask );
|
|
|
++ }
|
|
|
++
|
|
|
++#endif /* INCLUDE_uxTaskGetStackHighWaterMark */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++
|
|
|
++/* ESP32 */
|
|
|
++BaseType_t xTaskGetAffinity( TaskHandle_t xTask )
|
|
|
++{
|
|
|
++ ( void ) xTask;
|
|
|
++ return 0;
|
|
|
++}
|
|
|
++
|
|
|
++TaskHandle_t xTaskGetCurrentTaskHandleForCPU( BaseType_t cpuid )
|
|
|
++{
|
|
|
++ ( void ) cpuid;
|
|
|
++ return xTaskGetCurrentTaskHandle();
|
|
|
++}
|
|
|
++
|
|
|
++TaskHandle_t xTaskGetIdleTaskHandleForCPU( UBaseType_t cpuid )
|
|
|
++{
|
|
|
++ ( void ) cpuid;
|
|
|
++ return xTaskGetIdleTaskHandle();
|
|
|
++}
|
|
|
++
|
|
|
++/* Unimplemented */
|
|
|
++#include "esp_log.h"
|
|
|
++#if ( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 )
|
|
|
++void vTaskSetThreadLocalStoragePointer( TaskHandle_t xTaskToSet,
|
|
|
++ BaseType_t xIndex,
|
|
|
++ void * pvValue )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "vTaskSetThreadLocalStoragePointer unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++}
|
|
|
++void * pvTaskGetThreadLocalStoragePointer( TaskHandle_t xTaskToQuery,
|
|
|
++ BaseType_t xIndex )
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "pvTaskGetThreadLocalStoragePointer unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++ return NULL;
|
|
|
++}
|
|
|
++#if ( configTHREAD_LOCAL_STORAGE_DELETE_CALLBACKS )
|
|
|
++typedef void (*TlsDeleteCallbackFunction_t)( int, void * );
|
|
|
++void vTaskSetThreadLocalStoragePointerAndDelCallback( TaskHandle_t xTaskToSet, BaseType_t xIndex, void *pvValue, TlsDeleteCallbackFunction_t pvDelCallback)
|
|
|
++{
|
|
|
++ ESP_LOGE("freertos", "vTaskSetThreadLocalStoragePointerAndDelCallback unimplemented");
|
|
|
++ RT_ASSERT(0);
|
|
|
++}
|
|
|
++#endif
|
|
|
++#endif
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/timers.c b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/timers.c
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..b5b5693d53
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/FreeRTOS/timers.c
|
|
|
+@@ -0,0 +1,328 @@
|
|
|
++/*
|
|
|
++ * FreeRTOS Kernel V10.4.6
|
|
|
++ * Copyright (C) 2021 Amazon.com, Inc. or its affiliates. All Rights Reserved.
|
|
|
++ *
|
|
|
++ * SPDX-License-Identifier: MIT
|
|
|
++ *
|
|
|
++ * Permission is hereby granted, free of charge, to any person obtaining a copy of
|
|
|
++ * this software and associated documentation files (the "Software"), to deal in
|
|
|
++ * the Software without restriction, including without limitation the rights to
|
|
|
++ * use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
|
|
|
++ * the Software, and to permit persons to whom the Software is furnished to do so,
|
|
|
++ * subject to the following conditions:
|
|
|
++ *
|
|
|
++ * The above copyright notice and this permission notice shall be included in all
|
|
|
++ * copies or substantial portions of the Software.
|
|
|
++ *
|
|
|
++ * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
|
|
++ * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
|
|
|
++ * FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
|
|
|
++ * COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
|
|
|
++ * IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
|
|
|
++ * CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
|
|
++ *
|
|
|
++ * https://www.FreeRTOS.org
|
|
|
++ * https://github.com/FreeRTOS
|
|
|
++ *
|
|
|
++ */
|
|
|
++
|
|
|
++/* Standard includes. */
|
|
|
++#include <stdlib.h>
|
|
|
++
|
|
|
++#include "FreeRTOS.h"
|
|
|
++#include "task.h"
|
|
|
++#include "queue.h"
|
|
|
++#include "timers.h"
|
|
|
++
|
|
|
++/* This entire source file will be skipped if the application is not configured
|
|
|
++ * to include software timer functionality. This #if is closed at the very bottom
|
|
|
++ * of this file. If you want to include software timer functionality then ensure
|
|
|
++ * configUSE_TIMERS is set to 1 in FreeRTOSConfig.h. */
|
|
|
++#if ( configUSE_TIMERS == 1 )
|
|
|
++
|
|
|
++ typedef void (* rt_timer_callback_t)(void *);
|
|
|
++
|
|
|
++/* The definition of the timers themselves. */
|
|
|
++ typedef struct tmrTimerControl
|
|
|
++ {
|
|
|
++ struct rt_timer timer;
|
|
|
++ void * pvTimerID; /*<< An ID to identify the timer. This allows the timer to be identified when the same callback is used for multiple timers. */
|
|
|
++ } xTIMER;
|
|
|
++
|
|
|
++ typedef xTIMER Timer_t;
|
|
|
++
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ #if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ TimerHandle_t xTimerCreate( const char * const pcTimerName,
|
|
|
++ const TickType_t xTimerPeriodInTicks,
|
|
|
++ const UBaseType_t uxAutoReload,
|
|
|
++ void * const pvTimerID,
|
|
|
++ TimerCallbackFunction_t pxCallbackFunction )
|
|
|
++ {
|
|
|
++ Timer_t * pxNewTimer;
|
|
|
++ rt_uint8_t flag = RT_TIMER_FLAG_SOFT_TIMER;
|
|
|
++
|
|
|
++ pxNewTimer = ( Timer_t * ) RT_KERNEL_MALLOC( sizeof( Timer_t ) );
|
|
|
++
|
|
|
++ if( pxNewTimer != RT_NULL )
|
|
|
++ {
|
|
|
++ if ( uxAutoReload != pdFALSE )
|
|
|
++ {
|
|
|
++ flag |= RT_TIMER_FLAG_PERIODIC;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ flag |= RT_TIMER_FLAG_ONE_SHOT;
|
|
|
++ }
|
|
|
++ rt_timer_init( ( rt_timer_t ) pxNewTimer, pcTimerName, ( rt_timer_callback_t ) pxCallbackFunction, pxNewTimer, xTimerPeriodInTicks, flag );
|
|
|
++ pxNewTimer->pvTimerID = pvTimerID;
|
|
|
++ /* Mark as dynamic so we can distinguish when deleting */
|
|
|
++ ( ( rt_timer_t ) pxNewTimer )->parent.type &= ~RT_Object_Class_Static;
|
|
|
++ }
|
|
|
++
|
|
|
++ return pxNewTimer;
|
|
|
++ }
|
|
|
++
|
|
|
++ #endif /* configSUPPORT_DYNAMIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ #if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++
|
|
|
++ TimerHandle_t xTimerCreateStatic( const char * const pcTimerName,
|
|
|
++ const TickType_t xTimerPeriodInTicks,
|
|
|
++ const UBaseType_t uxAutoReload,
|
|
|
++ void * const pvTimerID,
|
|
|
++ TimerCallbackFunction_t pxCallbackFunction,
|
|
|
++ StaticTimer_t * pxTimerBuffer )
|
|
|
++ {
|
|
|
++ Timer_t * pxNewTimer;
|
|
|
++ rt_uint8_t flag = RT_TIMER_FLAG_SOFT_TIMER;
|
|
|
++
|
|
|
++ #if ( configASSERT_DEFINED == 1 )
|
|
|
++ {
|
|
|
++ /* Sanity check that the size of the structure used to declare a
|
|
|
++ * variable of type StaticTimer_t equals the size of the real timer
|
|
|
++ * structure. */
|
|
|
++ volatile size_t xSize = sizeof( StaticTimer_t );
|
|
|
++ configASSERT( xSize == sizeof( Timer_t ) );
|
|
|
++ ( void ) xSize; /* Keeps lint quiet when configASSERT() is not defined. */
|
|
|
++ }
|
|
|
++ #endif /* configASSERT_DEFINED */
|
|
|
++
|
|
|
++ /* A pointer to a StaticTimer_t structure MUST be provided, use it. */
|
|
|
++ configASSERT( pxTimerBuffer );
|
|
|
++ pxNewTimer = ( Timer_t * ) pxTimerBuffer;
|
|
|
++
|
|
|
++ if( pxNewTimer != NULL )
|
|
|
++ {
|
|
|
++ if ( uxAutoReload != pdFALSE )
|
|
|
++ {
|
|
|
++ flag |= RT_TIMER_FLAG_PERIODIC;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ flag |= RT_TIMER_FLAG_ONE_SHOT;
|
|
|
++ }
|
|
|
++ rt_timer_init( ( rt_timer_t ) pxNewTimer, pcTimerName, ( rt_timer_callback_t ) pxCallbackFunction, pxNewTimer, xTimerPeriodInTicks, flag );
|
|
|
++ pxNewTimer->pvTimerID = pvTimerID;
|
|
|
++ }
|
|
|
++
|
|
|
++ return pxNewTimer;
|
|
|
++ }
|
|
|
++
|
|
|
++ #endif /* configSUPPORT_STATIC_ALLOCATION */
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ BaseType_t xTimerGenericCommand( TimerHandle_t xTimer,
|
|
|
++ const BaseType_t xCommandID,
|
|
|
++ const TickType_t xOptionalValue,
|
|
|
++ BaseType_t * const pxHigherPriorityTaskWoken,
|
|
|
++ const TickType_t xTicksToWait )
|
|
|
++ {
|
|
|
++ rt_err_t err = -RT_ERROR;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++
|
|
|
++ if ( ( xCommandID == tmrCOMMAND_START ) || ( xCommandID == tmrCOMMAND_START_FROM_ISR )
|
|
|
++ || ( xCommandID == tmrCOMMAND_RESET ) || ( xCommandID == tmrCOMMAND_RESET_FROM_ISR ) )
|
|
|
++ {
|
|
|
++ err = rt_timer_start( ( rt_timer_t ) xTimer );
|
|
|
++ }
|
|
|
++ else if ( ( xCommandID == tmrCOMMAND_STOP ) || ( xCommandID == tmrCOMMAND_STOP_FROM_ISR ) )
|
|
|
++ {
|
|
|
++ err = rt_timer_stop( ( rt_timer_t ) xTimer );
|
|
|
++ }
|
|
|
++ else if ( ( xCommandID == tmrCOMMAND_CHANGE_PERIOD ) || ( xCommandID == tmrCOMMAND_CHANGE_PERIOD_FROM_ISR ) )
|
|
|
++ {
|
|
|
++ if ( rt_timer_stop( ( rt_timer_t ) xTimer ) == RT_EOK )
|
|
|
++ {
|
|
|
++ if ( rt_timer_control( ( rt_timer_t ) xTimer, RT_TIMER_CTRL_SET_TIME, ( void * ) &xOptionalValue ) == RT_EOK )
|
|
|
++ {
|
|
|
++ err = rt_timer_start( ( rt_timer_t ) xTimer );
|
|
|
++ }
|
|
|
++ }
|
|
|
++ }
|
|
|
++ else if ( xCommandID == tmrCOMMAND_DELETE )
|
|
|
++ {
|
|
|
++ #if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ if ( rt_object_is_systemobject( ( rt_object_t ) xTimer ) )
|
|
|
++ #endif
|
|
|
++ {
|
|
|
++ #if ( configSUPPORT_STATIC_ALLOCATION == 1 )
|
|
|
++ err = rt_timer_detach( ( rt_timer_t ) xTimer );
|
|
|
++ #endif
|
|
|
++ #if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ #endif
|
|
|
++ #if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
|
|
|
++ ( ( rt_timer_t ) xTimer )->parent.type |= RT_Object_Class_Static;
|
|
|
++ err = rt_timer_detach( ( rt_timer_t ) xTimer );
|
|
|
++ RT_KERNEL_FREE( xTimer );
|
|
|
++ #endif
|
|
|
++ }
|
|
|
++ }
|
|
|
++
|
|
|
++ if ( ( xCommandID >= tmrFIRST_FROM_ISR_COMMAND ) && ( xCommandID <= tmrCOMMAND_CHANGE_PERIOD_FROM_ISR ) && ( pxHigherPriorityTaskWoken != NULL ) )
|
|
|
++ {
|
|
|
++ *pxHigherPriorityTaskWoken = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return rt_err_to_freertos( err );
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ TaskHandle_t xTimerGetTimerDaemonTaskHandle( void )
|
|
|
++ {
|
|
|
++ return ( TaskHandle_t ) rt_thread_find( "timer" );
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ TickType_t xTimerGetPeriod( TimerHandle_t xTimer )
|
|
|
++ {
|
|
|
++ Timer_t * pxTimer = xTimer;
|
|
|
++ rt_tick_t arg;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++ rt_timer_control( ( rt_timer_t ) pxTimer, RT_TIMER_CTRL_GET_TIME, &arg );
|
|
|
++
|
|
|
++ return ( TickType_t ) arg;
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ void vTimerSetReloadMode( TimerHandle_t xTimer,
|
|
|
++ const UBaseType_t uxAutoReload )
|
|
|
++ {
|
|
|
++ Timer_t * pxTimer = xTimer;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++ if ( uxAutoReload != pdFALSE )
|
|
|
++ {
|
|
|
++ rt_timer_control( ( rt_timer_t ) pxTimer, RT_TIMER_CTRL_SET_PERIODIC, RT_NULL );
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ rt_timer_control( ( rt_timer_t ) pxTimer, RT_TIMER_CTRL_SET_ONESHOT, RT_NULL );
|
|
|
++ }
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ UBaseType_t uxTimerGetReloadMode( TimerHandle_t xTimer )
|
|
|
++ {
|
|
|
++ Timer_t * pxTimer = xTimer;
|
|
|
++ UBaseType_t uxReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ if ( ( ( rt_timer_t ) pxTimer )->parent.flag & RT_TIMER_FLAG_PERIODIC )
|
|
|
++ {
|
|
|
++ uxReturn = ( UBaseType_t ) pdTRUE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ uxReturn = ( UBaseType_t ) pdFALSE;
|
|
|
++ }
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return uxReturn;
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ TickType_t xTimerGetExpiryTime( TimerHandle_t xTimer )
|
|
|
++ {
|
|
|
++ Timer_t * pxTimer = xTimer;
|
|
|
++ TickType_t xReturn;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++ rt_timer_control( ( rt_timer_t ) pxTimer, RT_TIMER_CTRL_GET_REMAIN_TIME, &xReturn );
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ const char * pcTimerGetName( TimerHandle_t xTimer )
|
|
|
++ {
|
|
|
++ Timer_t * pxTimer = xTimer;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++ return ( ( rt_timer_t ) pxTimer )->parent.name;
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ BaseType_t xTimerIsTimerActive( TimerHandle_t xTimer )
|
|
|
++ {
|
|
|
++ BaseType_t xReturn;
|
|
|
++ Timer_t * pxTimer = xTimer;
|
|
|
++ rt_uint32_t arg;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++
|
|
|
++ rt_timer_control( ( rt_timer_t ) pxTimer, RT_TIMER_CTRL_GET_STATE, &arg );
|
|
|
++ if ( arg == RT_TIMER_FLAG_ACTIVATED )
|
|
|
++ {
|
|
|
++ xReturn = pdTRUE;
|
|
|
++ }
|
|
|
++ else
|
|
|
++ {
|
|
|
++ xReturn = pdFALSE;
|
|
|
++ }
|
|
|
++
|
|
|
++ return xReturn;
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ void * pvTimerGetTimerID( const TimerHandle_t xTimer )
|
|
|
++ {
|
|
|
++ Timer_t * const pxTimer = xTimer;
|
|
|
++ void * pvReturn;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ pvReturn = pxTimer->pvTimerID;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++
|
|
|
++ return pvReturn;
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++ void vTimerSetTimerID( TimerHandle_t xTimer,
|
|
|
++ void * pvNewID )
|
|
|
++ {
|
|
|
++ Timer_t * const pxTimer = xTimer;
|
|
|
++ rt_base_t level;
|
|
|
++
|
|
|
++ configASSERT( xTimer );
|
|
|
++
|
|
|
++ level = rt_hw_interrupt_disable();
|
|
|
++ pxTimer->pvTimerID = pvNewID;
|
|
|
++ rt_hw_interrupt_enable( level );
|
|
|
++ }
|
|
|
++/*-----------------------------------------------------------*/
|
|
|
++
|
|
|
++#endif /* configUSE_TIMERS == 1 */
|
|
|
+diff --git a/components/freertos/RT-Thread-wrapper-of-FreeRTOS/readme.md b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/readme.md
|
|
|
+new file mode 100644
|
|
|
+index 0000000000..6a0fafb4c7
|
|
|
+--- /dev/null
|
|
|
++++ b/components/freertos/RT-Thread-wrapper-of-FreeRTOS/readme.md
|
|
|
+@@ -0,0 +1,3 @@
|
|
|
++# RT-Thread操作系统的FreeRTOS兼容层
|
|
|
++## FreeRTOS Application Compatibility Layer (ACL) for RT-Thread
|
|
|
++## 让基于FreeRTOS开发的应用层无感地迁移到RT-Thread操作系统
|
|
|
+--
|
|
|
+2.32.0 (Apple Git-132)
|
|
|
+
|
|
|
+
|
|
|
+From 9981521890074b517074bf85a4e0a1f71cef851e Mon Sep 17 00:00:00 2001
|
|
|
+From: tangzz98 <tangz98@outlook.com>
|
|
|
+Date: Wed, 3 Aug 2022 16:17:06 +0800
|
|
|
+Subject: [PATCH 4/4] Update linker script for finsh
|
|
|
+
|
|
|
+---
|
|
|
+ components/esp_system/ld/esp32c3/sections.ld.in | 10 ++++++++++
|
|
|
+ 1 file changed, 10 insertions(+)
|
|
|
+
|
|
|
+diff --git a/components/esp_system/ld/esp32c3/sections.ld.in b/components/esp_system/ld/esp32c3/sections.ld.in
|
|
|
+index 8215237fff..561ae92318 100644
|
|
|
+--- a/components/esp_system/ld/esp32c3/sections.ld.in
|
|
|
++++ b/components/esp_system/ld/esp32c3/sections.ld.in
|
|
|
+@@ -248,6 +248,16 @@ SECTIONS
|
|
|
+ *(.fini.literal)
|
|
|
+ *(.fini)
|
|
|
+ *(.gnu.version)
|
|
|
++
|
|
|
++ /* section information for finsh shell */
|
|
|
++ . = ALIGN(4);
|
|
|
++ __fsymtab_start = .;
|
|
|
++ KEEP(*(FSymTab))
|
|
|
++ __fsymtab_end = .;
|
|
|
++ . = ALIGN(4);
|
|
|
++ __vsymtab_start = .;
|
|
|
++ KEEP(*(VSymTab))
|
|
|
++ __vsymtab_end = .;
|
|
|
+
|
|
|
+ /** CPU will try to prefetch up to 16 bytes of
|
|
|
+ * of instructions. This means that any configuration (e.g. MMU, PMS) must allow
|
|
|
+--
|
|
|
+2.32.0 (Apple Git-132)
|
|
|
+
|

{kind=link}

{kind=link}

{kind=link}
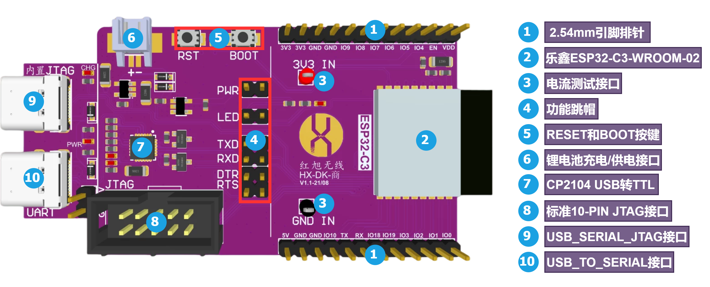
{kind=link}