|
|
@@ -11,45 +11,96 @@ ethercat 命令行
|
|
|
|
|
|
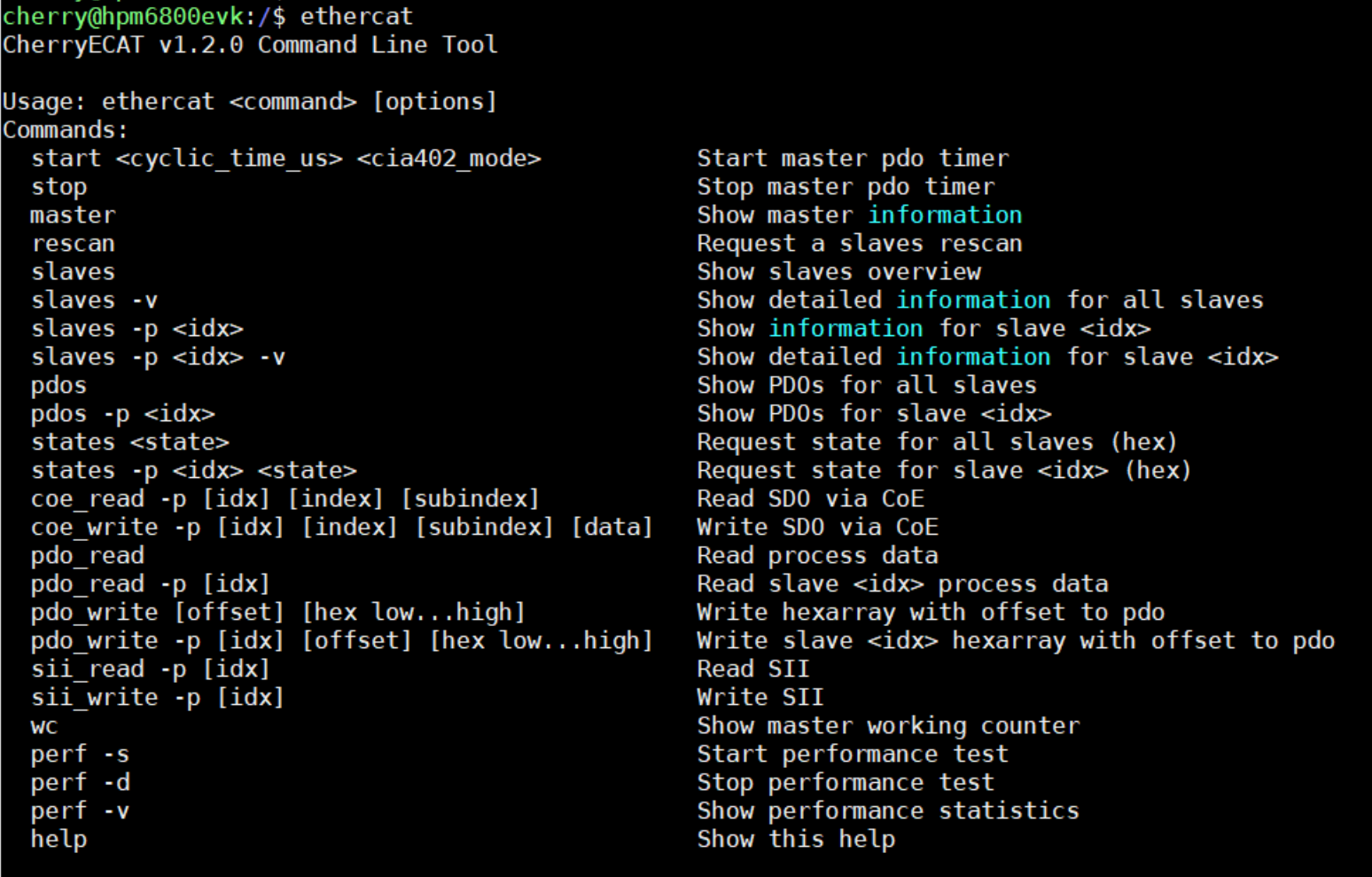
我们提供了一个简单的命令行工具 `ethercat` 用于测试 CherryECAT 功能。为了方便使用过 IgH 的 linux 用户过渡,格式部分参考的是 IgH。
|
|
|
|
|
|
-- ethercat master: 用于查看主站状态,数据统计等信息
|
|
|
-- ethercat rescan: 重新扫描总线
|
|
|
-- ethercat slaves: 查看从站信息,使用 `-p` 参数选择指定从站,使用 `-v` 参数查看详细信息
|
|
|
-- ethercat pdos: 查看 PDO 映射信息,使用 `-p` 参数选择指定从站
|
|
|
-- ethercat states: 请求从站状态转换, 使用 `-p` 参数选择指定从站,状态需要从 `ec_slave_state_t` 枚举中选择并以十六进制输入
|
|
|
-- ethercat coe_read: 通过 CoE 读取 SDO, 使用 `-p` 参数选择指定从站,后续参数依次为 index, subindex, 如果忽略 subindex 则使用 sdo complete 模式
|
|
|
-- ethercat coe_write: 通过 CoE 写入 SDO,使用 `-p` 参数选择指定从站,后续参数依次为 index, subindex, data,不使用 sdo complete 模式
|
|
|
-- ethercat foe_read: 通过 FoE 读取文件, 使用 `-p` 参数选择指定从站,后续参数依次为 filename, pwd 和 16进制数组,数组从低位到高位输入
|
|
|
-- ethercat foe_write: 通过 FoE 写入文件,使用 `-p` 参数选择指定从站,后续参数依次为 filename, pwd 和 16进制数组,数组从低位到高位输入
|
|
|
-- ethercat eoe_start: 启动 EoE 功能
|
|
|
-- ethercat pdo_read: 读取过程数据,使用 `-p` 参数选择指定从站
|
|
|
-- ethercat pdo_write: 写入过程数据,使用 `-p` 参数选择指定从站,后续参数依次为 offset 和 16进制数组,数组从低位到高位输入,offset 表示写入数据在 PDO 中的偏移位置
|
|
|
-- ethercat sii_read: 读取 SII 数据, 使用 `-p` 参数选择指定从站
|
|
|
-- ethercat sii_write: 写入 SII 数据, 使用 `-p` 参数选择指定从站
|
|
|
-- ethercat wc: 查看主站工作计数器
|
|
|
-- ethercat perf: 性能测试, 使用 `-s` 参数开始,使用 `-v` 参数查看测试结果,使用 `-d` 参数停止测试
|
|
|
-- ethercat timediff: 系统时间差监测,使用 `-s` 参数开始,使用 `-v` 参数查看测试结果,使用 `-d` 参数停止测试
|
|
|
+- **ethercat start**: 启动主站 PDO 定时器,切换所有 slaves 到 OP 状态,后续参数依次为主站定时器周期(单位微秒)和 CIA402 模式(可选,默认为 0),支持的 CIA402 模式有:
|
|
|
+
|
|
|
+.. code-block:: c
|
|
|
+ :linenos:
|
|
|
+
|
|
|
+ #define EC_CIA402_OPERATION_MODE_NO_MODE 0x00
|
|
|
+ #define EC_CIA402_OPERATION_MODE_CSP 0x01
|
|
|
+ #define EC_CIA402_OPERATION_MODE_CSV 0x02
|
|
|
+ #define EC_CIA402_OPERATION_MODE_CSP_CSV 0x03
|
|
|
+ #define EC_CIA402_OPERATION_MODE_CST 0x04
|
|
|
+ #define EC_CIA402_OPERATION_MODE_HOME 0x05
|
|
|
+
|
|
|
+- **ethercat stop**: 停止主站 PDO 定时器,切换所有 slaves 到 PREOP 状态
|
|
|
+- **ethercat master**: 用于查看主站状态,数据统计等信息
|
|
|
+- **ethercat rescan**: 重新扫描总线
|
|
|
+- **ethercat slaves**: 查看从站信息,使用 `-p` 参数选择指定从站,使用 `-v` 参数查看详细信息
|
|
|
+- **ethercat pdos**: 查看 PDO 映射信息,使用 `-p` 参数选择指定从站
|
|
|
+- **ethercat states**: 请求从站状态转换, 使用 `-p` 参数选择指定从站,状态需要从 `ec_slave_state_t` 枚举中选择并以十六进制输入
|
|
|
+- **ethercat coe_read**: 通过 CoE 读取 SDO, 使用 `-p` 参数选择指定从站,后续参数依次为 index, subindex, 如果忽略 subindex 则使用 sdo complete 模式
|
|
|
+- **ethercat coe_write**: 通过 CoE 写入 SDO,使用 `-p` 参数选择指定从站,后续参数依次为 index, subindex, data,不使用 sdo complete 模式
|
|
|
+- **ethercat foe_read**: 通过 FoE 读取文件, 使用 `-p` 参数选择指定从站,后续参数依次为 filename, pwd 和 16进制数组,数组从低位到高位输入
|
|
|
+- **ethercat foe_write**: 通过 FoE 写入文件,使用 `-p` 参数选择指定从站,后续参数依次为 filename, pwd 和 16进制数组,数组从低位到高位输入
|
|
|
+- **ethercat eoe_start**: 启动 EoE 功能
|
|
|
+- **ethercat pdo_read**: 读取过程数据,使用 `-p` 参数选择指定从站
|
|
|
+- **ethercat pdo_write**: 写入过程数据,使用 `-p` 参数选择指定从站,后续参数依次为 offset 和 16进制数组,数组从低位到高位输入,offset 表示写入数据在 PDO 中的偏移位置
|
|
|
+- **ethercat sii_read**: 读取 SII 数据, 使用 `-p` 参数选择指定从站
|
|
|
+- **ethercat sii_write**: 写入 SII 数据, 使用 `-p` 参数选择指定从站
|
|
|
+- **ethercat wc**: 查看主站工作计数器
|
|
|
+- **ethercat perf**: 性能测试, 使用 `-s` 参数开始,使用 `-v` 参数查看测试结果,使用 `-d` 参数停止测试
|
|
|
|
|
|
典型使用流程
|
|
|
-----------------
|
|
|
|
|
|
-ethercat 命令行中并没有提供启动周期性传输的命令,因为需要用户配置 slave 的一些参数后才能使用周期性传输功能。下面是一个典型的使用流程:
|
|
|
-
|
|
|
- 调用 `ec_master_init` 初始化主站
|
|
|
- 为每个 slave 配置 config 参数,包括 PDO 映射、DC 同步等, `ec_slave_config_t` 结构体定义如下:
|
|
|
|
|
|
.. code-block:: c
|
|
|
:linenos:
|
|
|
|
|
|
- ec_sync_info_t *sync; /**< Sync manager configuration. */
|
|
|
- uint8_t sync_count; /**< Number of sync managers. */
|
|
|
- ec_pdo_callback_t pdo_callback; /**< PDO process data callback. */
|
|
|
- uint16_t dc_assign_activate; /**< dc assign control */
|
|
|
- ec_sync_signal_t dc_sync[EC_SYNC_SIGNAL_COUNT]; /**< DC sync signals. */
|
|
|
+ typedef struct {
|
|
|
+ ec_sync_info_t *sync; /**< Sync manager configuration. */
|
|
|
+ uint8_t sync_count; /**< Number of sync managers. */
|
|
|
+ ec_pdo_callback_t pdo_callback; /**< PDO process data callback. */
|
|
|
+ uint16_t dc_assign_activate; /**< dc assign control */
|
|
|
+ ec_sync_signal_t dc_sync[EC_SYNC_SIGNAL_COUNT]; /**< DC sync signals. */
|
|
|
+ } ec_slave_config_t;
|
|
|
+
|
|
|
+
|
|
|
+ // 举例从协议栈提供的部分 slave 信息中寻找 sync 信息,并进行配置
|
|
|
+ for (uint32_t i = 0; i < global_cmd_master->slave_count; i++) {
|
|
|
+ ret = ec_master_find_slave_sync_info(global_cmd_master->slaves[i].sii.vendor_id,
|
|
|
+ global_cmd_master->slaves[i].sii.product_code,
|
|
|
+ global_cmd_master->slaves[i].sii.revision_number,
|
|
|
+ motor_mode,
|
|
|
+ &slave_config[i].sync,
|
|
|
+ &slave_config[i].sync_count);
|
|
|
+ if (ret != 0) {
|
|
|
+ EC_LOG_ERR("Failed to find slave sync info: vendor_id=0x%08x, product_code=0x%08x\n",
|
|
|
+ global_cmd_master->slaves[i].sii.vendor_id,
|
|
|
+ global_cmd_master->slaves[i].sii.product_code);
|
|
|
+ return -1;
|
|
|
+ }
|
|
|
|
|
|
-- 配置主站 master 相关参数,包括 `cycle_time`、 `shift_time`、`dc_sync_with_dc_ref_enable` 等
|
|
|
+ slave_config[i].dc_assign_activate = 0x300;
|
|
|
|
|
|
-`cycle_time` 代表主站定时器的周期,单位为纳秒。 `shift_time` 代表相对于 cycle_time 的滞后时间,单位为纳秒,通常设置为 20% 的 cycle_time。 `dc_sync_with_dc_ref_enable` 代表 DC 同步是与主站时钟同步还是和第一个带有 DC 的从站同步。
|
|
|
+ slave_config[i].dc_sync[0].cycle_time = atoi(argv[1]) * 1000;
|
|
|
+ slave_config[i].dc_sync[0].shift_time = 1000000;
|
|
|
+ slave_config[i].dc_sync[1].cycle_time = 0;
|
|
|
+ slave_config[i].dc_sync[1].shift_time = 0;
|
|
|
+ slave_config[i].pdo_callback = ec_pdo_callback;
|
|
|
+
|
|
|
+ global_cmd_master->slaves[i].config = &slave_config[i];
|
|
|
+ }
|
|
|
+
|
|
|
+.. note:: 定义的 config 变量需要是全局变量
|
|
|
+
|
|
|
+- 配置主站 master 相关参数,包括 `cycle_time`、 `shift_time`、 `dc_sync_with_dc_ref_enable` 等
|
|
|
+
|
|
|
+ - `cycle_time` 代表主站定时器的周期,单位为纳秒。
|
|
|
+ - `shift_time` 代表相对于 cycle_time 的滞后时间,单位为纳秒,通常设置为 20% 的 cycle_time。
|
|
|
+ - `dc_sync_with_dc_ref_enable` 代表 DC 同步是与主站时钟同步还是和第一个带有 DC 的从站同步。通常推荐和从站同步。
|
|
|
|
|
|
- 最后调用 `ec_master_start` 启动周期性传输,如果从站没有扫描就调用,则会一直死等,直到所有从站扫描完成。
|
|
|
|
|
|
+.. code-block:: c
|
|
|
+ :linenos:
|
|
|
+
|
|
|
+ global_cmd_master->cycle_time = atoi(argv[2]) * 1000; // cycle time in ns
|
|
|
+ global_cmd_master->shift_time = atoi(argv[2]) * 1000 * 0.2; // 20% shift time in ns
|
|
|
+ global_cmd_master->dc_sync_with_dc_ref_enable = true; // enable DC sync with dc reference clock
|
|
|
+ ec_master_start(global_cmd_master);
|
|
|
+
|
|
|
- 对于时间敏感的 PDO 处理,可以在设置的 `pdo_callback` 中进行。对于不敏感的,异步的处理,则可以使用 `ec_master_get_slave_domain_*` 系列函数进行读写。
|

{kind=link}
{kind=link}
